gmd
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von gmd
-
 Danke fuer die thumbs up Fuer meine frage bezueglich der quertragewerke habe ich ja keine antwort bekommen, also muss ich das denken alleine machen. Habe mal verschiedene scenarien gedanklich durchgespielt, mit ein paar hilfslinien am modell und komme zu dem ergebnis, dass eine automatische plazierung der quertragewerke auszuschliessen ist, jedenfalls mit meinen derzeitigen moeglichkeiten und absichten. Das problem is automatisch loesbar, aber mit viel mehr aufwand als ich derzeit bereit bin zu investieren, Also eine interaktive, semi automatische loesung ist das ziel. Hier meine todo liste mit elementarfunktionen: Plazieren von quertragewerken und fahrdraehten in bahnhofsbereichen Voraussetzung: Gleisplan mit eindeutig benannten elementen ist eingelesen und korreky gezeichnet. · Plazieren (interaktiv), muster fuer quertragewerk an anfangsposition Ein turmmast element wird plaziert, mit abspannkette als angangsposittion, eindeutig benannt. (benanntes muster in beispiel bereich) Selektieren und einlesen der elemente fuer positionierung. Addieren kettenelemente, anzahl wie benoetigt. Plazieren des endmasts mit abspannung Manuelle laengenkorrektur falls erforderlich Einlesen der entgueltigen configuration mit positionsdaten · Positionieren peilstaebe auf ueberspannten gleisen and tragewerk Aus gleisplan und tragewerkposition werden die peilstabpositionen berechnet und peilstaebe positioniert als benanntes set. · Positionieren haenger in peilstabposition per tragewerk an jeder stabposition wird ein haenger plaziert (benanntes muster in beispiel bereich) Peilstaebe ausblenden · Duplizieren des musters in definierter distanz/richtung mit nudge funktion Programmatisches clonen und verschieben des zuvor plazierten quertragewerks (ohne haenger) Feinpositionierung mit nudge funktion in 4 richtungen Manuelle laengenkorrektur falls erforderlich Einlesen der entgueltigen configuration mit positionsdaten Wie oben: Peilstaebe und haenger plazieren und speichern · Plazieren draehte zwischen zwei tragewerken, basierend auf musterdraht Ein gerader draht (eindeutiger name) wird exact plaziert ueber dem ersten geraden gleis. Musterdraht wird eingelesen und in allen verbindung positioniert (clone) und ausgerichtet, gerade sind wharscheinlich ok, abzweigungen sind ausgerichtet. Manuelle feinausrichtung (abzweigungen) Einlesen der entgueltigen konfiguration und abspeichern · Ein/Ausblenden von peilstaeben · Einlesen von entgueltiger configuration und abspeichern von tragewerken und draehten · Zusaetzlich setzen von extras, mastlampen, trafos etc. Das werden die grundelemente der funktion zur plazierung von quertragewerken. Wenn das gemacht ist, gehe ich an die verbindung der vorhandenen streckenpositionierung and die quertragewerke. Gruss gmd
