Hawkeye
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Hawkeye
-
Hallo, hier mal ein paar einfache Basismodule zum Testen. Basismodule V7.mbp Diese Module sind in V7 erstellt. Die Einrastpunkte habe ich auf die Unterseite verlegt. VG, Hawkeye
-
Nicht Module -> Bodenplatten!
-
Hallo @Klartexter, doch, du muß aber immer die Platte „opfern“, von der du die Kontur übernimmst. Deshalb schreibt Brummi ja 5 cm Überlappung. „Dann wird das profilierte Reststück über die numerische Positionseingabe um besagte 5 cm über die flache Platte verschoben und beide Platten verschmolzen.“ VG, Hawkeye
-
Hallo, interessant, was mein direkt an @Phrontistes gerichteter Beitrag wieder für Wellen schlägt. Ich wollte ihm nur zeigen, wie ER SELBST zwei nicht ganz zueinander passende Module richten kann. Wenn er sich schon Module aussucht, die aufgrund der unterschiedlichen Gleissysteme gar nicht passen können. Da mußt du, @Phrontistes, schon selber ran, wenn du dir solche Module aneinander legst und nicht die Modulbauer! Ich wollte weder @Roter Brummer noch @prinz eine Lehrstunde für den Bau von Modulen erteilen. VG, Hawkeye
-
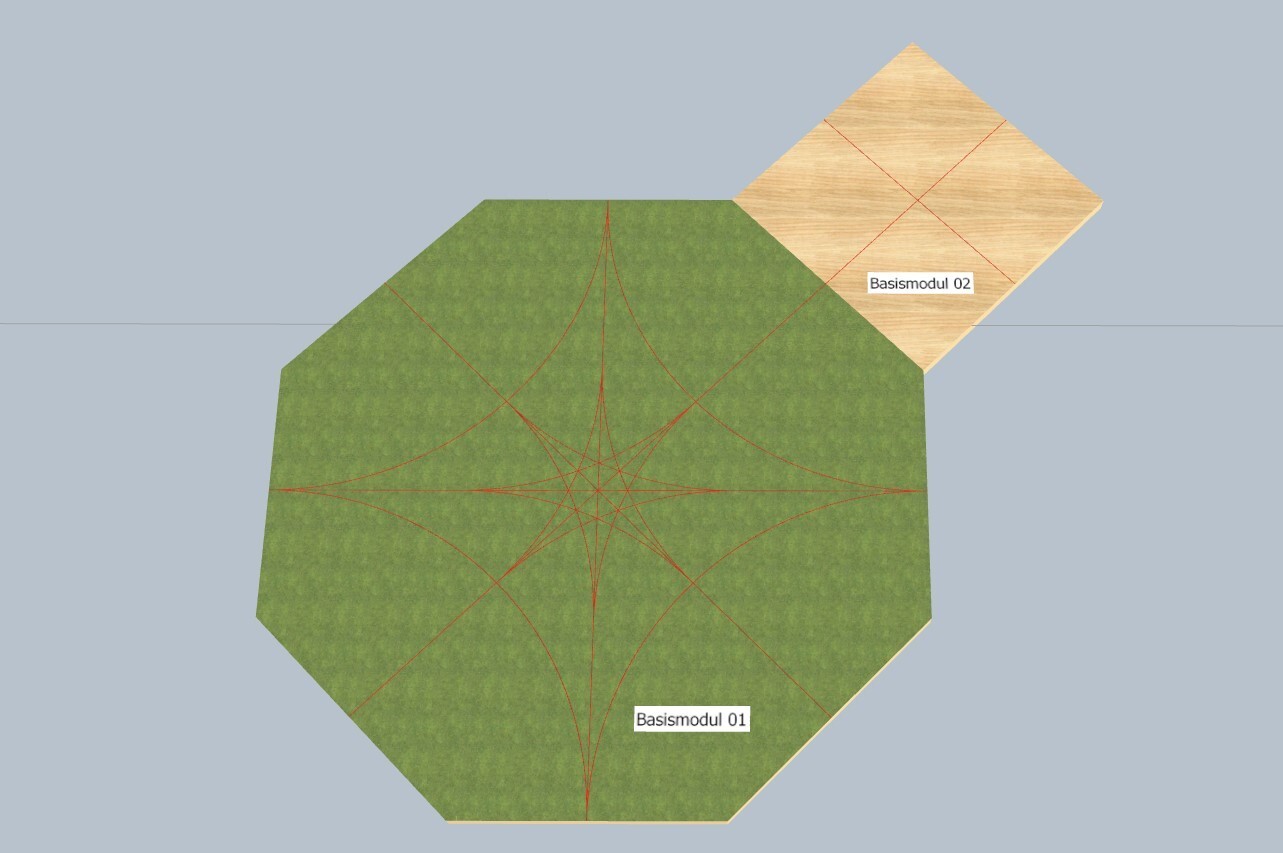
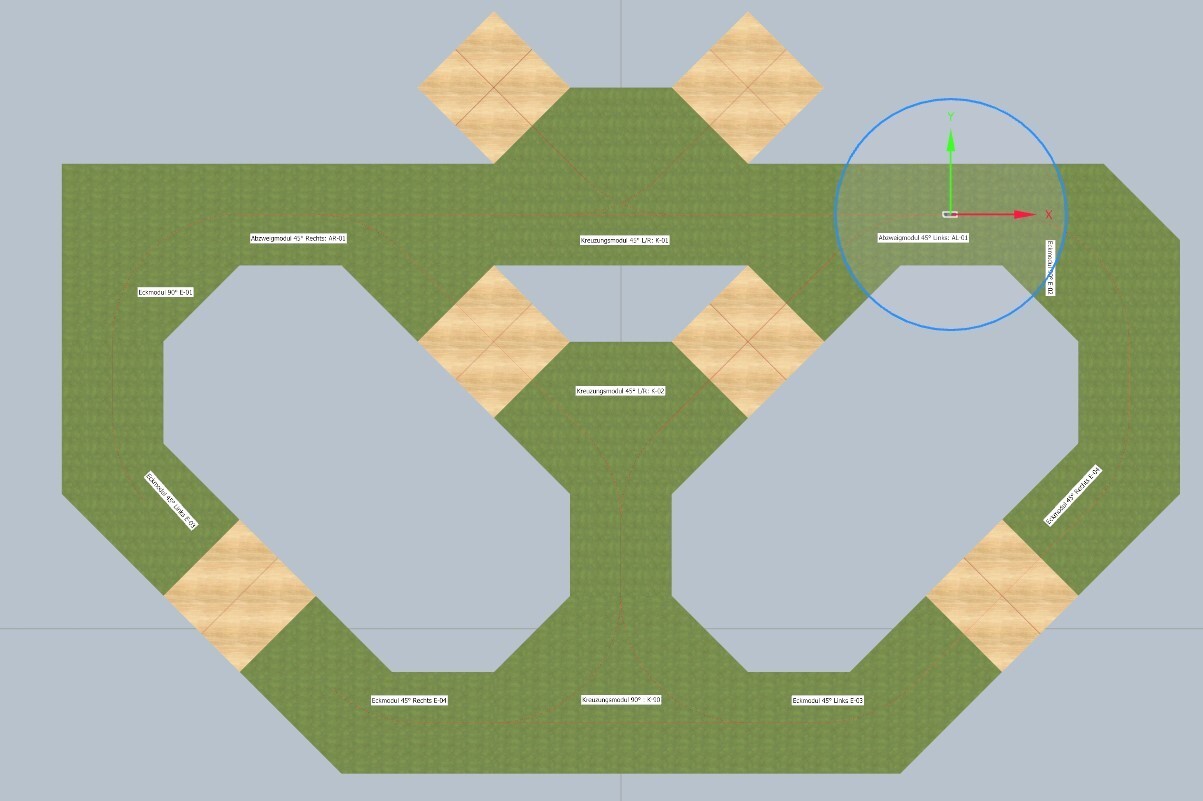
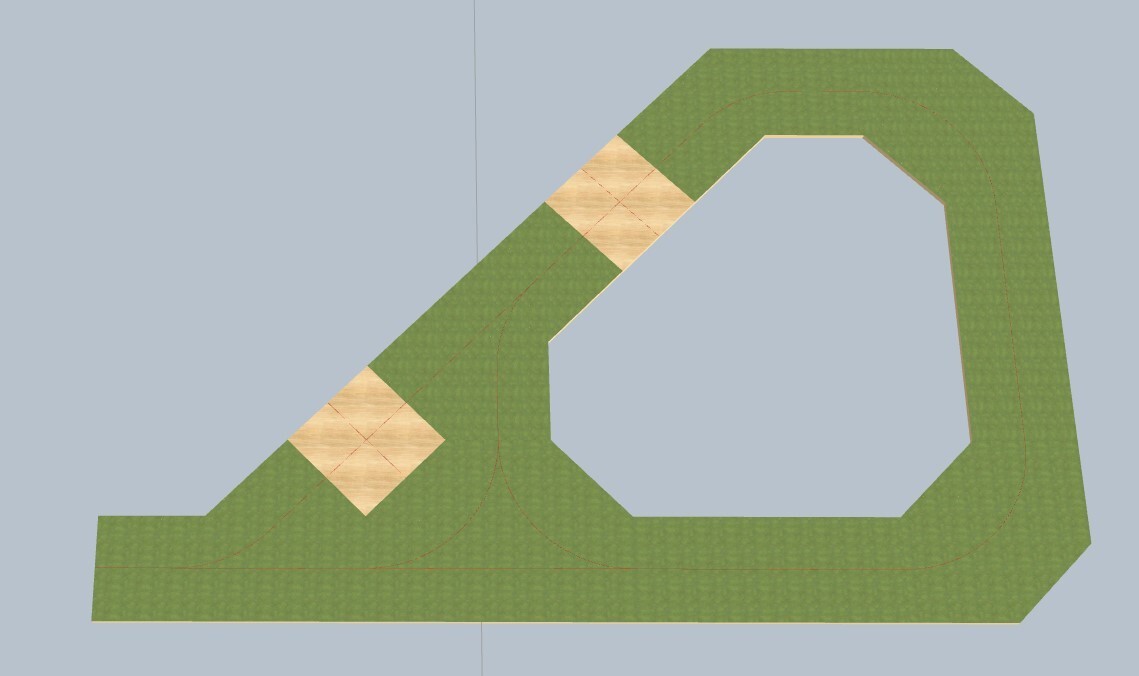
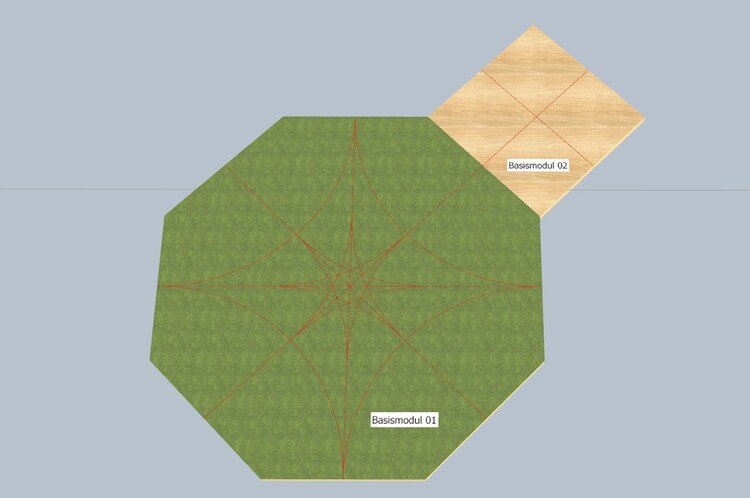
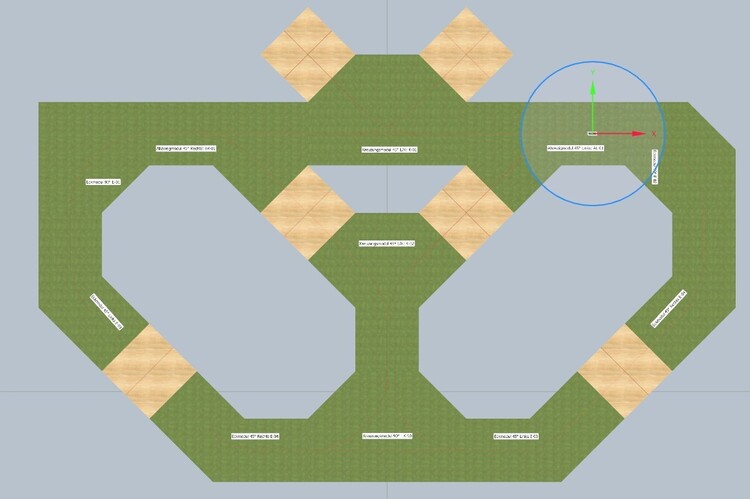
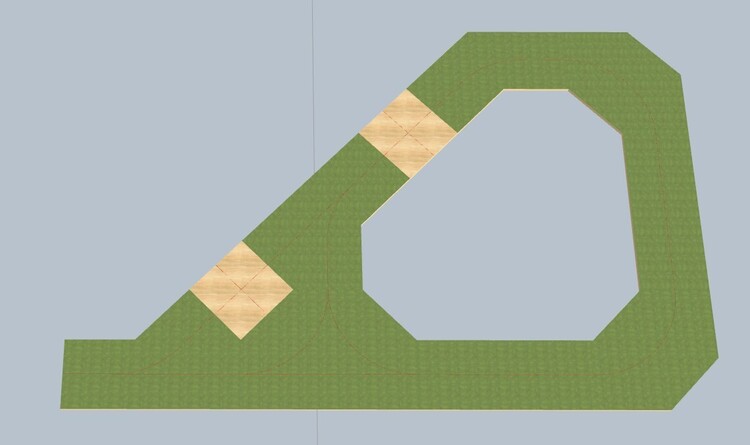
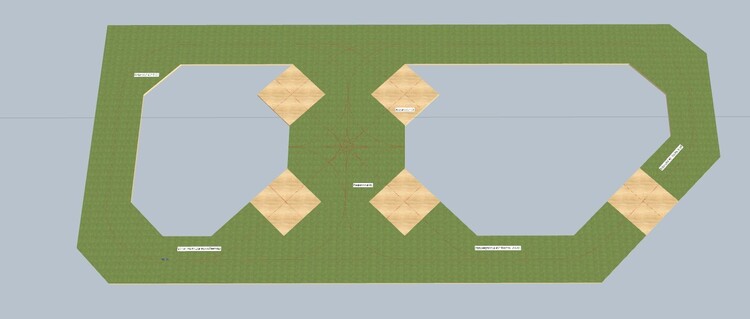
Hallo Zusammen, ich habe mir auch mal Gedanken darüber gemacht, wie man ein Modulsystem vereinheitlichen kann, so das auch alle Module zusammenpassen. Herausgekommen ist ein System aus nur 2 Basismodulen. Aus diesen beiden Basismodulen lassen sich durch Entfernen nicht benötigter Verbindungen und einfaches Anpassen der Kontur auf das Systemmaß, auch über die Diagonalen eine schier unzählige Anzahl von Einzelmodulen entwickeln. So das auch Anlagen in Kreisform gebaut werden können. Hier mal ein paar Beispiele: Ist es Wert, diesen Grundgedanken weiter zu verfolgen, oder besteht daran kein Interesse. VG, Hawkeye
