Hawkeye
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Hawkeye
-
Genau das ist wohl nicht der Fall. Wenn innerhalb der Ausführung einer Animation eine Anlage gespeichert wird, wird denn dann die Animation nach dem Neuladen fortgesetzt, oder direkt an das Ende der Animation gesetzt? Sowas habe ich noch nicht ausprobiert oder beobachtet, da die Animationszeiten meist sehr kurz sind. Genau Henry, das Signal wird bei „Betreten in Fahrzeugmitte“ auf Hp0“ zurückgestellt, aber die Fahrstraße ist dann immer noch „besetzt“ bis der Zug den GK vollständig verlassen hat. Ich sehe da in der Ausführung kein Problem. VG, Hawkeye
-
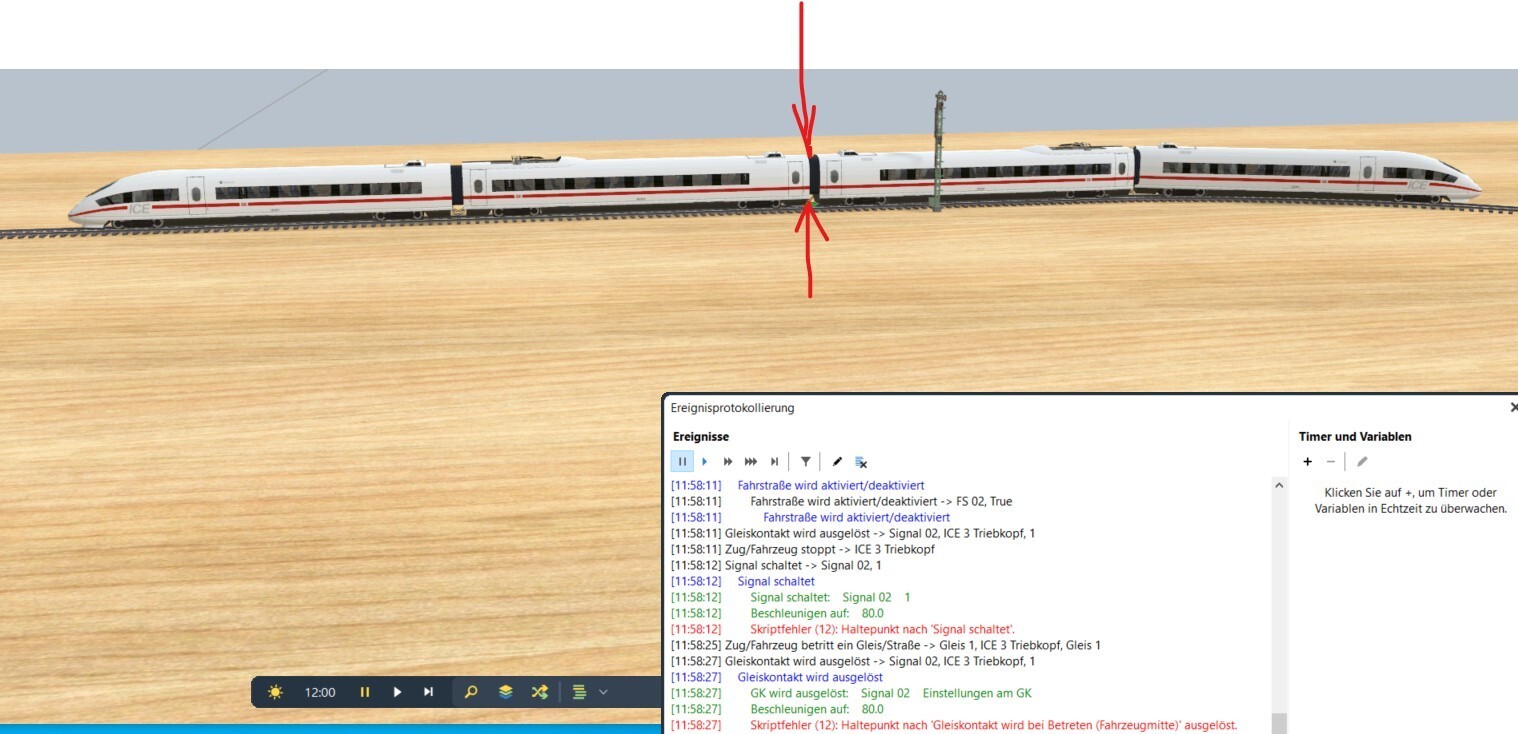
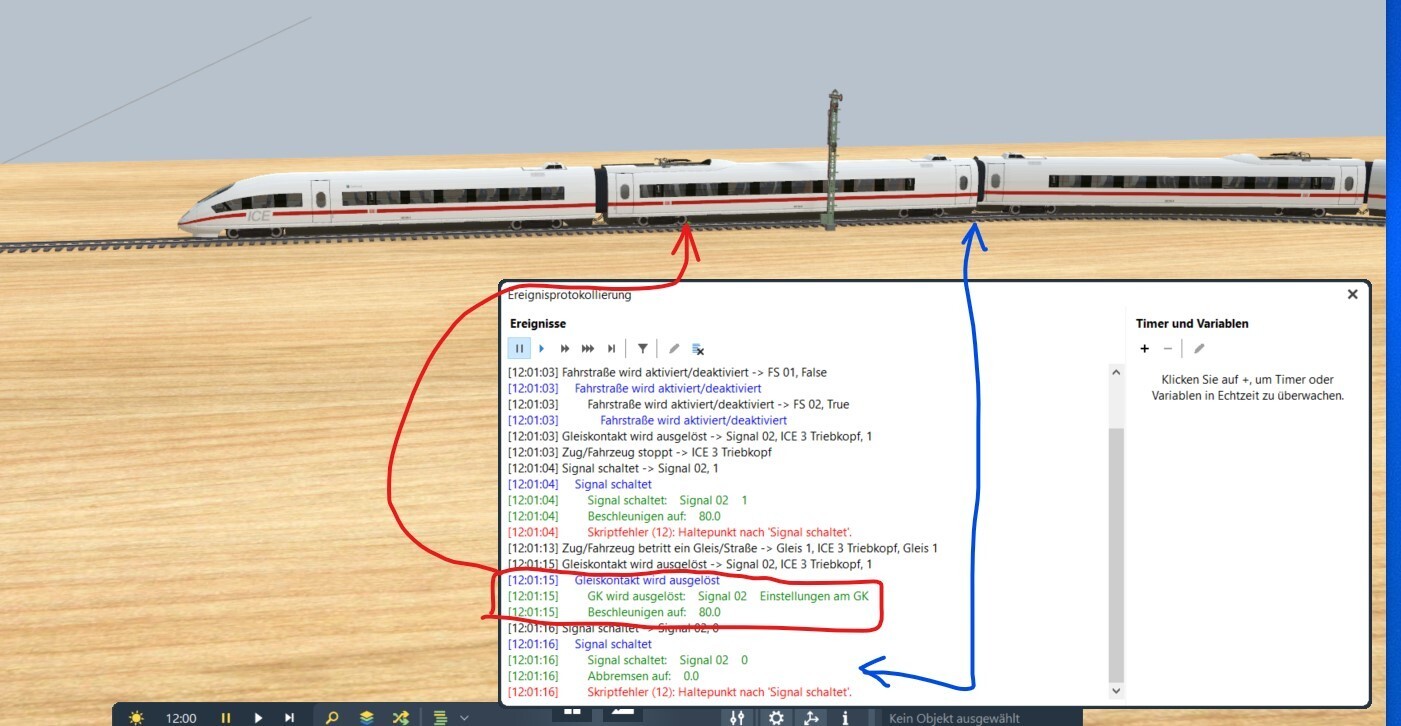
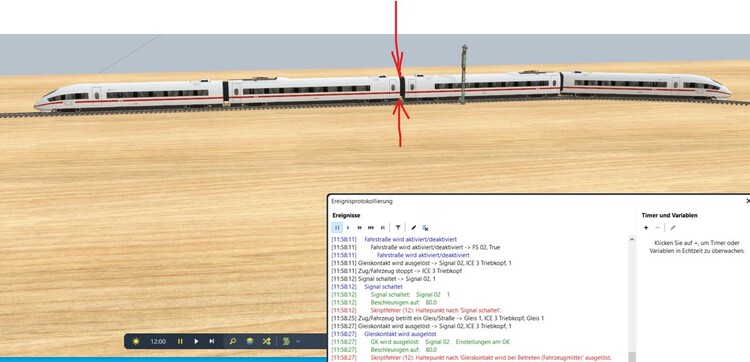
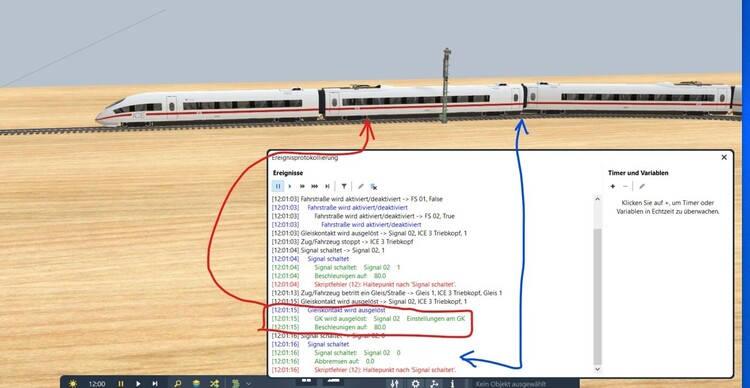
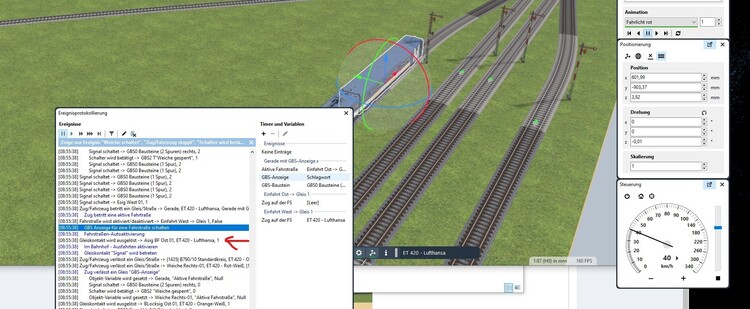