Danke fuer die thumbs up Fuer meine frage bezueglich der quertragewerke habe ich ja keine antwort bekommen, also muss ich das denken alleine machen. Habe mal verschiedene scenarien gedanklich durchgespielt, mit ein paar hilfslinien am modell und komme zu dem ergebnis, dass eine automatische plazierung der quertragewerke auszuschliessen ist, jedenfalls mit meinen derzeitigen moeglichkeiten und absichten. Das problem is automatisch loesbar, aber mit viel mehr aufwand als ich derzeit bereit bin zu investieren, Also eine interaktive, semi automatische loesung ist das ziel. Hier meine todo liste mit elementarfunktionen: Plazieren von quertragewerken und fahrdraehten in bahnhofsbereichen Voraussetzung: Gleisplan mit eindeutig benannten elementen ist eingelesen und korreky gezeichnet. · Plazieren (interaktiv), muster fuer quertragewerk an anfangsposition Ein turmmast element wird plaziert, mit abspannkette als angangsposittion, eindeutig benannt. (benanntes muster in beispiel bereich) Selektieren und einlesen der elemente fuer positionierung. Addieren kettenelemente, anzahl wie benoetigt. Plazieren des endmasts mit abspannung Manuelle laengenkorrektur falls erforderlich Einlesen der entgueltigen configuration mit positionsdaten · Positionieren peilstaebe auf ueberspannten gleisen and tragewerk Aus gleisplan und tragewerkposition werden die peilstabpositionen berechnet und peilstaebe positioniert als benanntes set. · Positionieren haenger in peilstabposition per tragewerk an jeder stabposition wird ein haenger plaziert (benanntes muster in beispiel bereich) Peilstaebe ausblenden · Duplizieren des musters in definierter distanz/richtung mit nudge funktion Programmatisches clonen und verschieben des zuvor plazierten quertragewerks (ohne haenger) Feinpositionierung mit nudge funktion in 4 richtungen Manuelle laengenkorrektur falls erforderlich Einlesen der entgueltigen configuration mit positionsdaten Wie oben: Peilstaebe und haenger plazieren und speichern · Plazieren draehte zwischen zwei tragewerken, basierend auf musterdraht Ein gerader draht (eindeutiger name) wird exact plaziert ueber dem ersten geraden gleis. Musterdraht wird eingelesen und in allen verbindung positioniert (clone) und ausgerichtet, gerade sind wharscheinlich ok, abzweigungen sind ausgerichtet. Manuelle feinausrichtung (abzweigungen) Einlesen der entgueltigen konfiguration und abspeichern · Ein/Ausblenden von peilstaeben · Einlesen von entgueltiger configuration und abspeichern von tragewerken und draehten · Zusaetzlich setzen von extras, mastlampen, trafos etc. Das werden die grundelemente der funktion zur plazierung von quertragewerken. Wenn das gemacht ist, gehe ich an die verbindung der vorhandenen streckenpositionierung and die quertragewerke. Gruss gmd -
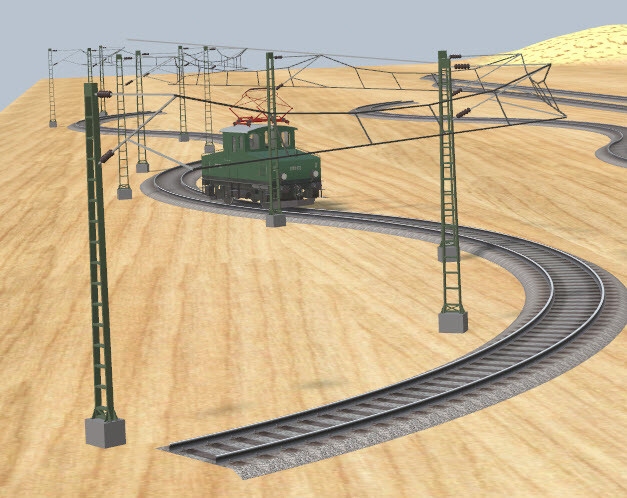
Hallo, habe mir ein beispiel gebastelt, mit dem ich die plazierung der quertragewerke implementieren und testen will .. Ich bin nicht sicher ob das beispiel ueberhaupt sinnvoll ist, allerdings haette ich so etwas gerne fuer meine betriebssteuerung. Hat irgendjemand eine idee fuer faustregeln mit denen ich eine plazierung angehen kann ? Weichen mitten ? oder enden? weitere support masten wenn es zu eng wird zwischen den quertraegern ? Oder auch tragewerke in einem winkel installieren ? oder nur 90 grad gegen gleise ? Bin fuer jede idee dankbar. Gruss gmd