-
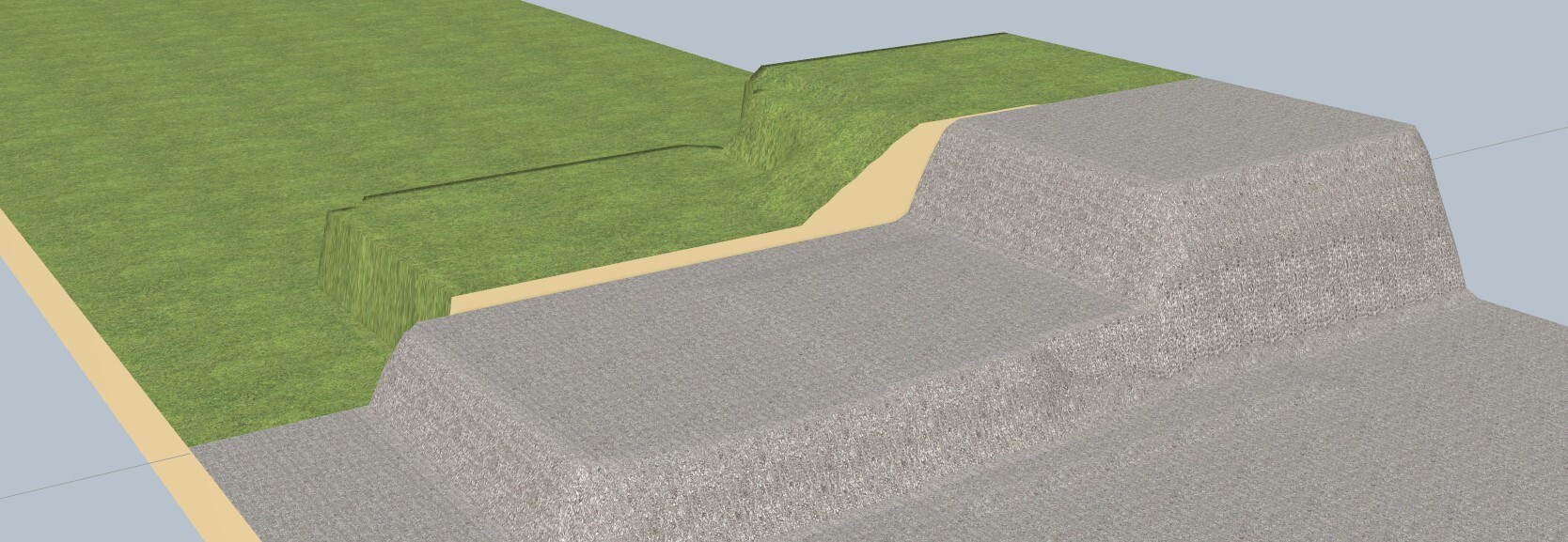
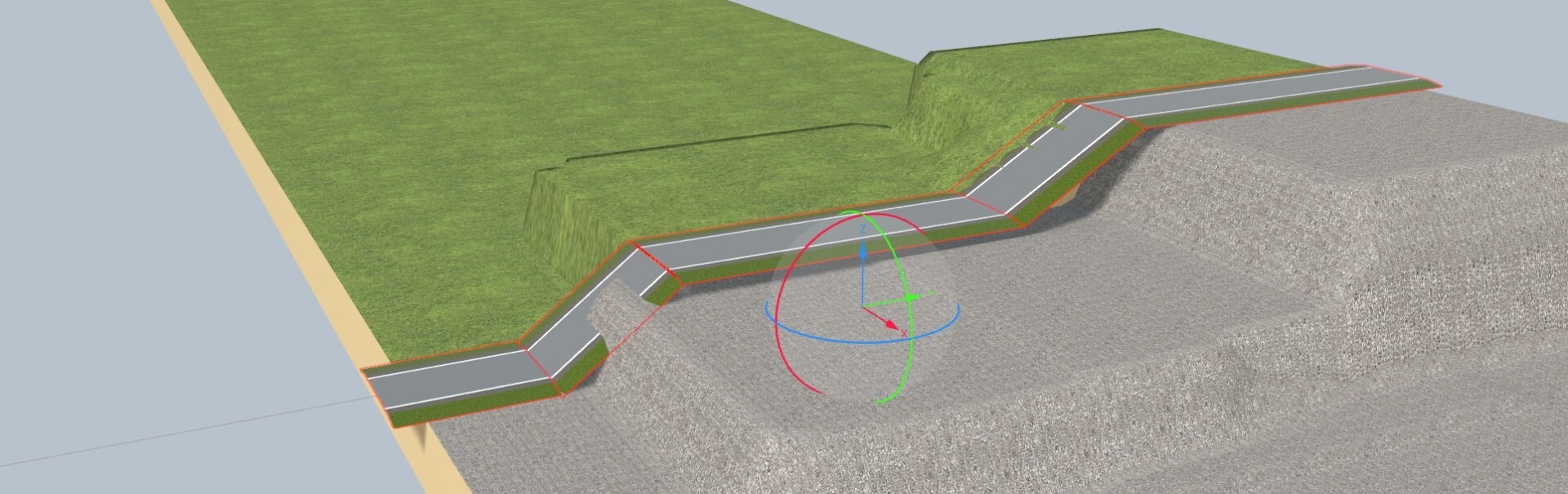
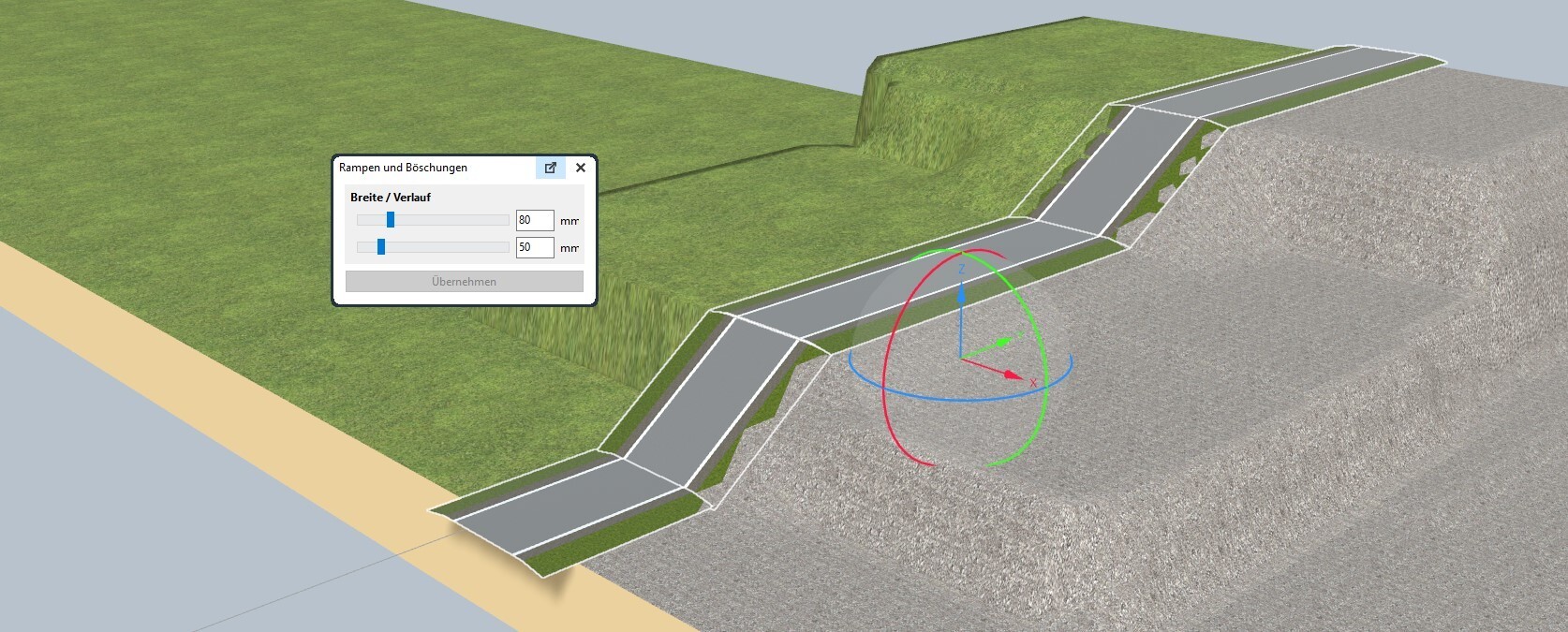
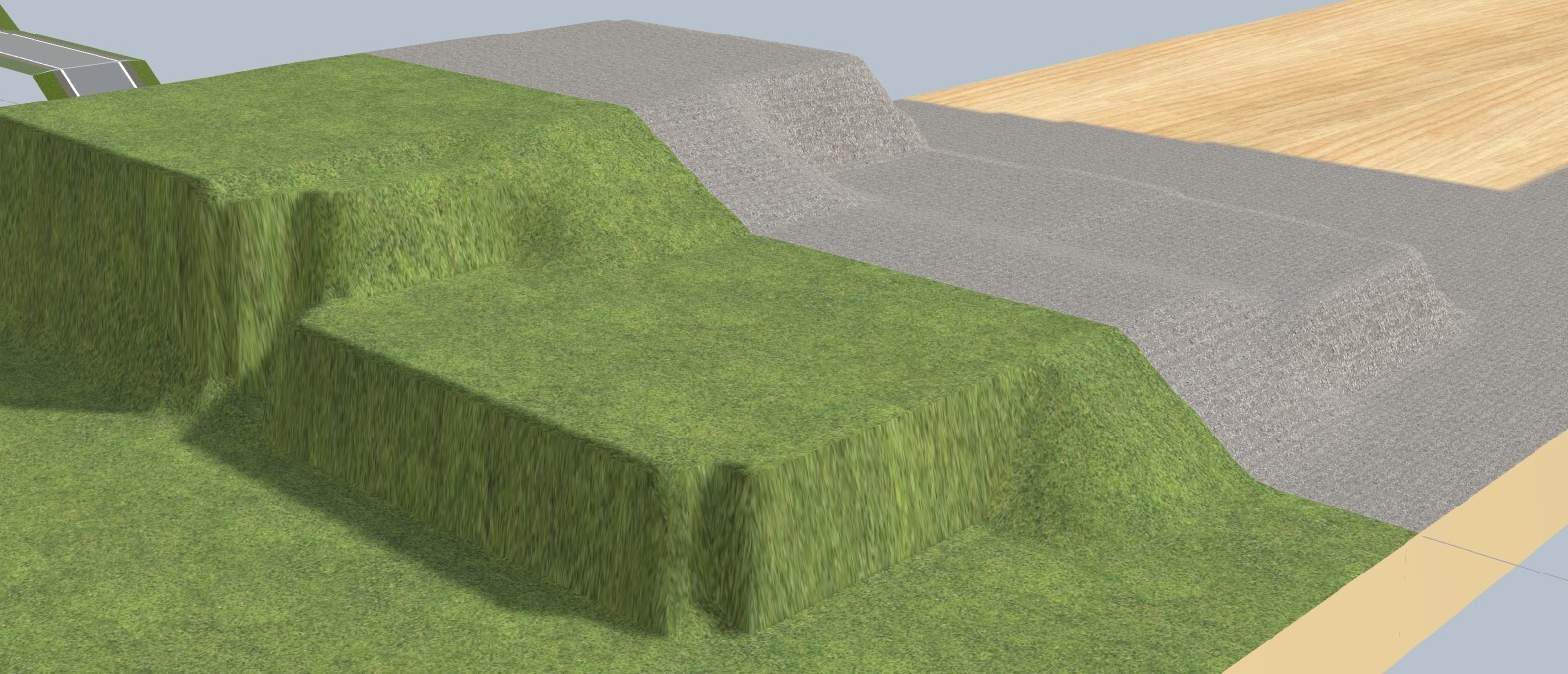
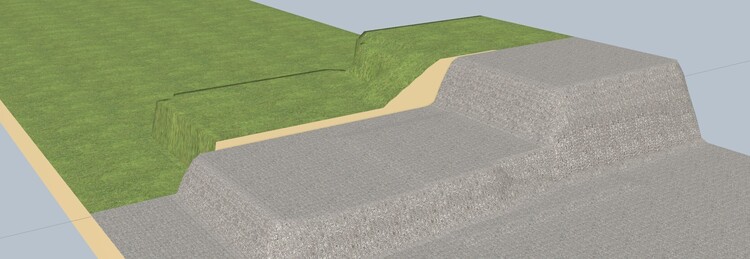
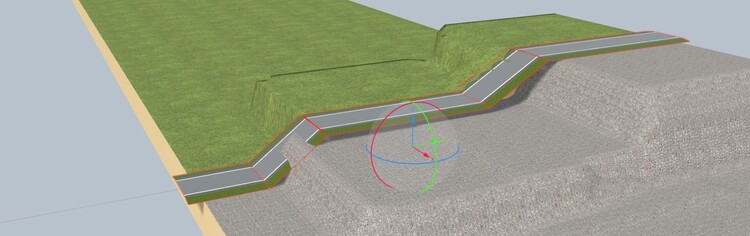
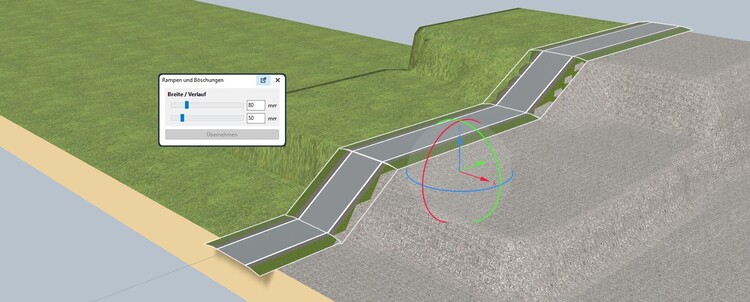
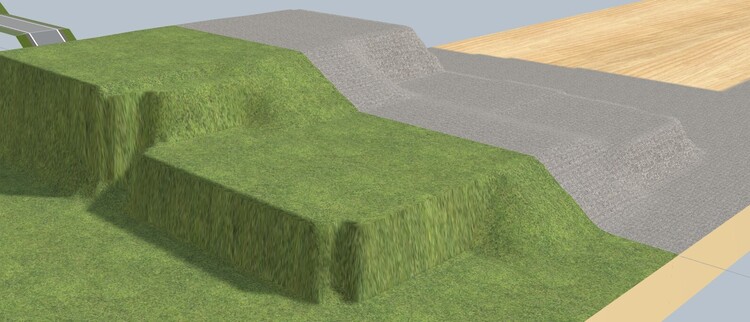
Hallo @Phrontistes, zum Thema Versätze zwischen Modulen. Ich habe mal etwas rumprobiert, wie man die Schnittstelle lösen kann. Hier mal zwei aneinander grenzende Bodenplatte mit deutlichem Versatz im Gelände. Zur Verdeutlichung mit verschieden Texturen. Die Kontur des gewünschten Übergangs aus mehreren Spuren modellieren. Hier als einfaches Beispiel mit der einspurige Landstraße von Bahnland. Jetzt alle Spuren auswählen (aber nicht gruppieren!) und auf jeweils beiden Platten mit "Rampe und Böschung" die Kontur erzeugen. Dazu müssen