-
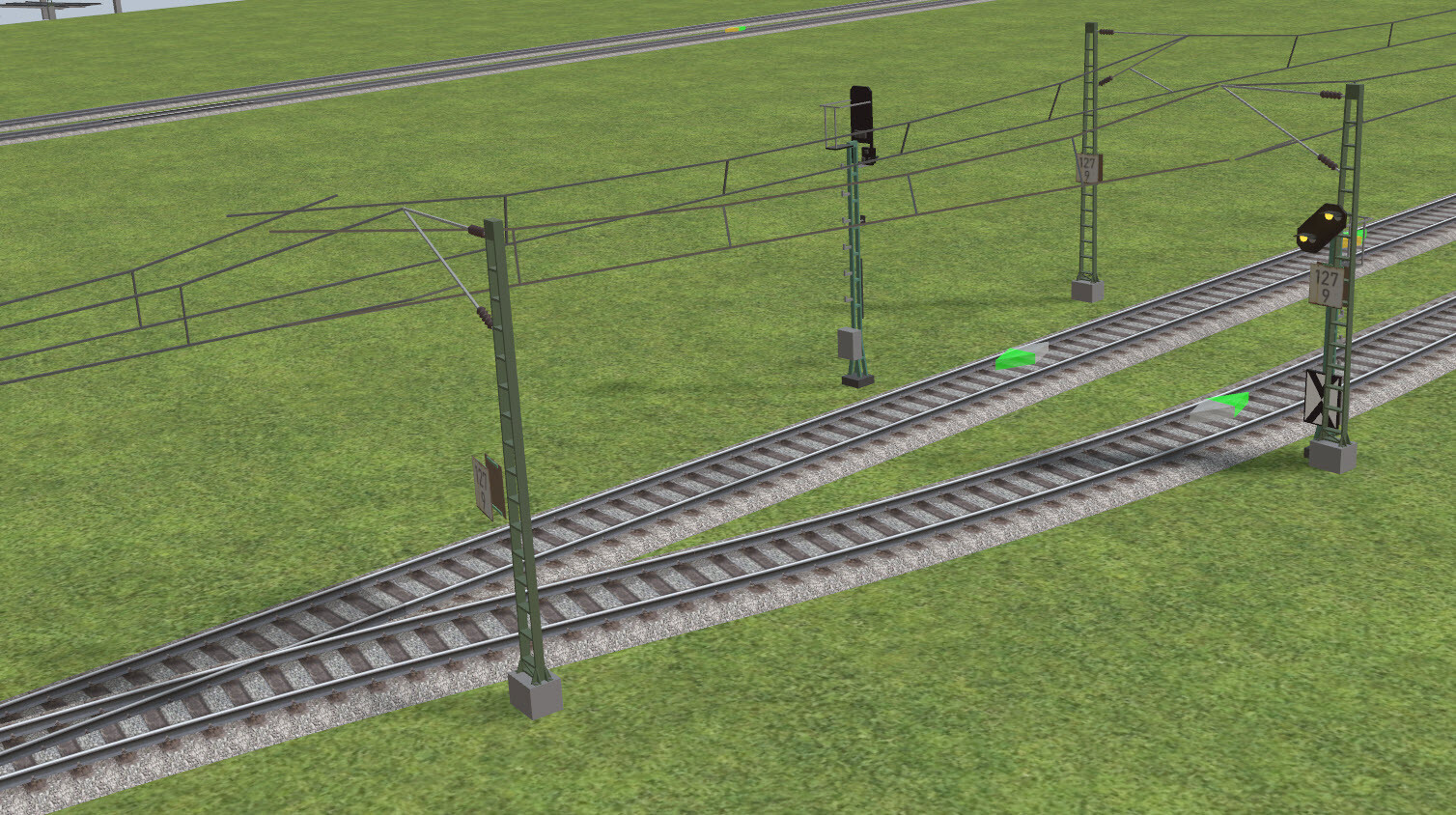
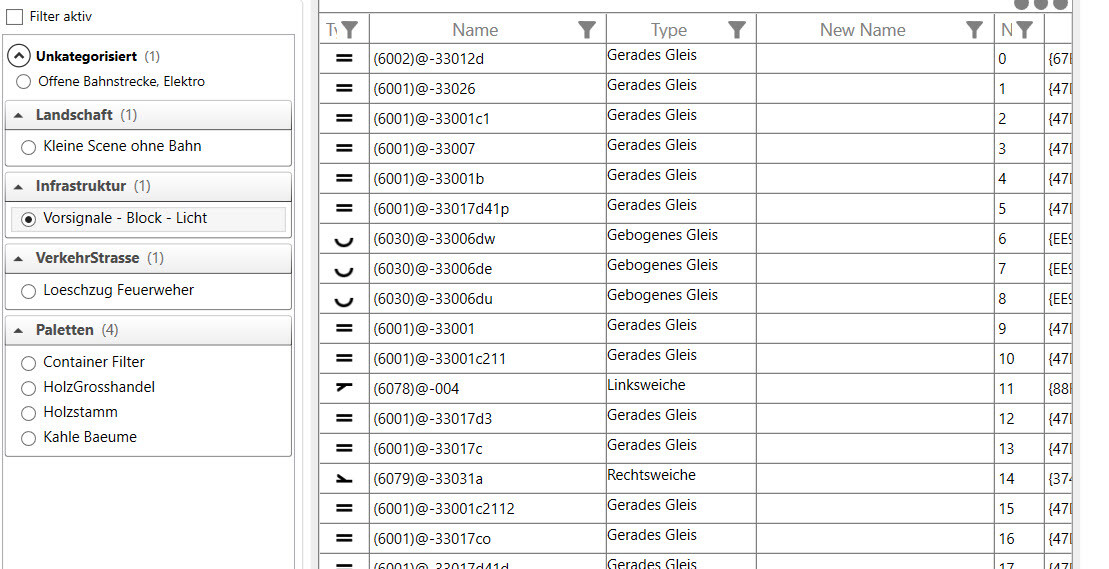
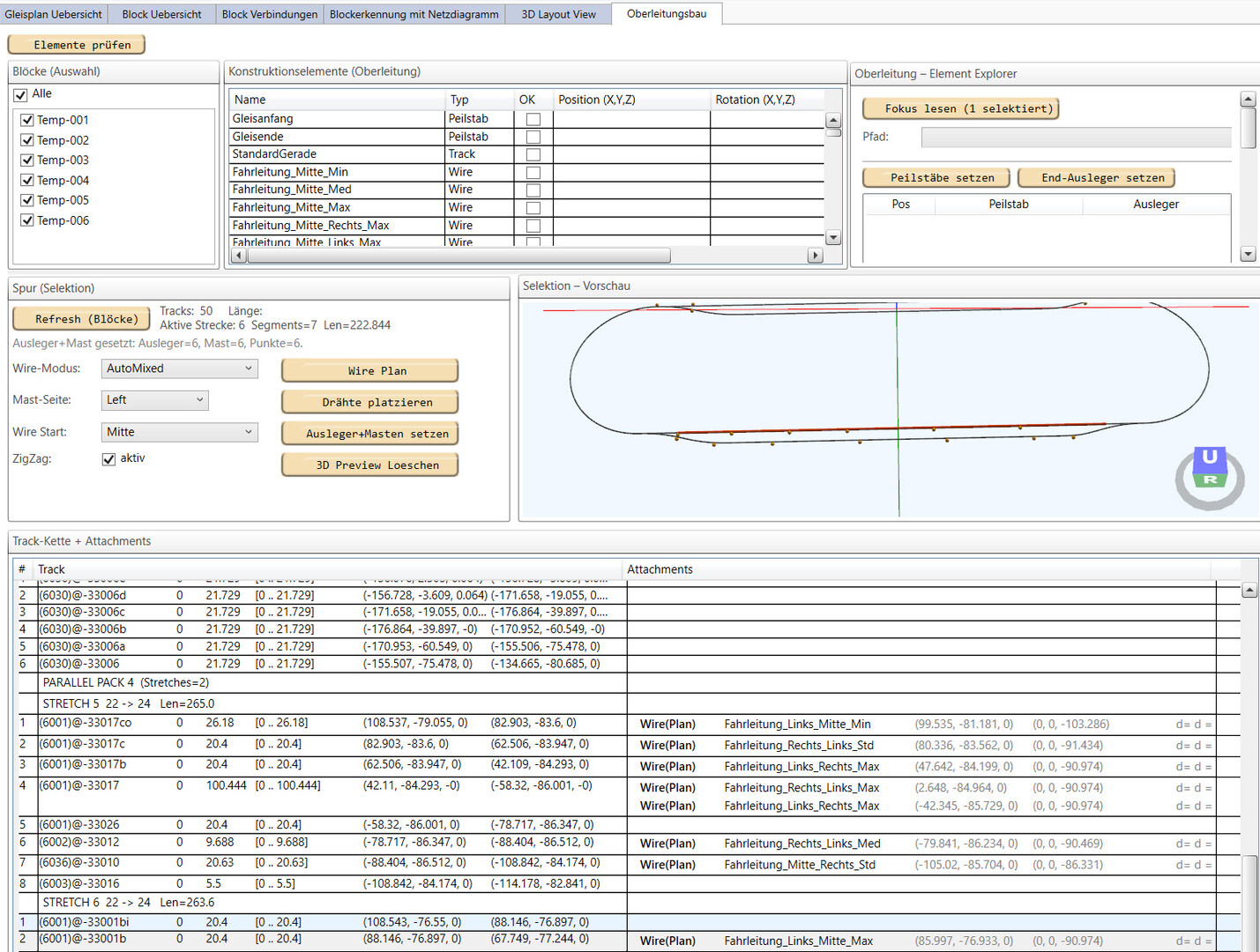
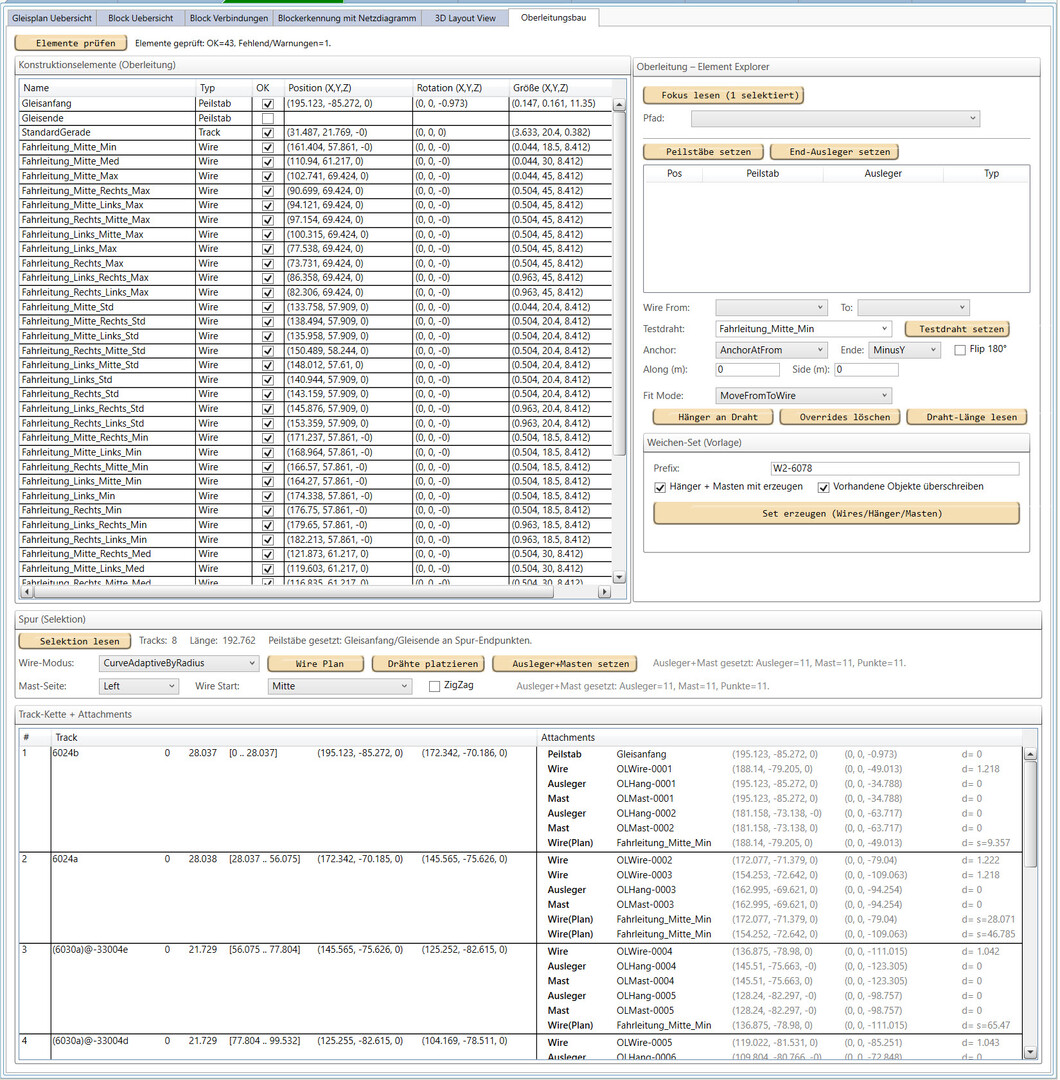
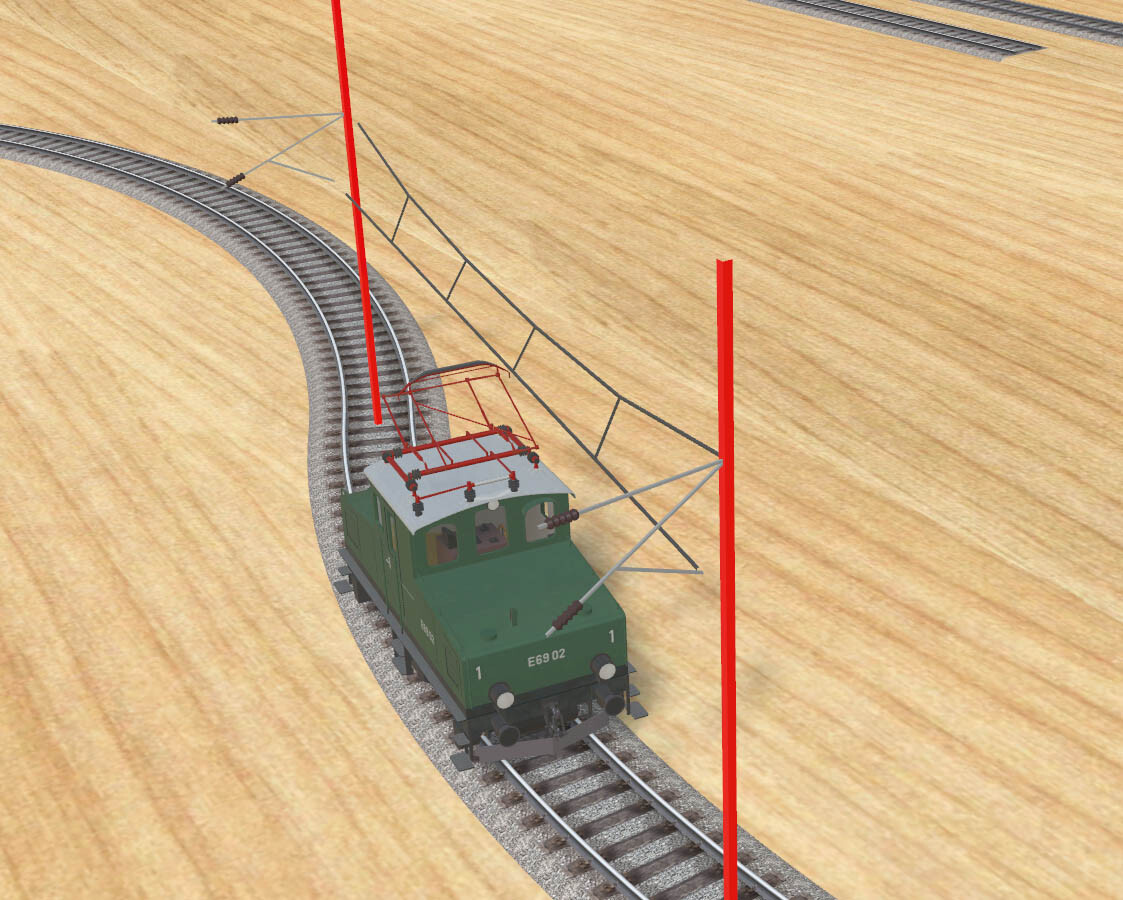
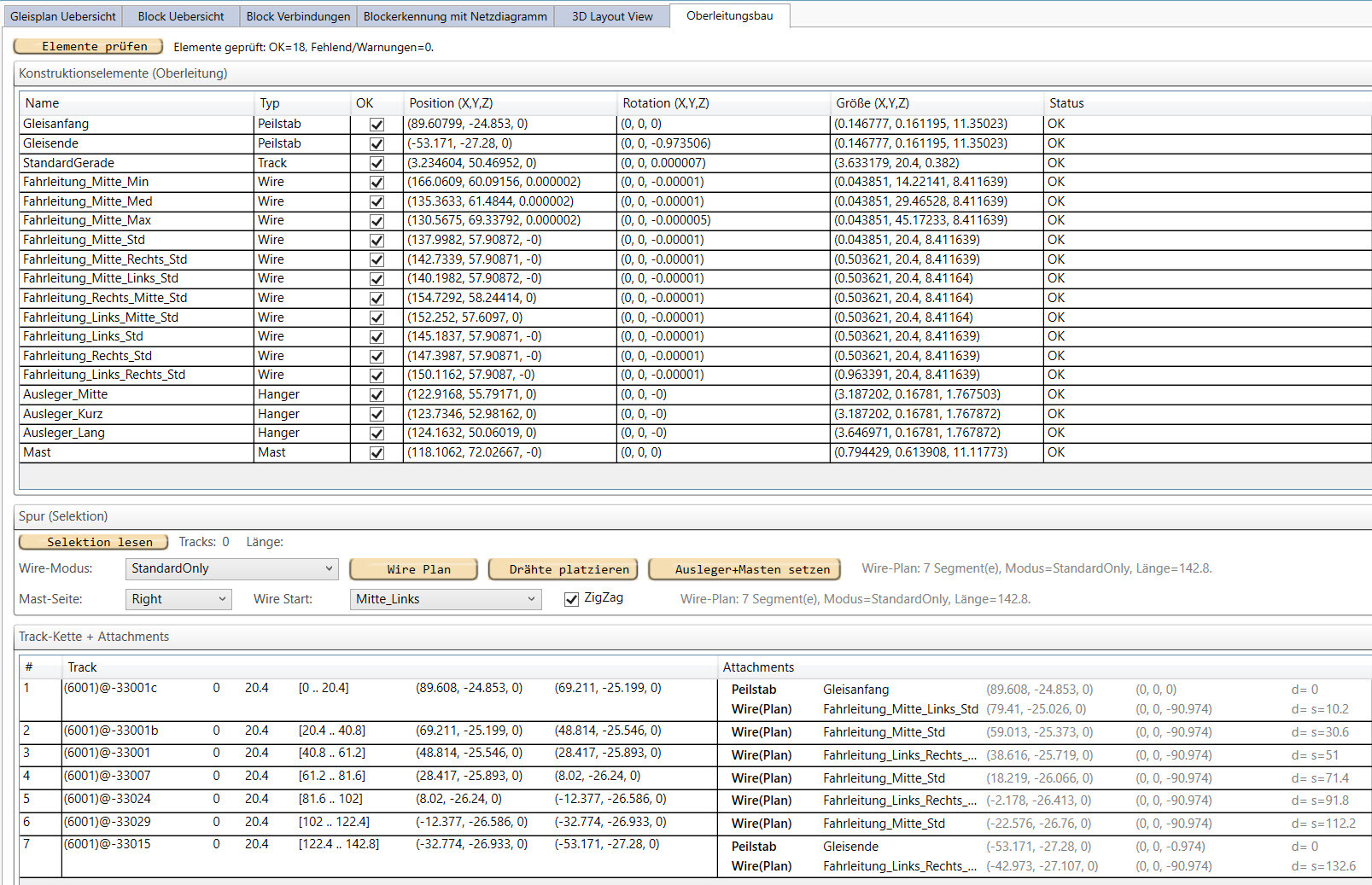
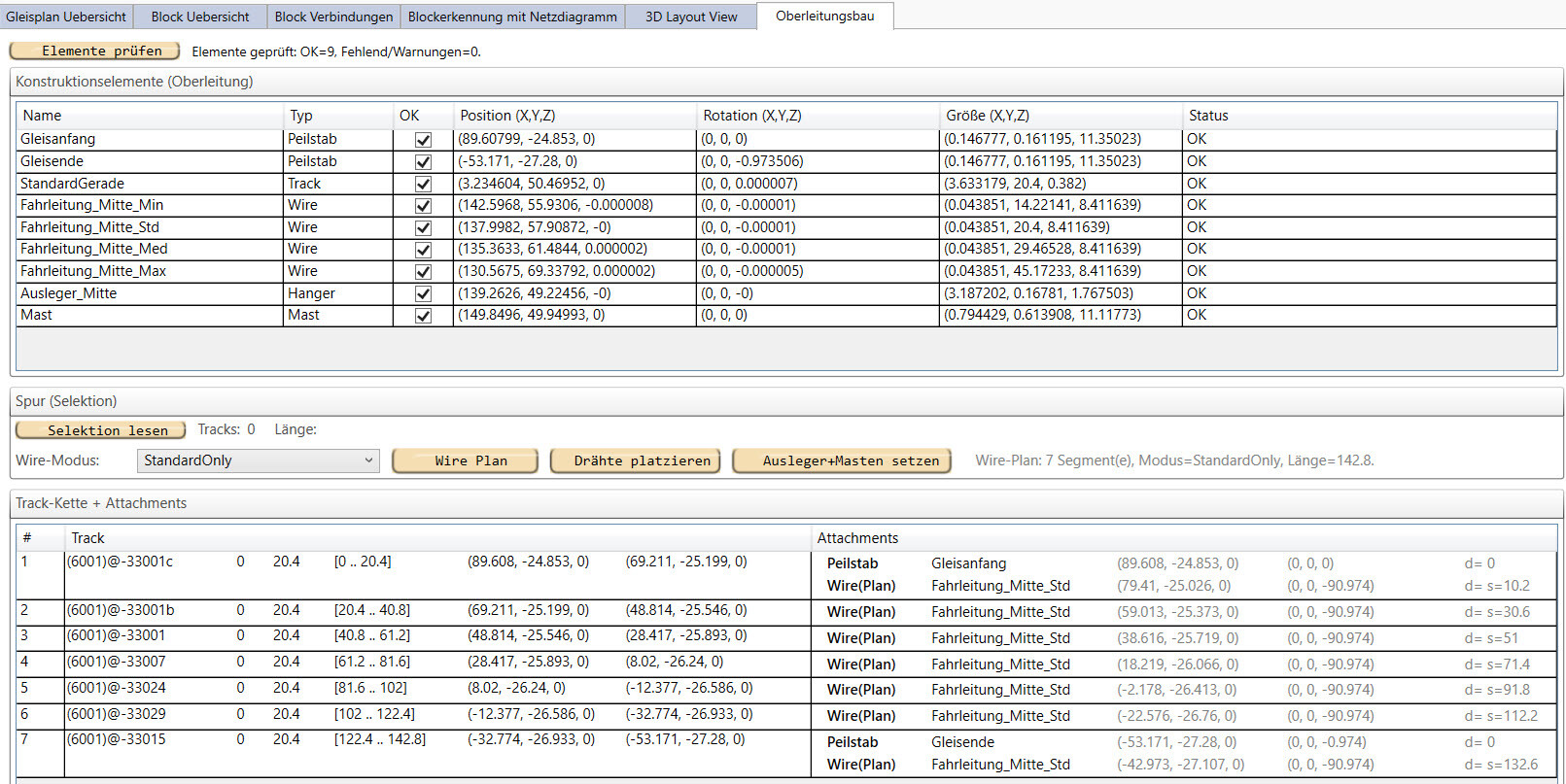
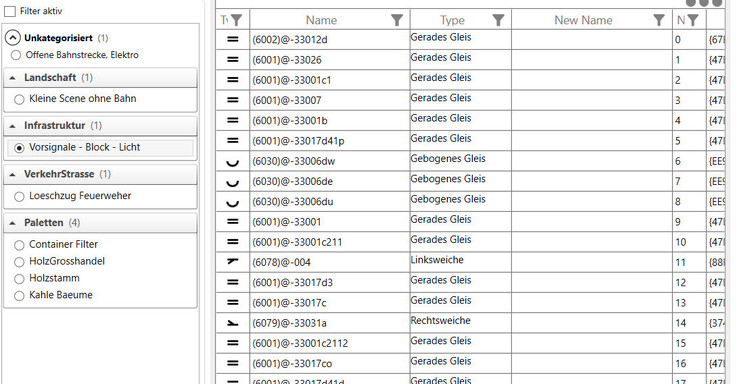
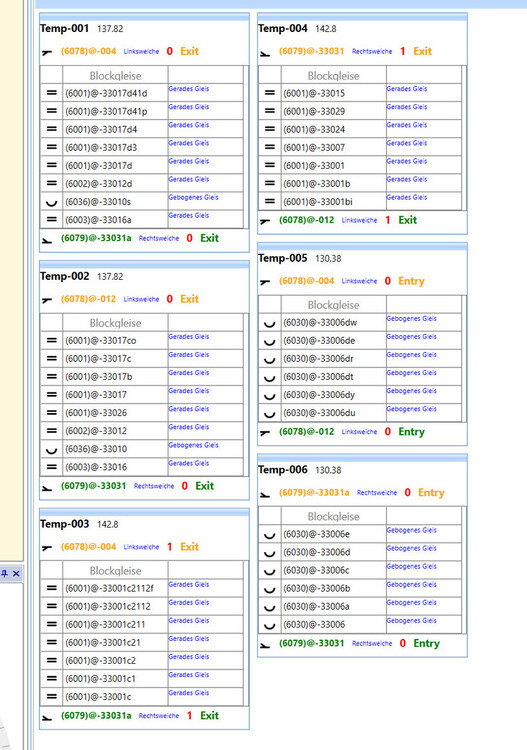
Hallo, wollte mal wieder berichten. Hatte nicht viel zeit die letzten tage, immer mal wieder an der strategie fuer die drahtplazierung gebastelt. Ich verwende vorgefertigte muster fuer weichen oder beliebige spezielle gruppen. Diese werden halbautomatisch aus den vorhandenen definierten draehten erstellt und manuell justiert (laenge) .. sind sonst zuviele einzelnen laengen. Die draehte sind in 4 laengen mit allen varianten vorderfiniert und werden plaziert durch cloning. Das sind complette elemente in meinem katalog, also nur einmal erstellt. Da ich ja nur feste laengen habe und prinzipiell die weichen mit den vorgefertigten teilen perfekt ueberspannen kann werden die gleis verbindungen and einer seite genau plaziert und an der anderen seite entsteht ein ueberstand, der dann manuell justiert werden kann .. Ist einfach, da der draht in der richtigen richtung liegt und einfach einschnappt. Manchmal geht es sogar fast auf, da ich die laengen so gewaehlt habe, dass alle radien gut abgedeckt werden. Im obigen bild sieht man den laengenversatz am endmast der weiche, der aber einfach zu fixen ist .. Soweit so gut, viel besser kann ich das nicht machen, ohne variable draehte. Drahtlaengen werden je nach radius ausgesucht und bei langen strecken minimum 3x450mm verwende ich die laengsten draehte, aber grundsaetzlich im zizack. Alle weichen sind mittig ueberspannt. Der naechste schritt is das setzen der masten and parallelstrecken und dann die Quertragewerke. Klar ist, dass das nur eine halbautomatik ist, aber ich verbinde das mit meiner blockerkennung, die ja bereits gemacht ist. Objekte werden eingelesen, nach abschnitten, und gefiltert (filterdefinitionen siehe oben). Damit trenne ich gleise, kontakte und signale. Bloecke werden erkannt. Als naechstes werden hier die kontakte und signale zugeordnet, und falls nicht gesetzt, werden diese automatisch gesetzt, je nach definition des blocks. Dazu brauche ich noch ein paar stunden. Mein oberleitungslabor ist jetzt erweitert mit der blockliste (oben links). Damit kann ich jeweils bestimmte bloecke markieren, fuer die ich die oberleitung verlegen will. Also industriegleise (kleine radien) werden nicht verwendet, zuviele masten und gebogene draehte mag ich nun mal nicht. Habe das auch mal mit BahnLands normalgleisen probiert und das sieht natuerlich noch besser aus, da die weichen schlanker und laenger sind, groessere radien haben. Da witkt das ganze besser. Ich habe die Plazierungsstrategie "AUTOMIXED" implementiert, die wie der name sagt automatisch die drahtlaege bestimmt und den versatz, also nicht stur feste laengen verlegt. Andere strategien sind waehlbar, je nach situation. Wenn das alles mal laeuft, dann werden natuerlich freundlichere anzeigetabellen verwendet, weniger zahlen .. fuer jetzt sind das testhilfen. Gruss gmd