die Spuren jeweils mit dem "X"-Pfeil kurz auf die jeweils anzuhebende Platte verschoben werden. Ich denke, das Ergebnis kann sich sehen lassen und geht schnell. Zur Korrektur deiner kleinen Ecken oben, würde ich ein kleineres Objekt wählen, oder die Spuren per Skalierung verkleinern. VG, Hakweye

-
Werd doch mal genauer, installierst du den neuen Laptop von Downloads aus dem Internet oder per Backup?
-
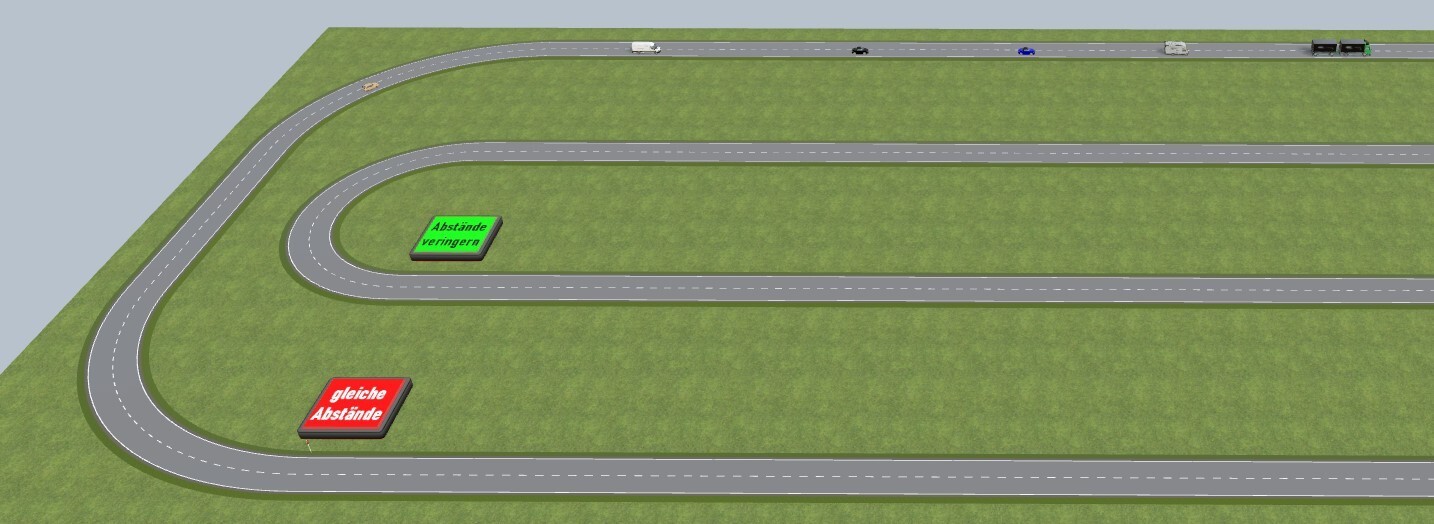
Hallo, hier mal ein Beispiel, wie man die Abstände zwischen den Fahrzeugen nach einem Stopp oder auch während der Fahrt verändern kann. Durch die Schalter können die Abstände variiert werden. Abstände zwischen Fahrzeugen.mbp Als Hinweis noch, die Anlage läuft mit doppelter Geschwindigkeit ab. (Und nur grafische EV, ohne Lua ) VG, Hawkeye

-
Sorry, habe auf die Schnelle vergessen von „Gleiskontakt“ auf „Fahrzeug“ umzustellen. Aber ich denke, das man das trotzdem versteht. Habe trotzdem oben die Bilder ersetzt.