-
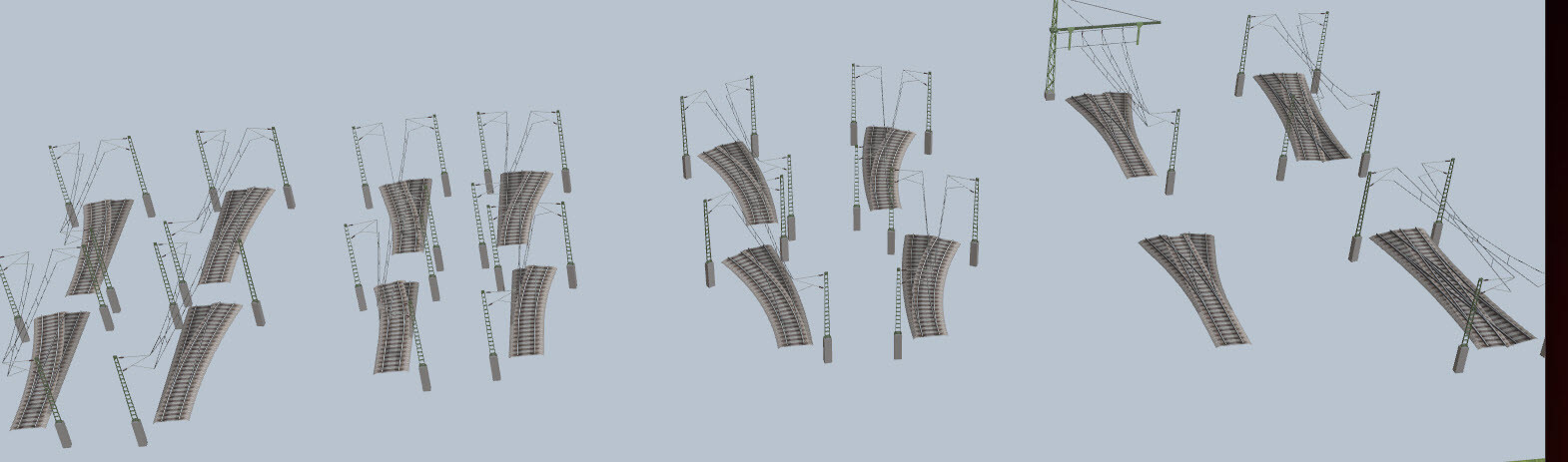
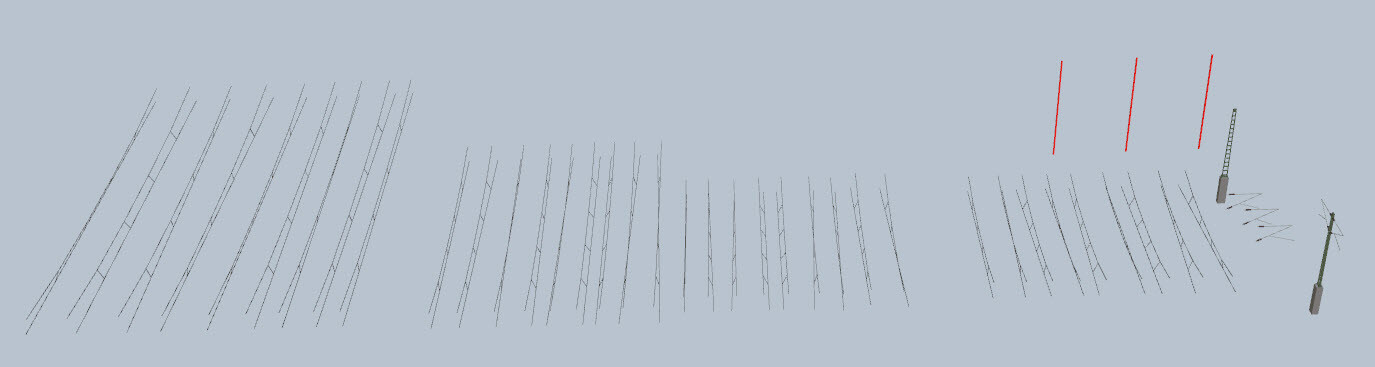
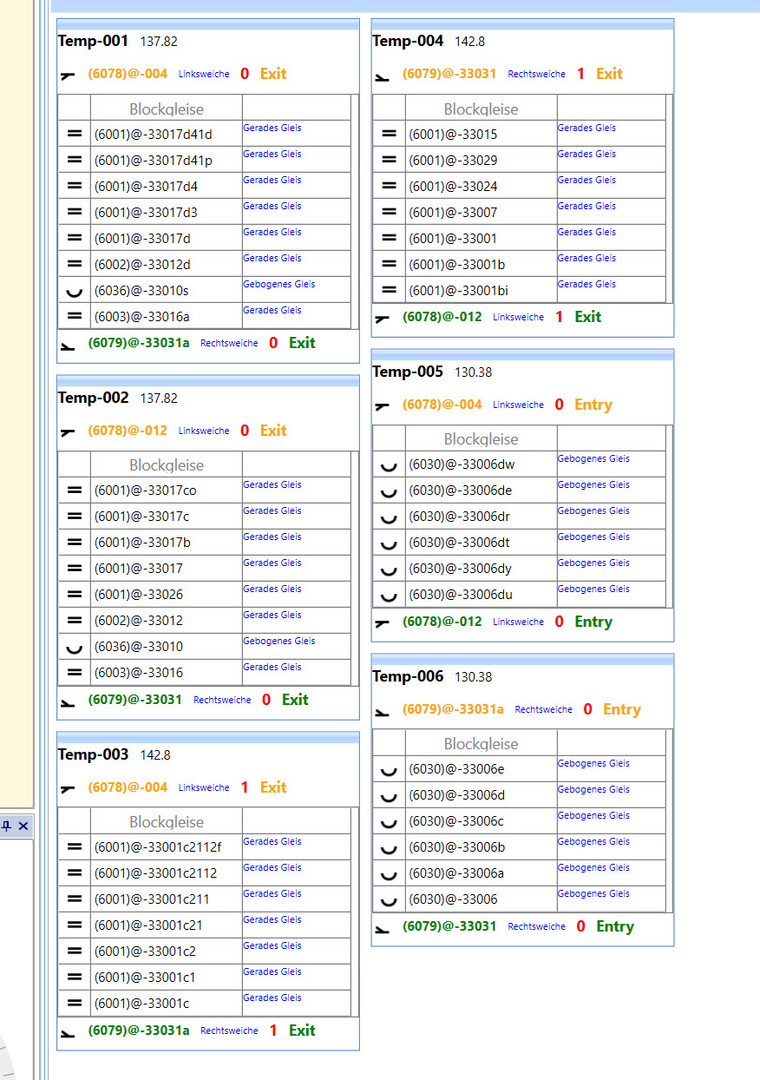
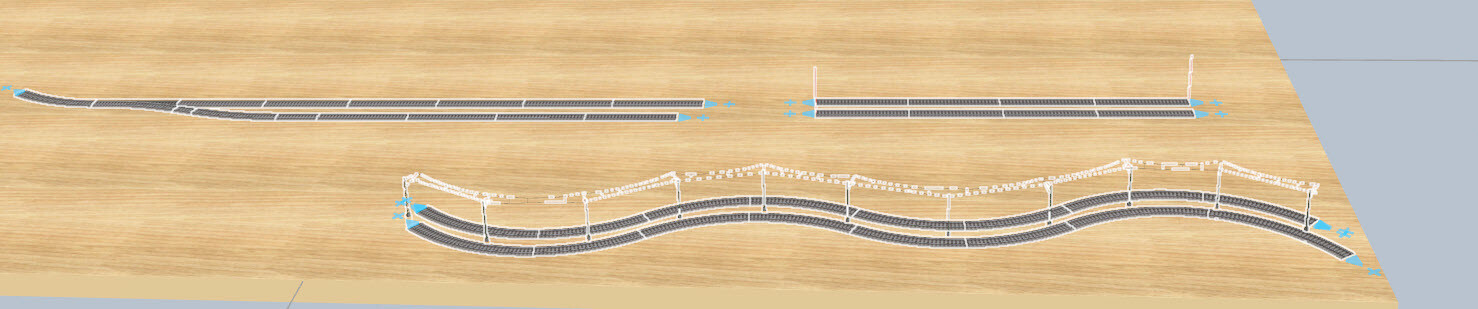
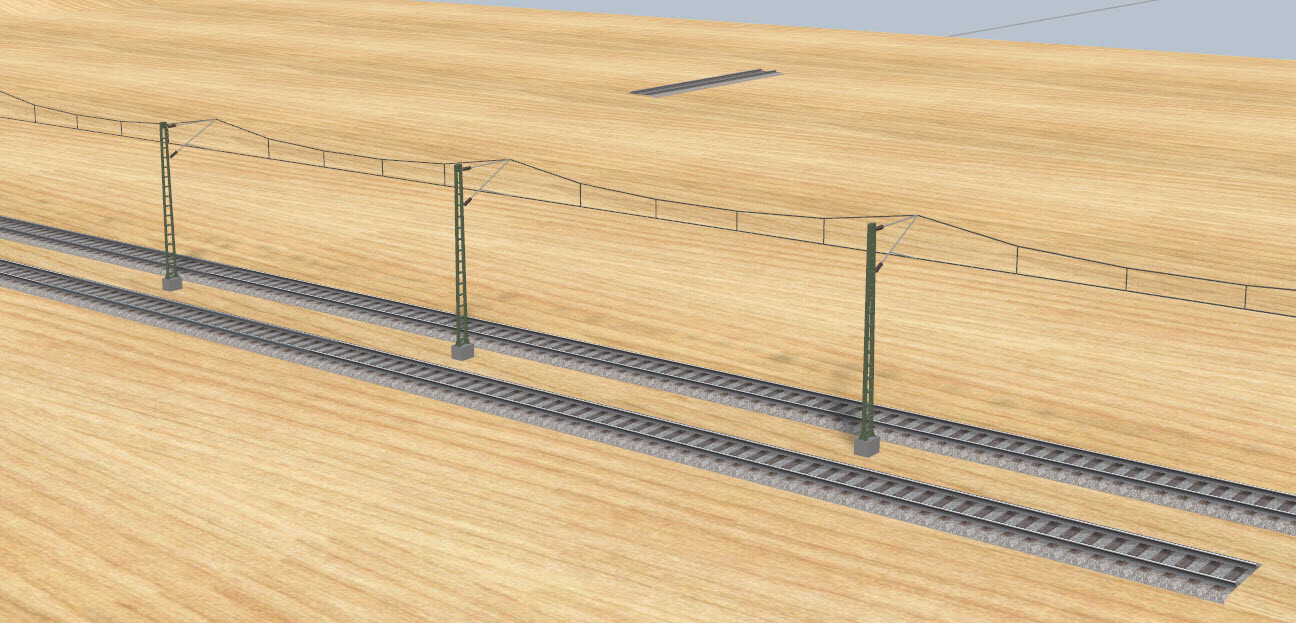
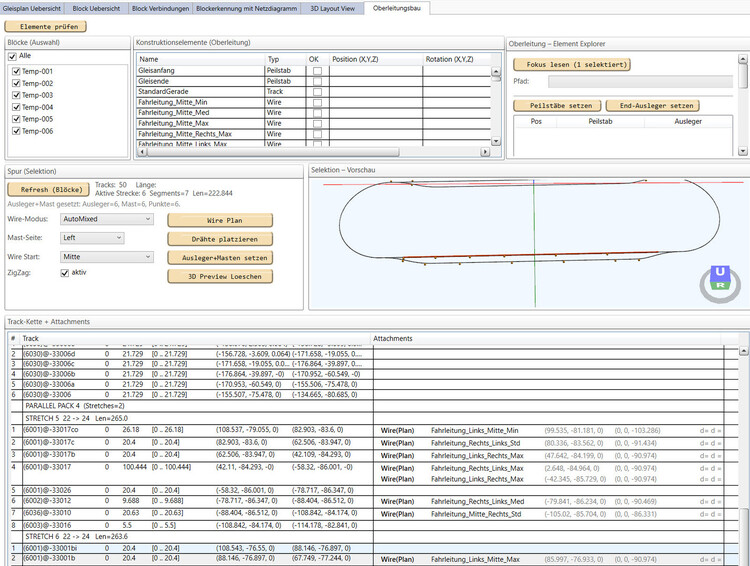
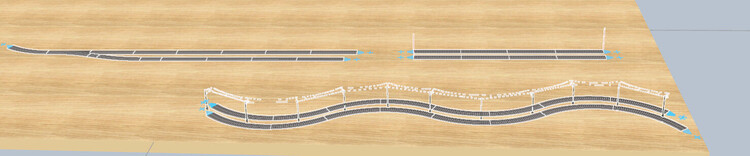
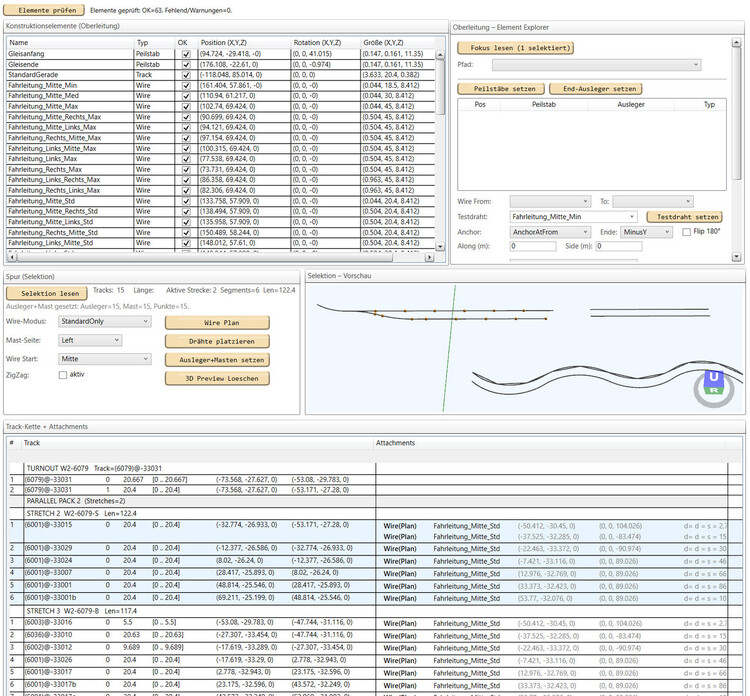
Hallo, hoffe alle sind gut gerutscht Habe mein "Testlabor" erweitert und kann strecken, die ich bearbeiten will darstellen inclusive mastpositionen. Die software erkennt jetzt parallele strecken und weichen (turnouts), und ich bin jetzt dabei die mastpositionen fuer parallele strecken auszurichten, und zwar nicht nure fuer 2 strecken sondern fuer n, da die fahrtdrahtverbindungen auf einer linie liegen sollen um quertragewerke zu verbinden. Das geht hand in hand .. Ich habe verschiedene plazierungstragien implementiert und getestet und der naechste schritt is diese strategien jetzt je nach situation automatisch auszuwaehlen und anzuwenden. Jedes stueck track zwischen weichen wird als "Stretch" (Strecke) erkannt und gelistet und kann einzeln angewahlt und bearbeitet werden oder auch mehrere koennen automatisch plaziert werden. Ich habe nicht vor alle sonderfaelle zu erschlagen und das ganze vollautomatisch zu machen, was ja sowieso nicht funkltionieren wurde, da ich die drahtlaengen nicht veraendern kann. Ich habe noch ein paar stunden fuer diesen teil geplant, bis ich zu einem sinnvollen stand komme, und dann kommt das naechste kapitel. Im uebrigen, die grundelemente, also erkennen von strecken, parallele strecken us. kommen von meiner blockerkennung und den 3d view hatte ich ja schon fuer den gesamten gleisplan. Damit is dann auch die einteilung in bloecke, elektrisch oder nicht, mehr oder weniger erledigt. The oberleitungssegmente werden abgespeichert und koenen bei bedarf ein und ausgeplendet werden, wahrend der konstruktion oder auch waehrend des betriebs. Teststrecken Ein screenshot des "labors" gruss und Happy New Year gmd
-
Hermann, hatte mal einen blick auf deine anlage geworfen und ganz ehrlich, weiss gar nicht so recht womit ich anfangen soll. Ist a bit of a mess .. Also was ich vorschlagen wuerde, um allen beteiligten etwas zeit zu sparen, warum schreibts du nicht mal kurz in pseudocode was du wirklich tun willst. A) nenne relevante punkte - kontakte B) definiere was an jedem punkt passieren soll, nicht wirklich wie es passieren soll, also nicht schlagwort oder was auch immer Ganz grob die bedingungen und reaktionen .. dann kann man deinen code viel besser zuordnen und erklaeren warum das so nicht geht. Gruss gmd
-
Never, mate.. Go for it, wie wir hier sagen .. Hoere mir alles and, muss es ja nicht tun.. Gruss gmd
-
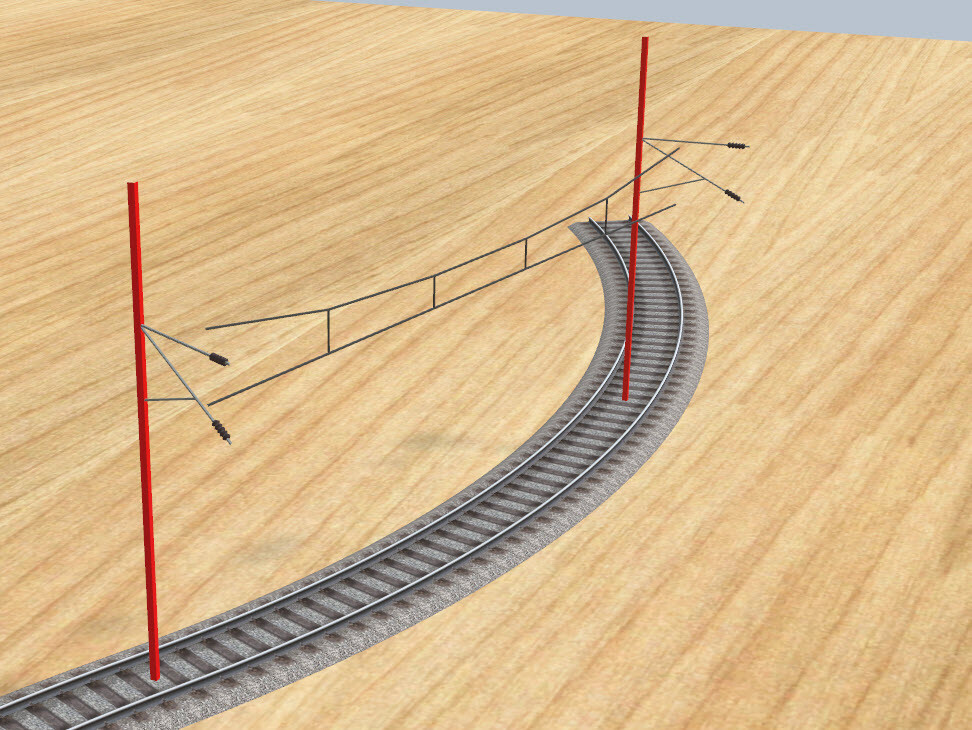
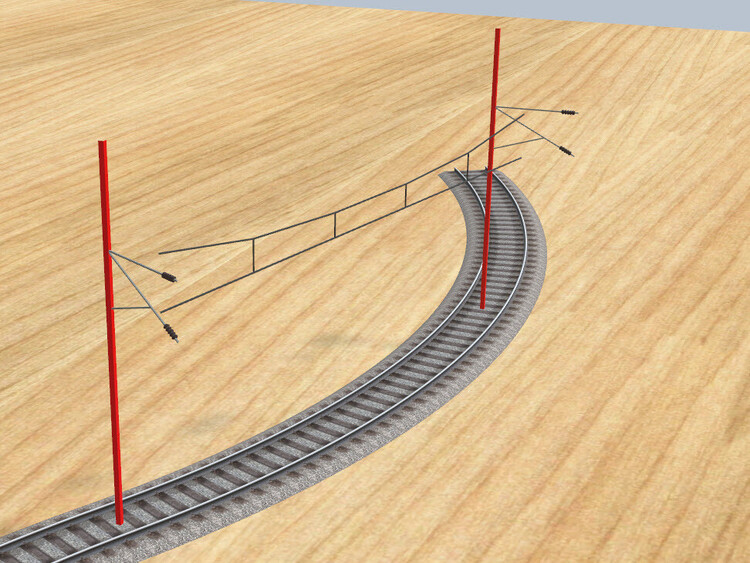
Hallo, mein "Oberleitungslabor" is weiter gewachsen und erzeugt jetzt kurvenstrecken mit kettenversatz zur optimierung des schleifekontaktes. Ist immer noch sehr knapp, aber das lasse ich so. besser etwas mehr abstand und knapper schleifer. alledings kann man das beinflussen durch die laengen der bereitgestellten draehte. Falls ich jemals die laenge einstellen kann, dann ist das halt ein parameter. Als naechste kommt die parallel strecke, das argument von BahnLand. Weichensets mit passenden draehten werden gebildet und vorgehalten. danach kommt die integration von geraden und gebogenen strecken mit weichen. Wenn das gemacht is .. gehe ich and die quertragewerke. Gruss gmd PS: hier das filmchen dazu: Plazierungsmovie mit Hektometer tafeln fuer Waterman :)

-
Ralef, Keine ahnung von deinem Loconet aber das macht auch nichts fuer den ansatz den ich waehlen wuerde. Zunaechst einmal mach eine liste von elementen im bahnhof mit ihren aktionen, die du mit deinme gbs ansteuern willst. Schau dir die EV im studio an, oder besser mach dich mit Lua und den steuermoeglichkeiten vertraut. Fuer jede aktion und element baust du dir eine Lua funktion. Jeder dieser funktionen bracht einen trigger/adapter (Lua), den du dann ansteuerst. Mit der externen schnittstelle (siehe WIKI) kannst du commandos in form von Lua scripten senden und ausfuehren. Damit kannst du deinen trigger/adapter ansteueren, die dann die adressen umsetzen in deine elementarfunktionen. Das waere mein ansatz. Gruss gmd
-
Da hast du wohl recht, ist auch nicht meine absicht, wir wollen ja nicht dass alles gleich aussieht, die individuelle ausrichtung einer anlage ist ja der reiz. Ich suche halt nach der nagelmaschine wenn der hammer nicht ausreicht, will aber keine kuchenform erzeugen, wo am ende alle gleich aussehen und vielleicht nur ein bischen anders schmecken. Alexanders anlage, mit den schlanken weichen und grossen radien sind anders zu behandeln als meine die ich meist mit Fleischmann und kleineren radien baue. Da bleiben einige strecken unter dampf oder diesel, weil der mastenwald wirklich nicht schoen aussieht. Anyway .. lass die ideen fliessen .. ich bin immer interessiert an anregungen. Gruss gmd
-
Sorry, habe vergessen zu sagen, wenn du noch weitere "Besonderheiten", Regeln, Stolpersteine siehst.. bin dankbar fuer jede anregung. Gruss gmd
-
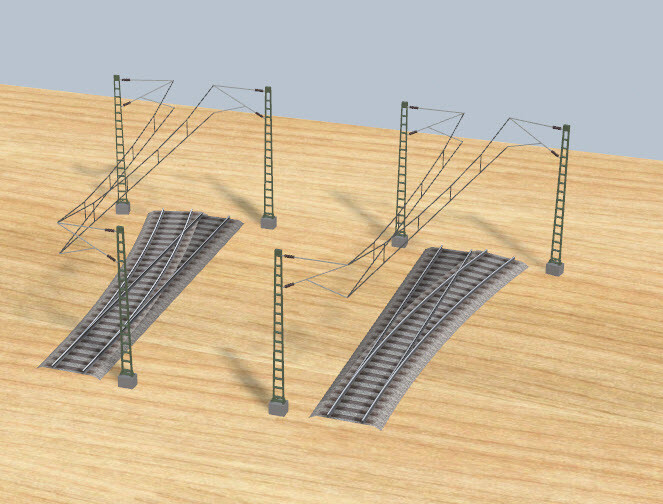
Hallo, Hier sieht man gut dass auch ein versatz der kette bei bestimmten radien auch nicht ausreichend fuer den schleifer ist. Ich bin jetzt dabei die abhaengigkeit von radius zu spannlaenge zu veranschaulichen, und dann die maximumlaengen per radius festzulegen. Dann kommen die weichenueberspannungen und sonderfaelle. Ich habe meinen testaufbau erweitert und kann auch beliebige strecken mit 4 endpunkten erkunden. Die haenger und draehte kann ich interaktiv aendern und der draht is ausgerichtet als waere er lange genug zwischen den haengern. Gruss gmd

-
Das ist vom berechnen ueberhaupt kein problem, das problem liegt im anpassen der drahtlaengen, und da wird man wohl eingreifen muessen. Auch rohrausleger usw zu integrieren ist kein problem, es ist einzig und allein die drahtauswahl und laenge, daher mein angebot and Neo. Gruss gmd