-
Wieso nicht? Du kannst doch ein leeres Objekt vergeben. (Bild korrigiert) Das funktioniert auch. EIN Ziel wird bei mehreren Möglichkeiten immer ausgewählt. Ist nur die Frage, ob es auch das ist, welches man ansteuern möchte. VG, Hawkeye

-
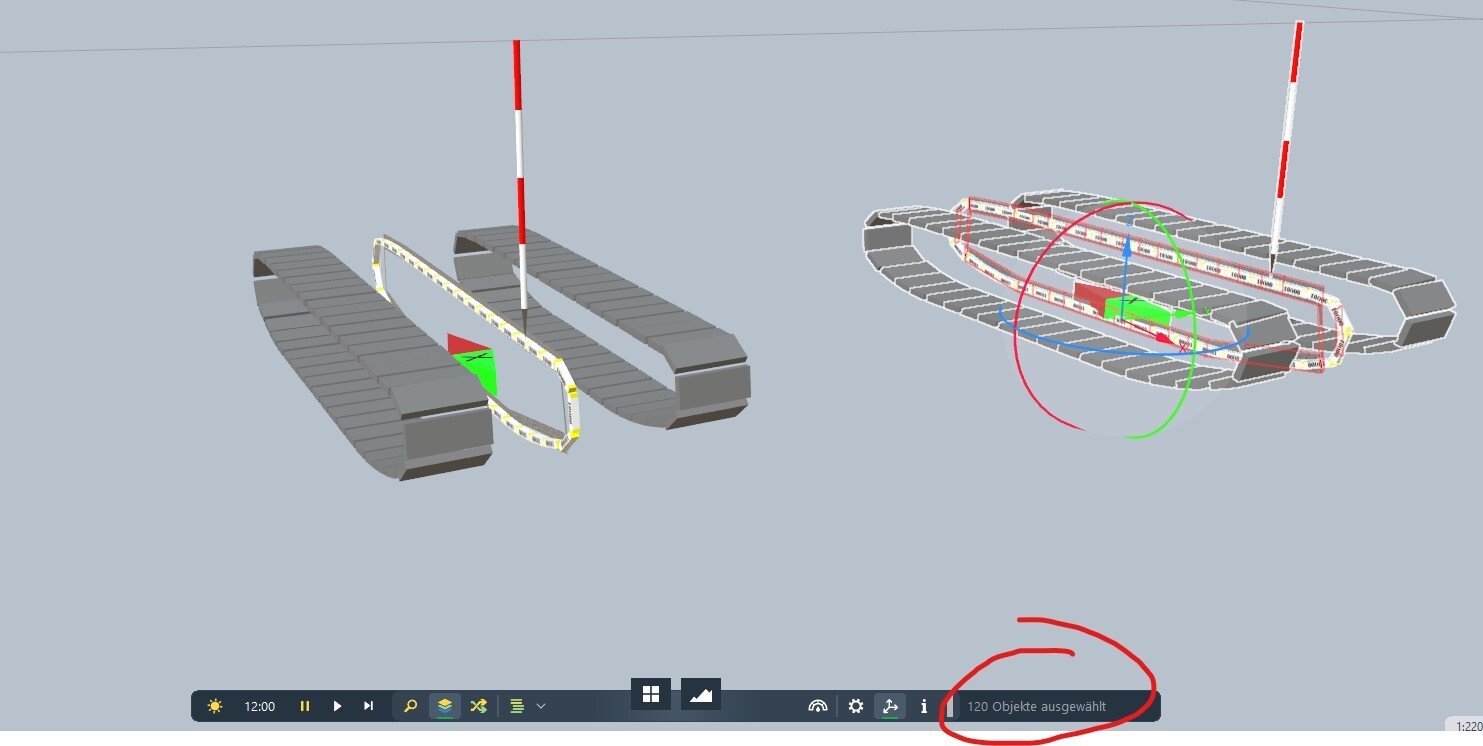
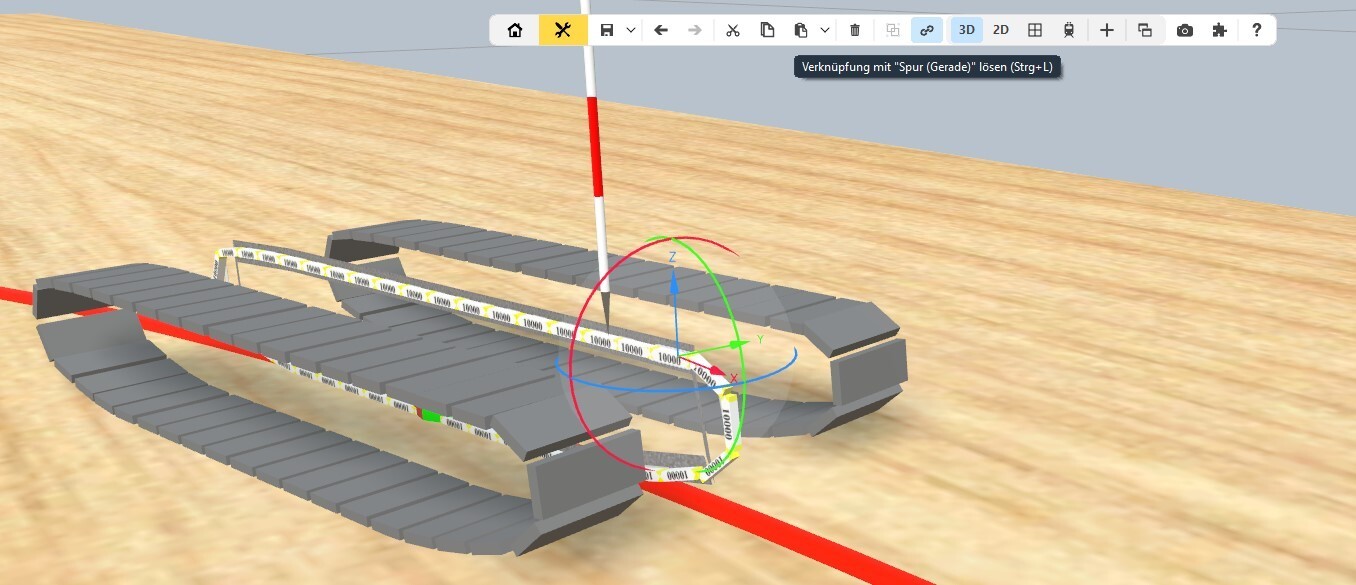
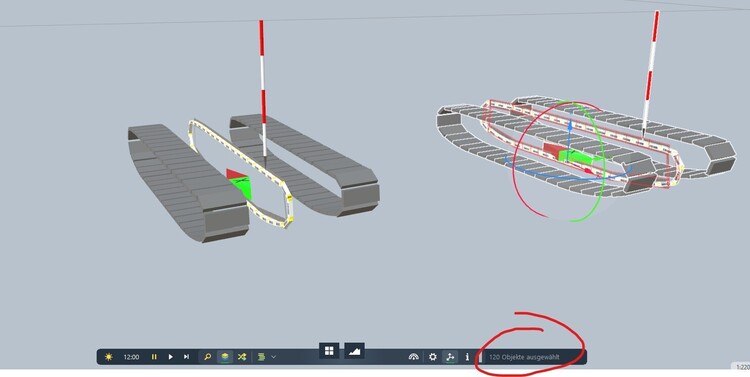
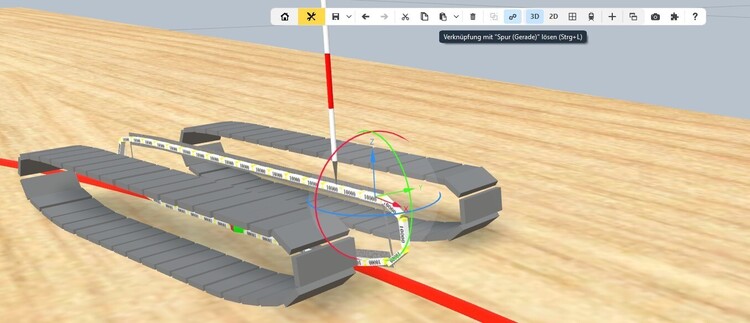
Hallo @opax, ich denke, das du hier eine Ansammlung von gruppierten (Steuerkette: 32 Objekte) und verketteten Objekten (120! zzgl.Steuerkette) hast, die du in dieser Konstellation auch gemeinsam kopieren und verschieben möchtest. Beim Kopieren sind alle Objekte wohl noch da, aber nicht mehr der Stelle, an der sie sein sollen. Ein solches Problem wurde schon häufiger auch mit wesentlich weniger Objekten bei Neo angesprochen. Bisher gibt es aber noch keine Lösung. VG, Hawkeye
-
Hallo @BahnLand, ja, das ist noch so. Das liegt u.a. an der (oben beschrieben) falschen Abfrage für den „Gegenverkehr“, die nicht wie gewünscht funktioniert hat. Der noch durchzuführenden Optimierung der Lage der Gleiskontakt und dem Einfluß der zufälligen Einstellungen der „Verzögerung“ bei den Fahrzeugen , die hinter den LKW‘s herfahren. Hier muß noch etwas optimiert werden. Der Abstand von Fahrzeugen, die hintereinander fahren, hängt von der Verzögerung des Verfolgers ab. Es reicht aber nicht, nur die Verzögerung des Verfolgers zu erhöhen, um den Abstand zu verringern. Es muß ihm auch eine höhere Geschwindigkeit als dem vorausfahrenden Fahrzeug mitgegeben werden. Nur dann fährt der Verfolger auch näher an das vorausfahrende Fahrzeug, bis der Bremsweg-Abstand mit der höheren Verzögerung hergestellt ist. Danach bremst der Verfolger wieder auf die Geschwindigkeit des vorausfahrenden Fahrzeugs ab. VG, Hawkeye