-
Es gabe einmal ein plugin das masten gesetzt hat nachdem muster, das du hier erwaehnst. Ich hatte mal einen versuch mit dem ich eine tracer lock ueber eine strecke fahren lasse um bloecke usw. zu erkennen. Das funktioniert nicht wirklich, da du meist den kontext (weitblick) nicht hast. Ich habe dann umgestellt einfach die gleisgeometry einzulesen und die komplette anlage zu erkennen und zu zeichnen und dann zu analysieren. Das will ich teilweise fuer die oberleitung verwenden.. Es ist im grunde nur eine frage des datenmodells und der regeln, das zu loesen .. vieles ist natuerlich auch geschmacksache, das ist ok, und man kann auch teilloesungen anstreben. Also zum beispiel peilstaebe fuer vorhandene quertragewerke setzen und automatisch haenger ueber den gleisen plazieren. Es gibt viele kleine hilfen fuer oft zeitraubende manuelle taetigkeiten. Ich bin natuerlich eingeschraenkt mit den moeglichkeiten des MBS uber die schnittstelle, aber auch vorplazierte element bei denen ich nur noch einen draht verlaengern muss da er schnon richtig sitzt ist auch ok. Perfekt wird die loesung sicherlich nicht sein, aber wie du schon ageregt hast, schilder zu integrieren usw., spart schon eine menge konstruktionsaufwand und man kann noch sehr viel mehr zeit in details stecken, wennn solche routinearbeiten erledigt werden. Ich will nicht den "Bauspass" beseitigen, sondern erhoehen, dadurch dass man nicht mit sovielen kleinigkeiten kaempfen muss, und eine oberleitung ist nun mal aufwand. Und vielen dank fuer die vielen anregungen. Gruss gmd
-
Danke, bei Maerklin hatten wir ein stueck fuer die kreuzungsweiche in der oberleitung, das war ja auch nicht vorbildgerecht. Ich bin in der hinsicht kein pedant, solange es zweckmaessig ist und einigermassen gut aussieht ist das ok.. viele leben ja auch mit gebogenen fahrdraehten . Gruss gmd
-
Hallo, kann mire jemand bitte ein beispiel der ueberspannnung einer kreuzweiche geben ? oder einen link zu einem thread ? habe die beispiele durchsucht, nichts wirklich brauchbares gefunden. Gruss gmd
-
Hallo, habe mir ein testbett gebastelt, wo ich einzelne ueberspannungen ausprobieren kann und laengen festlege mit sicherer abdeckung des stromabnehmers. Kann mit verschiedenen variationen der verwindung testen, mit kurzen und langen auslegern. Die ergenisse kann ich als fallstudien aufheben und dann im konstruktionsbetrieb aufrufen. Auf diese weise versuche ich optimale laengendefinitionen zu finden, da ich ja die laenge nicht dynamisch einstellen kann. Der ein oder andere manuelle eingriff wird da nicht ausbleiben. Gruss gmd

-
Hallo Neo, wie du ja sicher gelesen hast bastele ich an der oberleitung. Es macht forstschritte und ich bin optimistisch, dass ich eine recht gute, vielseitige loesung produzieren kann. ABER: Zwei dinge machen die loesung wirklich umstaendlich und nicht wirklich vollstaendig fuer viele faelle. Hier mein angebot: Gib mir die moeglichkeit variationen ueber die schnittstelle auszuwahlen UND splines in der laenge setzen zu koennen. Nur die laenge keine verwindung usw. Das gilt fuer fahrdraehte und quertragewerke. Alles andere is ok. Hier mein angebot: Wenn du in irgendeiner version diese beiden features einbauen kannst, dann mache ich aus dem oberleitungsbau ein plugin fuer alle verwendbar. Das ist herausloesbar ohne den overhead meiner anderen funktionen. Sag mir ob du prinzipiell interesse hast, dann versuche ich meinen code moeglichst isoliert zu halten von dem rest der umgebung. Zeitlich ist mir das egal, wann immer, und wenn nicht ist auch ok, aber das derzeitige vorgehen mit vordefinierten objekten zum clonen macht keinen sinn fuer allgemeine verwendung. Ist ok fuer mich, aber nicht fuer ein plugin. Gruss gmd
-
Einige parameter eingefuehrt zum testen der zig zag draehte Das funktioniert soweit, die elementaren kalkulationen sind gemacht, jetzt muss ich ueber weichen und parallele strecken nachdenken, die kurven bereiten mit nicht soviel schwierigkeiten wie eine verzweigte weichenstrasse ohne quertragewerk .. naja mal sehen wie weit ich komme. Genug fuer heute Gruss gmd

-
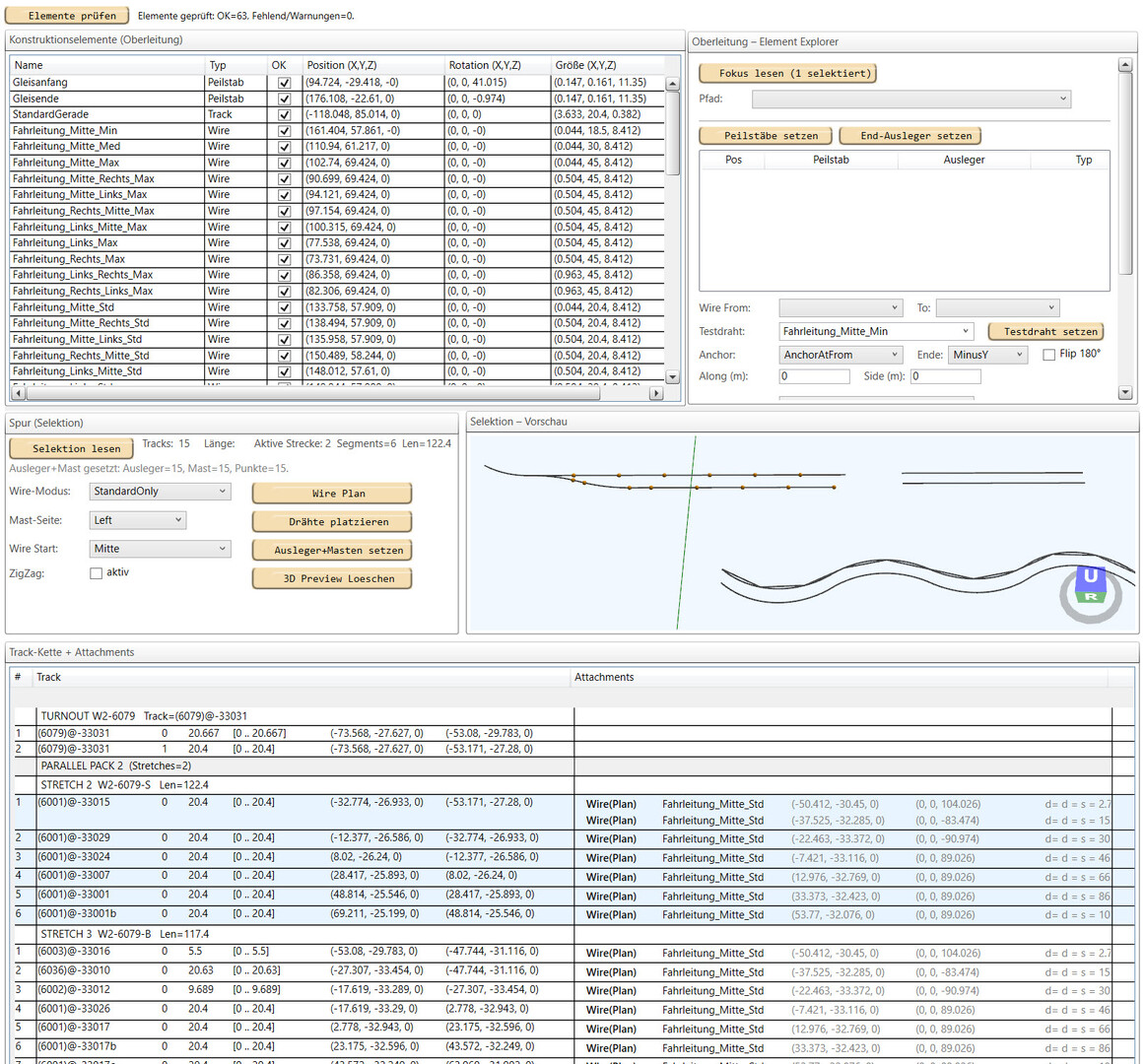
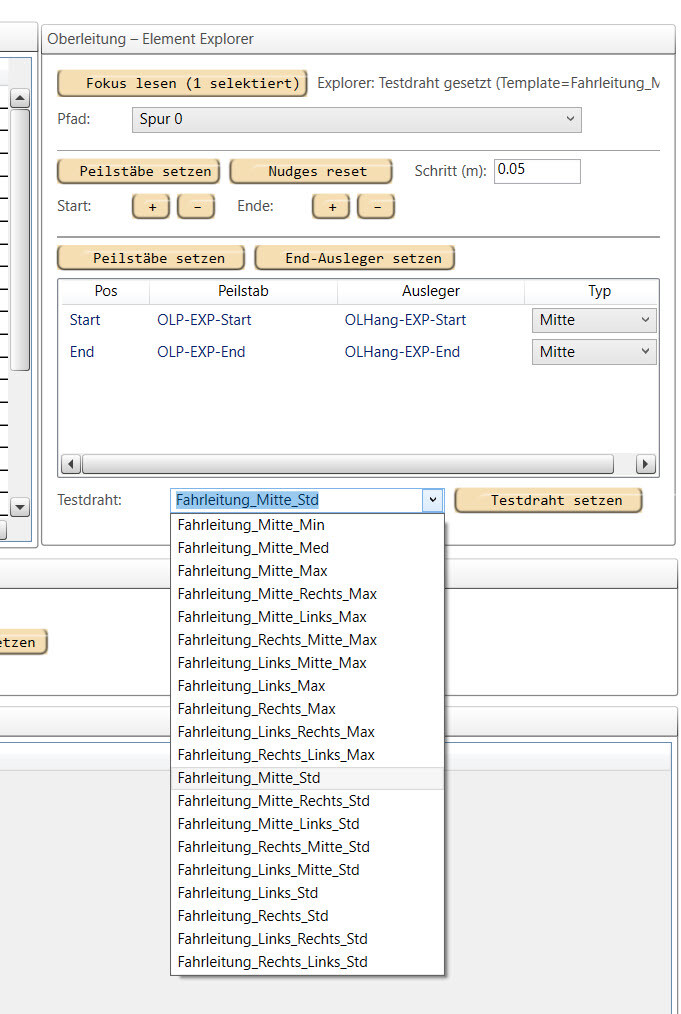
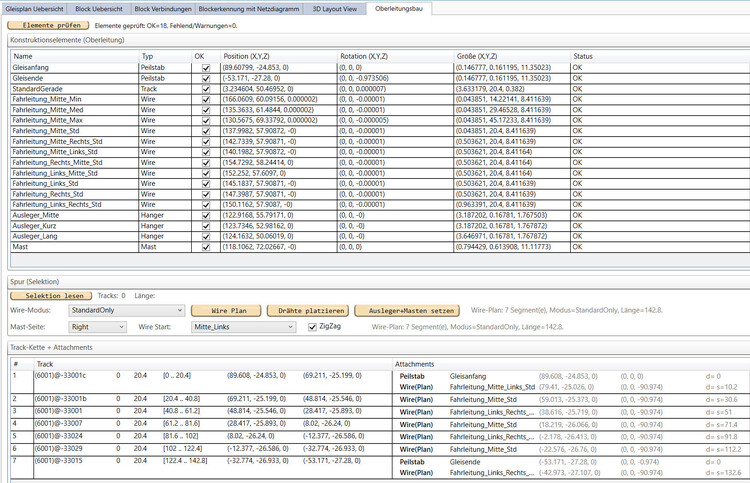
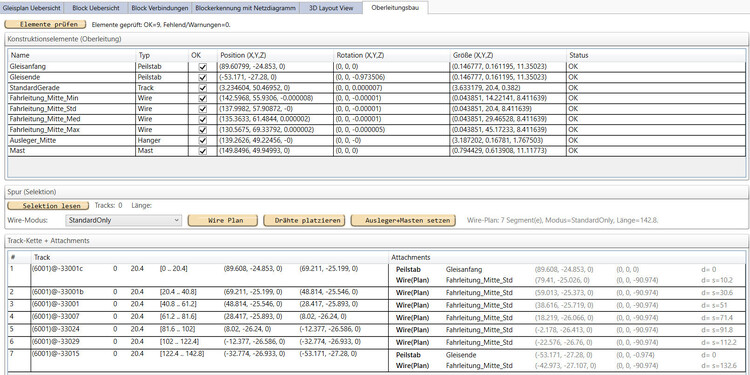
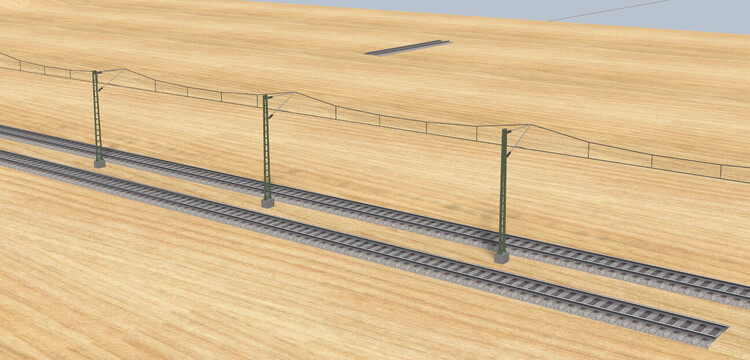
Hallo nochmal, der erste schritt fuer die oberleitung ist gemacht. Wie Waterman vorgeschlagen hat, habe ich erts mal ein paar elemente bereitsgestellt. 4 draehte min,standard,medium und max und ein haenger und ein mast .. alles gerade und mittig als anfang Habe mir eine testumgebung gebaut, in der ich alle datane anzeige und kontrolle habe was passiert und werde jetzt stueck fuer stueck die plazierungsstrategien angehen. Hier pruefe ich erst mal ob auf der anlage die notwendigen bautaile vorhanden sind. Die links und rechts draehte muessen ja als variationen angelegt werden und koennen nur ueber namen gecloned werden. Das kommt als naechstes. Ich habe verschiedene "Wire Plans" die je nach context verwendet werden, hier zunaechst "Standard"> Im bild sieht mna, dass die masten auf der falschen seite sitzen, dafuer habe ich noch keinen parameter und da ich derzeit nur eine strecke einlese, erkennt das programm noch nicht die parallelstrecke. Das kommta ber alles, da ich ja die komplette streckenerkennung fertig habe . Hier entwickele ich nur die grundelemente fuer den oberleitungsbau, die dann auf das gesamtmodell angewendet werden. Ich habe vor auch quertragewerke, zumindest teilweise zu automatisieren. Wie ich schon mehrfach sagte, allmaehlich kommt alles zusammen, da ich alle prinzipiellen programmteile schon mal verwendet und getestet habe, so sind jetzt die weiteren dinge ableitungen. Allerdings bleiben immer noch viele aspekte zu erledigen, es sind einfach viel features, die ich noch vorhabe einzubauen. Die landschaftsgestaltung, die oberleitung und die steuerung sind einfach zeitraubend bei groesseren anlagen oder vielen anlagenteilen. Gruss gmd
-