-
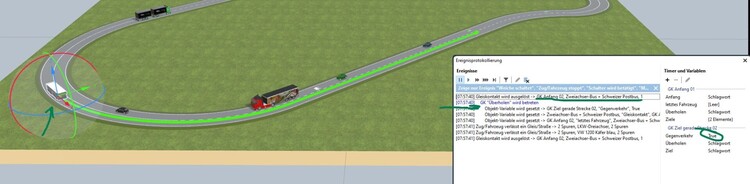
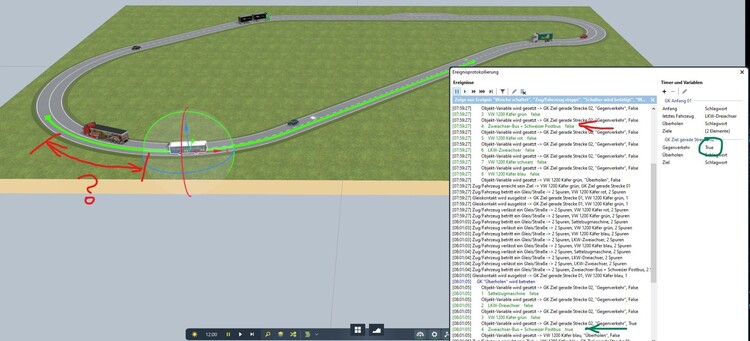
Hallo, nachdem die Tests mit der Anweisung :is HeadingToward () und einem zusätzlichen Gleiskontakt auch nicht zu einem zufriedenstellenden Ergebnis geführt haben, ist die Lösung dann doch einfacher, als ursprünglich gedacht. Direkt die Ziele aller Fahrzeuge überprüfen. Damit klappt es dann auch, das die Variable "Gegenverkehr" genau zwischen den beiden GK auf "true" gesetzt wird. Wie sagt Götz immer so schön. Manchmal denkt man "von hinten durch die Brust ins Auge". (oder war das Brummi? ) VG, Hawkeye
-
Danke, soll auch nur ein Richtwert sein, weniger sollte dann wohl immer gehen. VG, Hawkeye
-
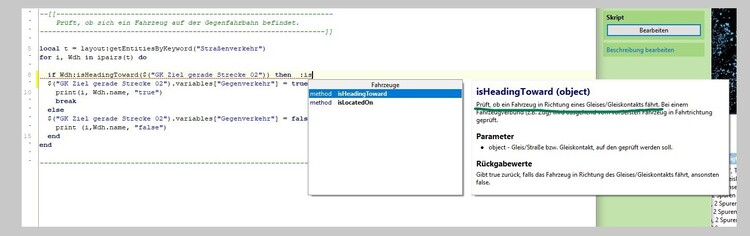
Hallo @Neo, gibt es für die function :is HeadingToward () einen Anhaltswert für die Entfernung zum Gleiskontakt in [m] nach dem man sich richten kann? Oder ist die Entfernung auch von der Fahrzeuggeschwindigkeit und der Verzögerung des Fahrzeugs abhängig? Dann bräuchte ich wohl nur einen zweiten Kontakt für die Prüfung, um die ganze Strecke mit „true“ erfassen zu können. VG, Hawkeye
-
Dann solltest zu konsequenterweise auch dieses Skript übersetzten. VG, Hawkeye
-
Danke, aber das weiß ich auch. Ich habe es ja von der graphischen EV absichtlich in Lua übersetzt, um beim Testen so auch ohne viel Kopieren das Skript an andere Stellen in der EV hin und her schieben können. VG, Hawkeye