Plazierungen.pdf Hallo, habe die plazierungsfunktionen soweit abgeschlossen. Die ergebinsse werden noch nicht gespeichert, nur die presets. Das abrufen von objektclustern fuer unterschiedliche verwendungen kommt noch. Die filter sind ja sweit auch fertig. Anbei ist das handbuch. Nicht korrektur gelesen, nur ein paar bildchen hizugefuegt. Der text kommt direkt vom AI, und dient fuer mich als erinnerungsstuetze. Als naechstes kommt die oberleitung dran. Gruss Gmd
-
Hallo, bei der Hecke war es noch einfach eine kurve zu erzeugen, man kann einfach ueberlappen, aber mit anderen objekten ist das schwieriger .. Mit dem bauzaun muss man schon etwas genauer plazieren, aber das geht jetzt auch. Sind ne menge parameter geworden, hatte versucht das komplett automatisch zu machen, das hat aber einige faelle verhindert. Mit parametern muss man zwar etwas mehr einstellen aber man kann variationen besser nutzen, also auch zufaellige abweichungen erzeugen usw. Ich habe ja presets die ich abspeichern und wieder abrufen kann. Die kann ich dann als grundlage verwenden und variationen leichter erzeugen. Gruss gmd


-
Guter hinweis, danke .. ich muss ja auch die variationen der fahrdraehte vorhalten da ich sie nicht abrufen kann, alle die gleiche guid, finde ich halt immer noch schrecklich antiquarisch, dass man die variationen nicht abrufen kann und so versteckt. Nun ja ich werde es nicht aendern koennen also muss ich mich darauf einstellen. Ich habe die tutorials von Roter Brummer sorgfaeltig studiert und bin dabei musterstrecken fuer mich aufzubauen, die ich meist verwende. Ich denke nicht dass ich jeden fall erschlagen kann, aber zumindest die ide ich am meisten verwende. Ich mag halt auch gerne anlagen bauen, aber die vielen wiederholungsarbeiten nerven mich, dazu bin ich zu ungeduldig und ergebnisorientiert, zuviel kleinarbeit. werde erst mal einfache beispiele ausprobieren, und du hast recht, feste laengen vorhalten und damit ist auch die zuordnung zu radien und anstaenden vorgegeben, da braucht man nicht mehr viel rechnen. Danke fuer die antwort.. jedes stueck information hilft weiter. Gruss gmd
-
Hallo, irgendwo habe ich mal eine tabelle gesehen fuer maximale drahtlaenge zwischen auslegern bei gegebenem radius mit links/rechts verwindung, oder wie man das nennt. Kann mir jemand einen hinweise geben ? Ich bin dabei meine Oberleitungsplazierungsautomatik zu bauen (ist deutsch nicht eine schoene sprache haha) Gruss gmd
-
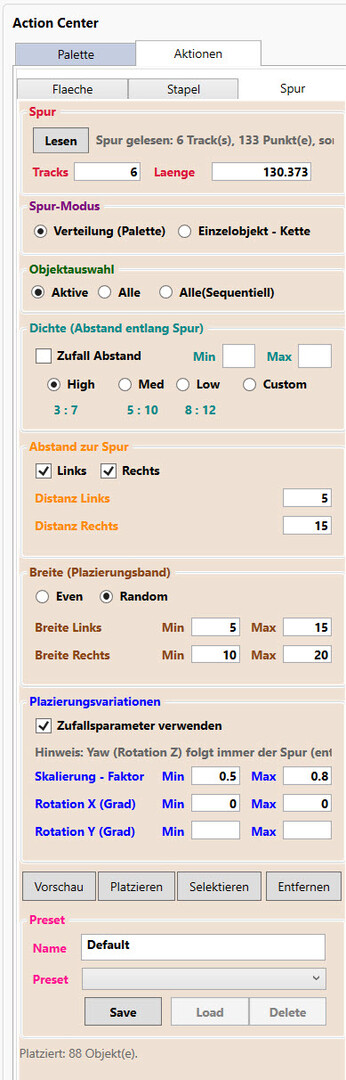
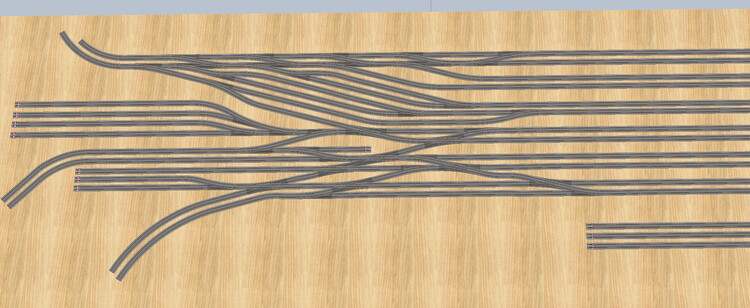
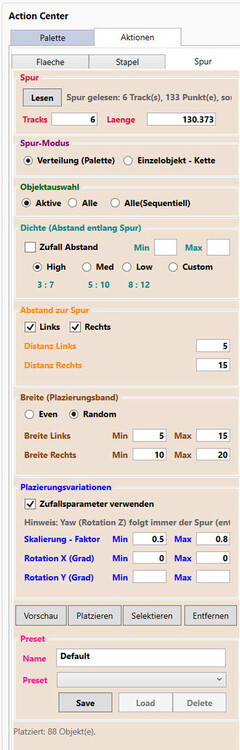
Hallo, hier die beiden varianten, positionieren entlang beliebiger spur von einer palette von objekten, oder einzelobjekte als kette. Es fehlen noch parameter, die ich noch ergaenze .. ich will die dichte links und rechts von kurven kompensieren. bzw. definierbar machen. dann ist das auch fertig. Und die rotationsparameter habe ich noch vergessen fuer die plazierung. Gruss gmd
-
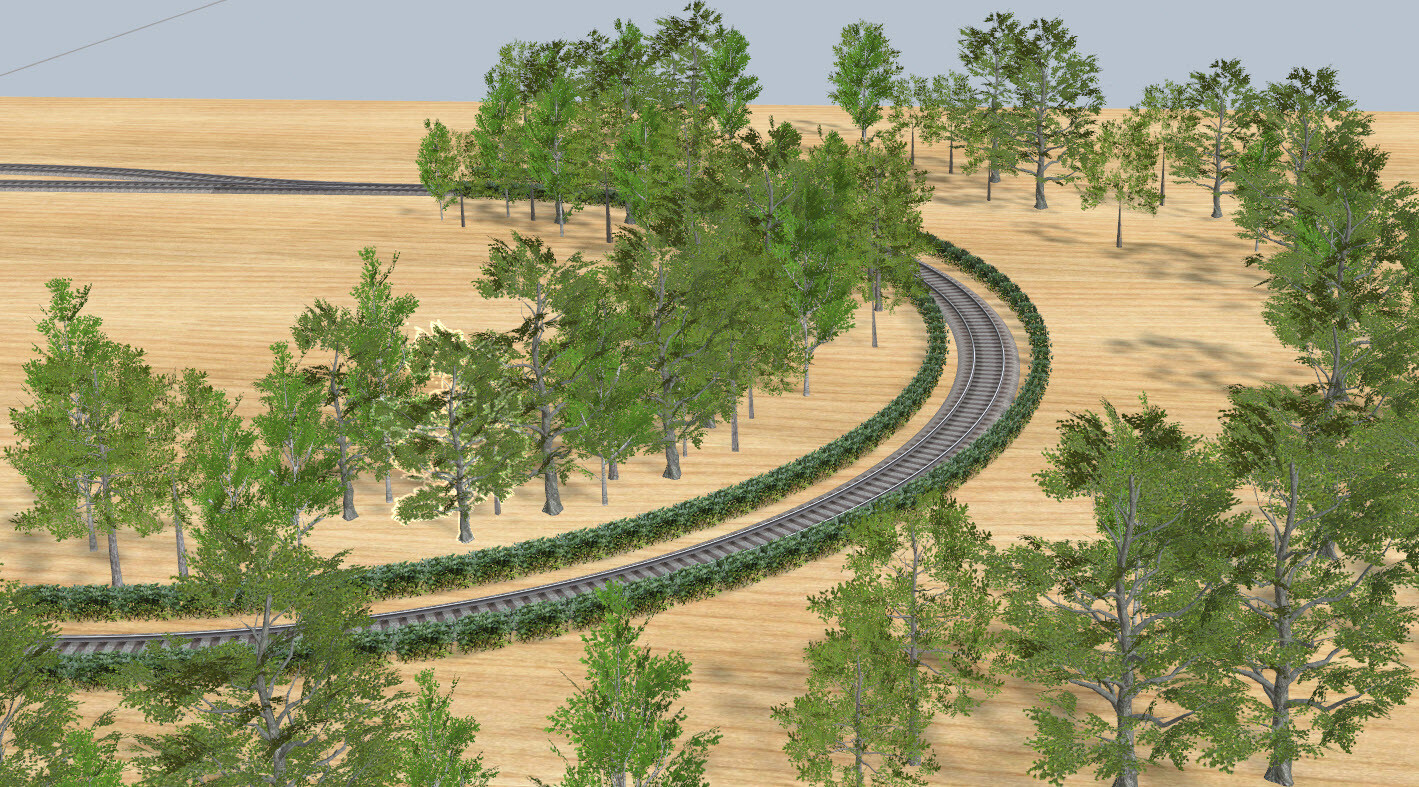
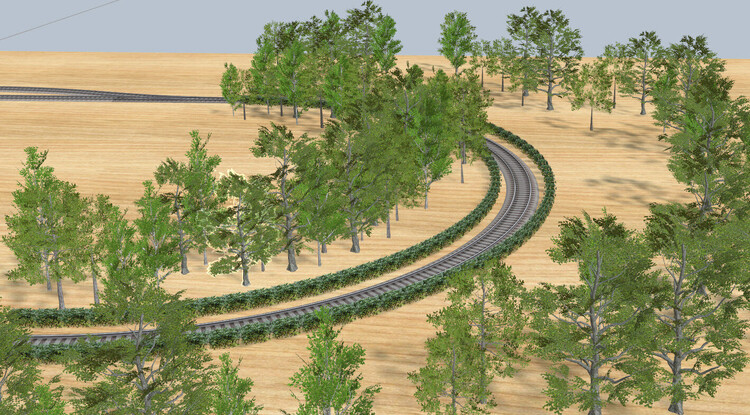
Hallo, erste versuche mit der automatischen bepflanzung entlang splines, noch nicht fuer hecken geeignet .. das kommt als naechstes. Gruss gmd