-
Hallo Neo, durch dieses Experimentieren lernt man aber die EV besser zu verstehen. Geht mir zumindest so. Ich sammle mit jeder neuen Herausforderung ein kleines bisschen mehr wertvolle Erfahrung, was umsetzbar ist und was nicht. Manchmal genügt schon ein anderer Ansatz zur Lösung. VG, Hawkeye
-
Danke @BahnLand, ein paar kleine Probleme sind trotzdem noch zu lösen.
-
Trotzdem sollte man solche Dinge nicht einfach ignorieren, sondern der Sache auch auf den Grund gehen und das Problem lösen!
-
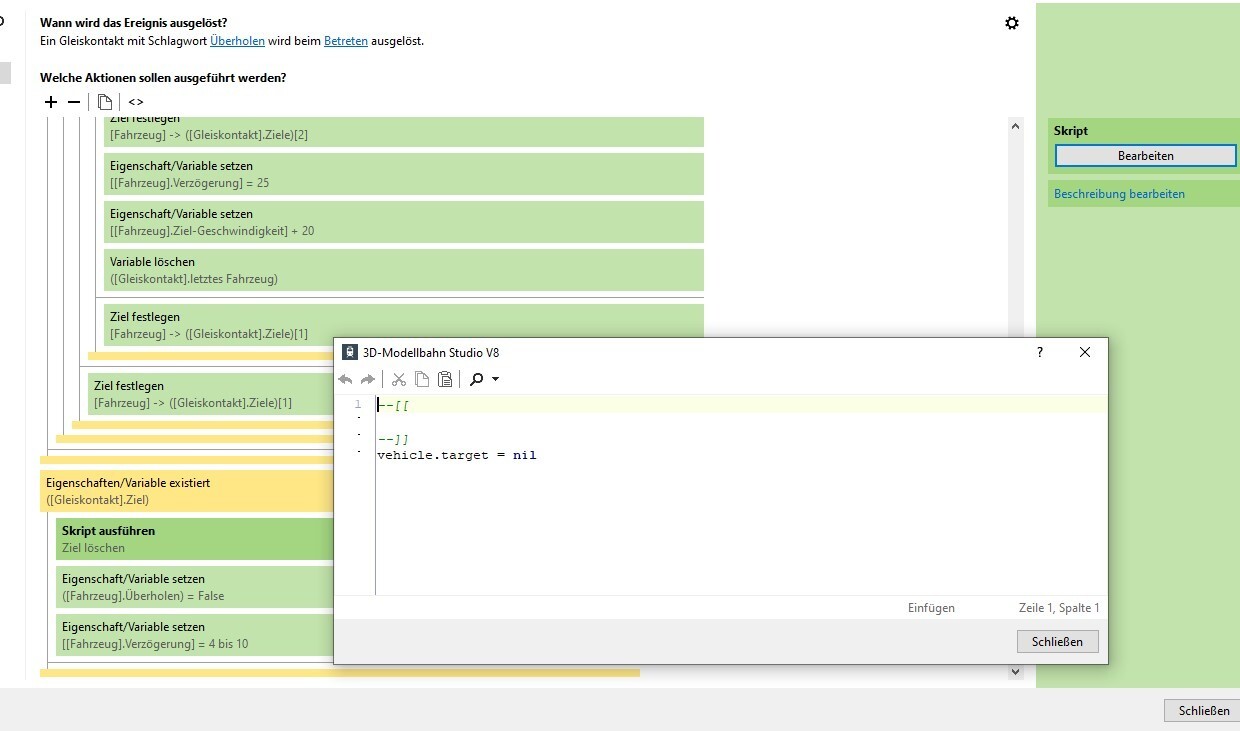
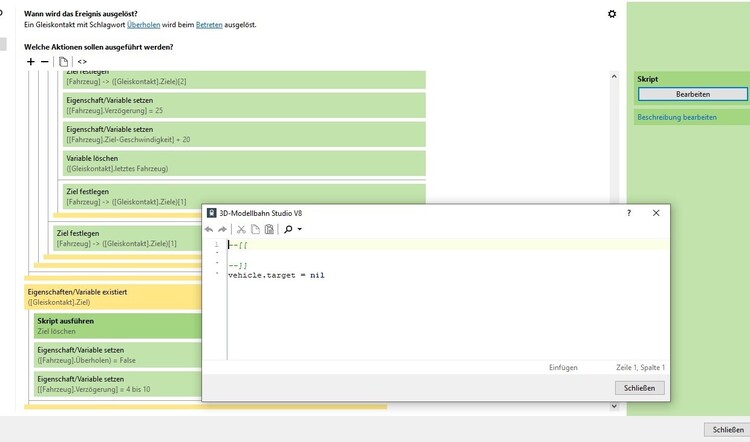
Hallo @Phrontistes, wie Neo gerade schon erwähnt hat, geht das nur mit einer Lua-Anweisung. Deshalb kann ein Ziel eines Fahrzeuges bisher auch nur mit einer Lua-Anweisung gelöscht werden, oder es wird durch ein neues Ziel überschrieben. VG, Hawkeye
-
Danke Götz, das mag sein. Aber trotzdem fährt der Bus auf diesen Gleiskontakt zu, unabhängig davon, ob es sein definiertes Ziel ist. Das steht nicht in der Beschreibung! Wie soll man darauf kommen? VG, Hawkeye
-
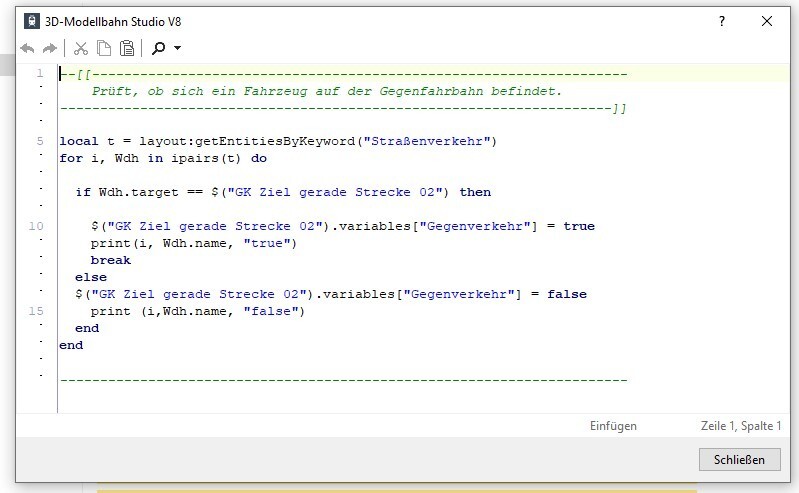
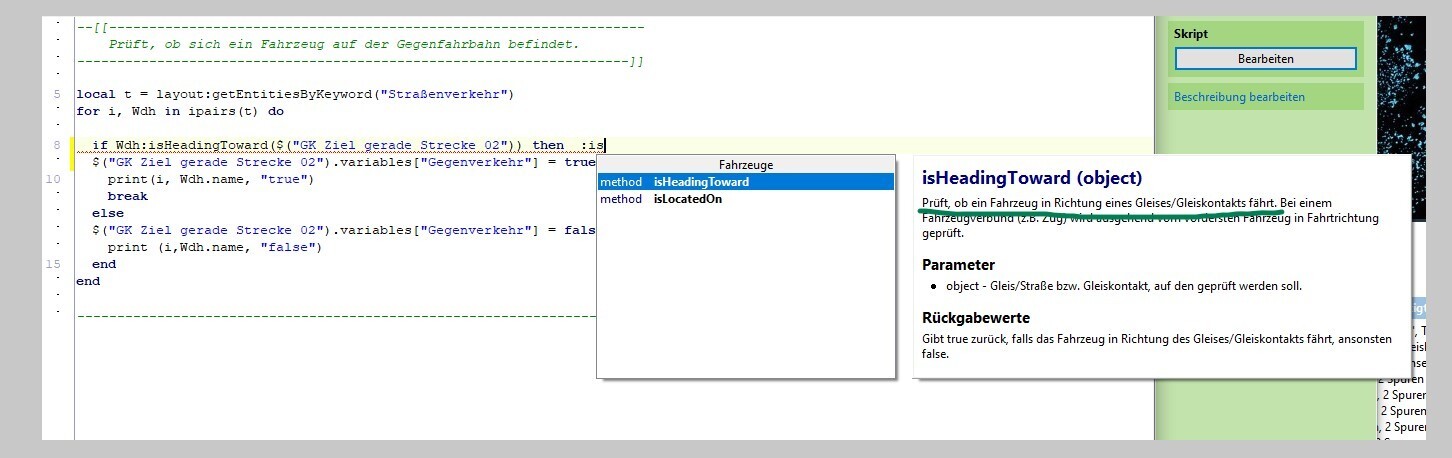
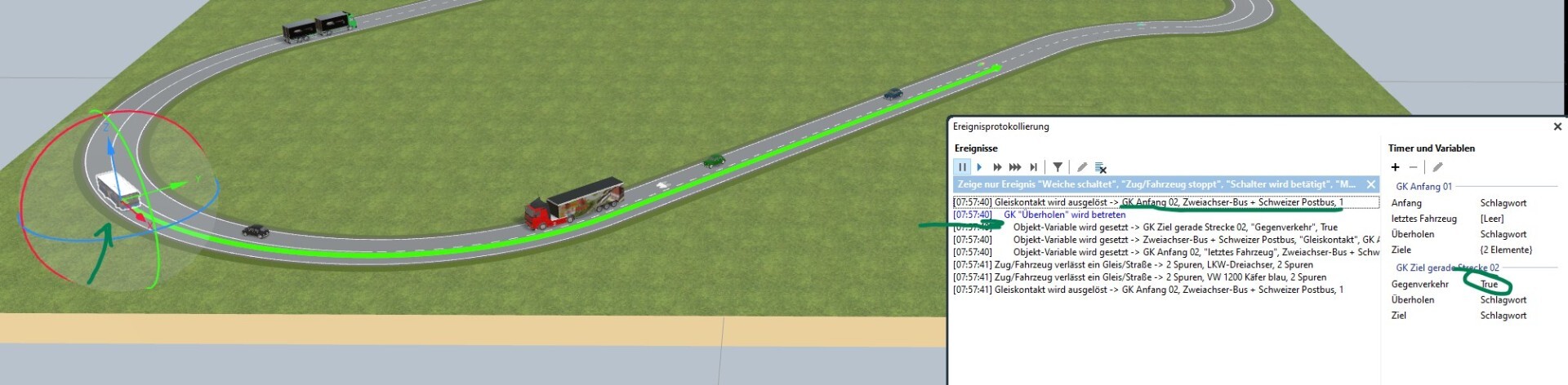
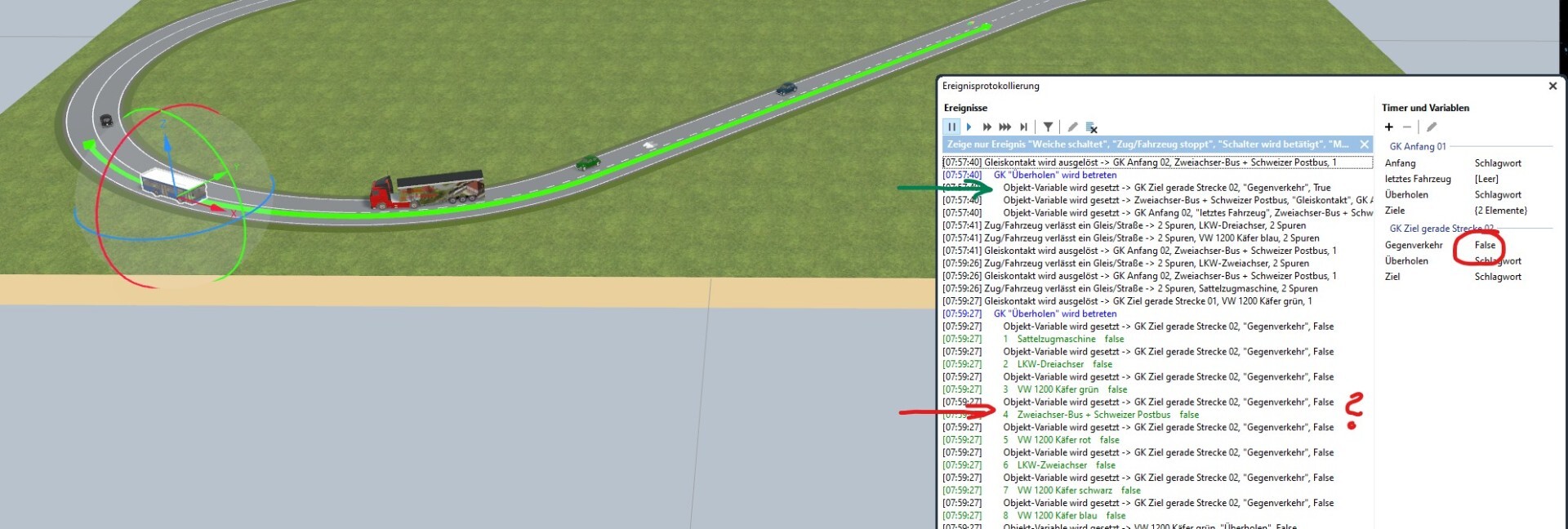
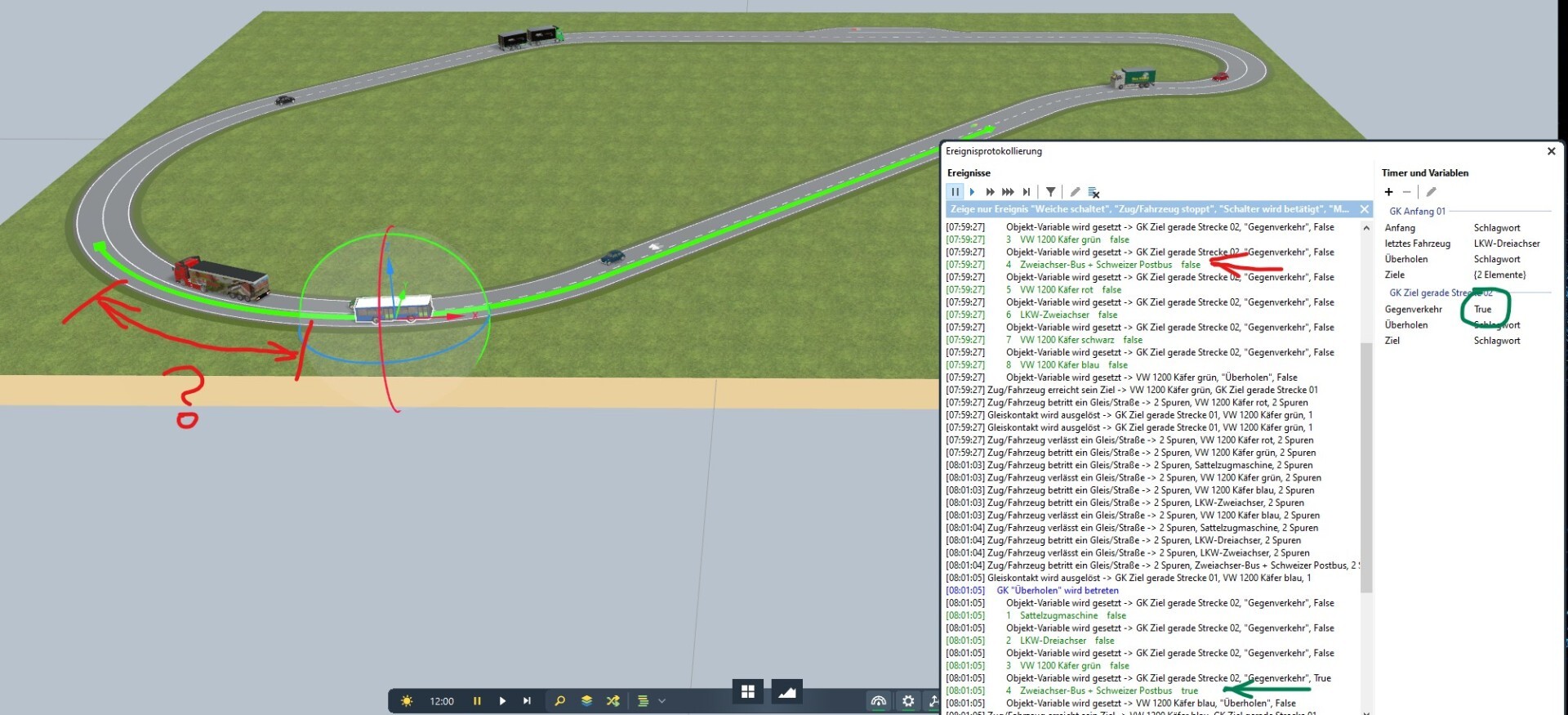
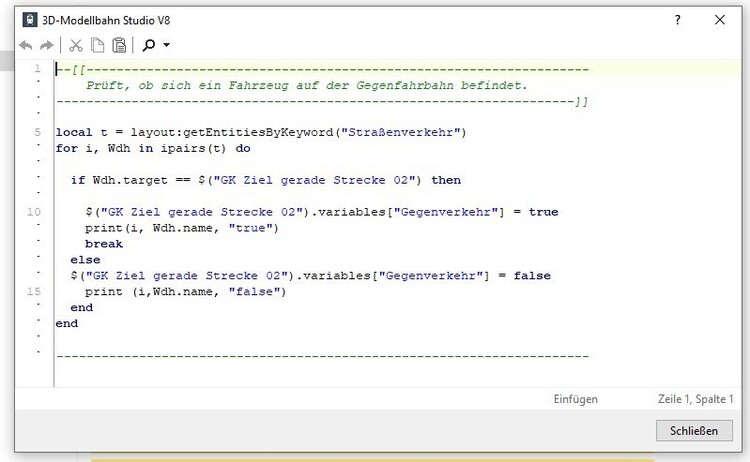
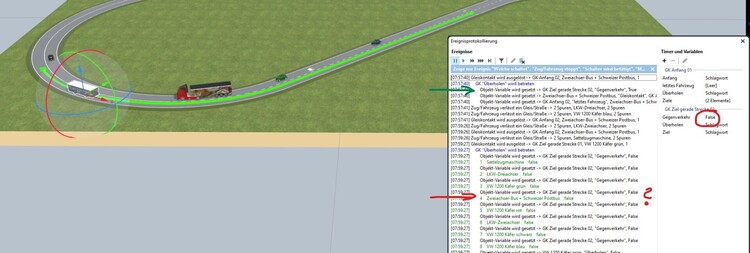
Hallo @Neo, ich habe mal wieder ein Verständnisproblem und bin auf Fehlersuche. In der obigen Anlage wird dem Bus bei Betreten des Gleiskontakte "Anfang" das Ziel zugewiesen und im Zielkontakt eine Variable "Gegenverkehr auf "true" gesetzt. Diese Variable wird ständig beim Betreten eines Gleiskontaktes durch ein beliebiges Fahrzeug durch eine Schleife geprüft, ob ein Fahrzeug (hier der Bus) auf diesen Zielkontakt zufährt. Dies wird für den Bus aber nicht sofort erkannt und die Variable "Gegenverkehr" wieder auf "false" zurückgesetzt. Erst bei der zweiten Abfrage wird das Ziel des Busses erkannt und die Variable "Gegenverkehr" wieder auf "true" gesetzt. --[[------------------------------------------------------------------- Prüft, ob sich ein Fahrzeug auf der Gegenfahrbahn befindet. ---------------------------------------------------------------------]] $("GK Ziel gerade Strecke 02").variables["Gegenverkehr"] = false local t = layout:getEntitiesByKeyword("Straßenverkehr") for i, Wdh in ipairs(t) do if Wdh:isHeadingToward($("GK Ziel gerade Strecke 02")) then $("GK Ziel gerade Strecke 02").variables["Gegenverkehr"] = true break end end Das verstehe ich nicht. Gibt es da eine Zeitverzögerung beim Erkennen des Zieles? VG, Hawkeye
-
Hallo @Neo, Hat dieser Fehler auch zu diesem schon in V7 gemeldeten Verhalten geführt? Wäre schön, wenn dadurch bei diesem Problem auch eine Verbesserung eintreten würde. VG, Hawkeye
-
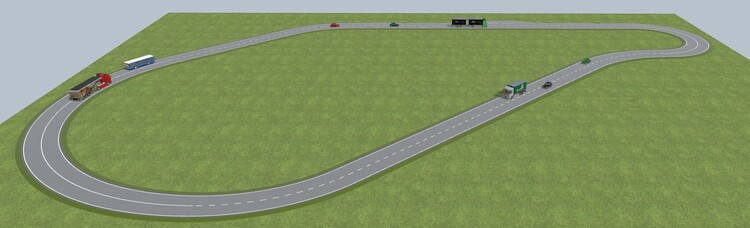
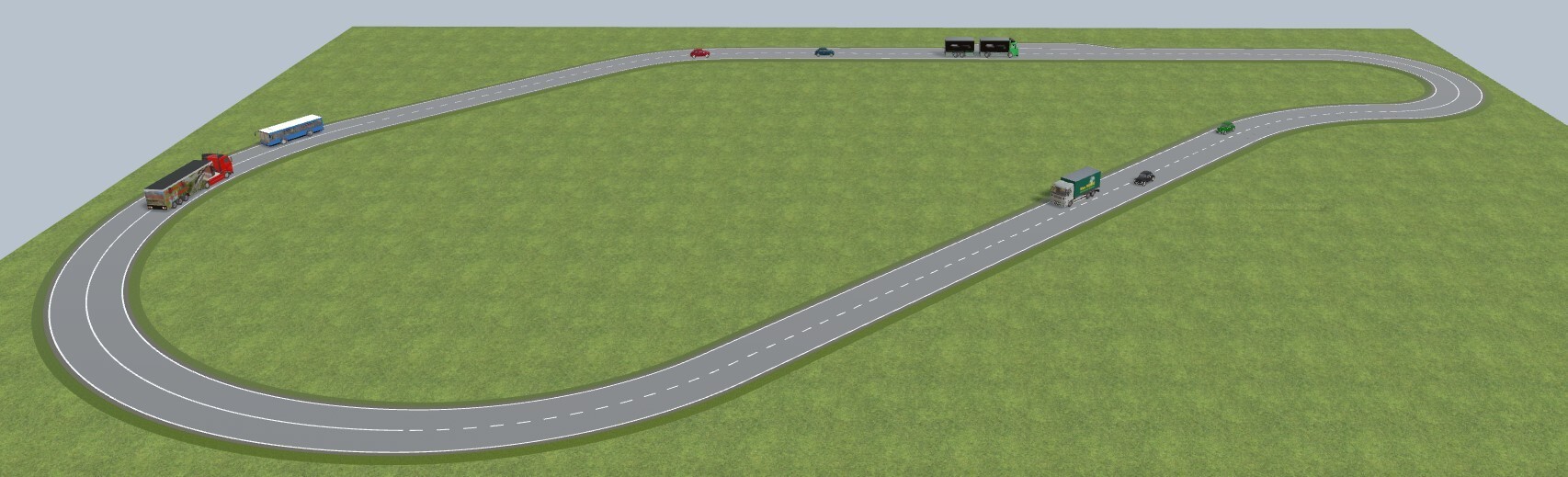
Hallo, hier zum Thema passend und um den Straßenverkehr etwas aufzupeppen, eine Studie zum "Überholen auf Landstraßen". Nur PKW überholen. Natürlich passen die PKW auch auf möglichen Gegenverkehr (Bus) auf. (Das sollen sie zumindest. ) Überholen auf Landstraße.mbp Viel Spaß. VG, Hawkeye