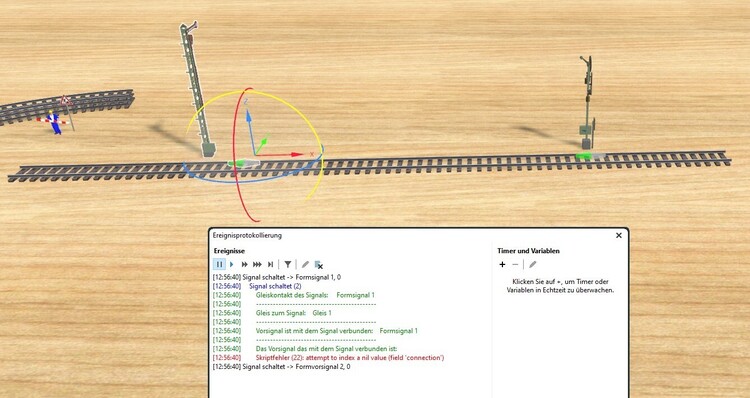
Hallo @Neo, ich glaube ich habe den "Fehler" gefunden. Soweit man es als Fehler bezeichnen kann. Es liegt an der Zeit, die für die Animation der Formsignale zum Umschalten benötigt wird. Fahrstraßen schalten Signale auf "Hp0", wenn der Gleiskontakt des Signals in "Fahrzeugmitte" betreten wird. In diesem Moment, werden aber noch NICHT die Einstellungen am GK verändert! Sondern erst, wenn die Animation des Signals vollständig abgelaufen ist! In diesem Animationszeitraum fährt der Zug weiter. Hier dazu einen kleine Testanlage. Test Signalumschaltung.mbp Ich habe wohl bei Speichern meiner Anlage genau einen solchen Zeitpunkt innerhalb der Animationszeit erwischt, so das die Werte der vorherigen Signalstellung erhalten blieben. VG, Hawkeye
-
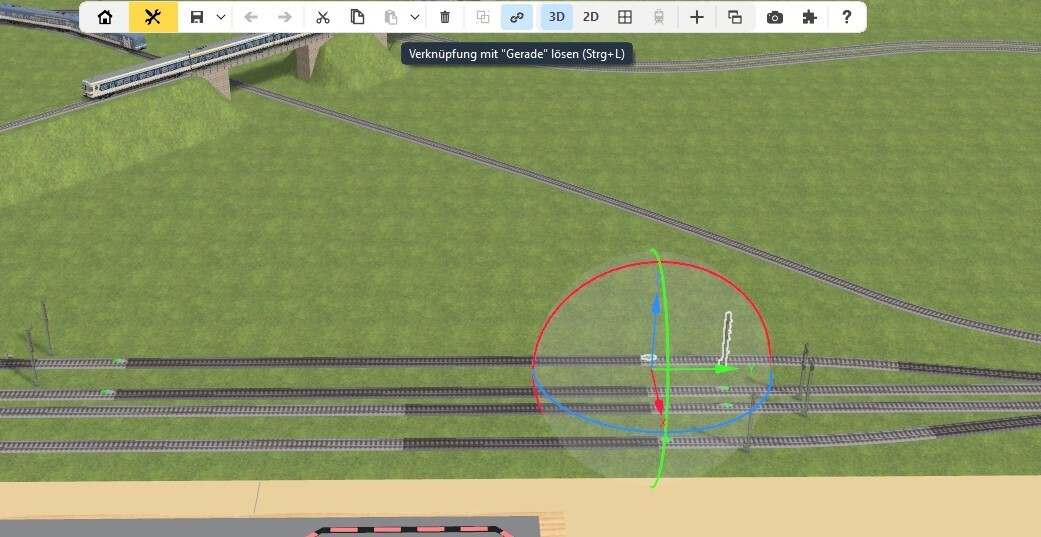
Hallo Wüstenfuchs, erstmal ein Dank an Alle für eure Versuche. 👍 Ich denke nicht, das es an der Verknüpfung liegt. Der Gleiskontakt wird vom Zug ja erkannt. Er erhält beim Erreichen des GK aber eine andere Information, die nicht der aktuellen Signalstellung „Hp0“ entspricht. Ausgeführt wird die Signalstellung „Hp2“. Das haben @EASY und @Paul5102 mit ihren Versuchen ja auch bestätigt. Nach dem Laden der Anlage sind in diesem Signal-GK die Werte für die Signalstellung „Hp2“ hinterlegt, obwohl die Signalstellung „Hp0“ anzeigt. Erst durch manuelles Eingreifen wird diese Information korrigiert. Zum Beispiel durch Hin- und Herschalten auf Hp1 und gleich zurück auf Hp0. Interessant wären hierbei noch die Fragen: Warum nur bei diesem einen Signal? Bei allen anderen Signalen auf der Anlage läuft es korrekt. Hat jemand auf anderen älteren Anlagen ein vergleichbares Verhalten schon mal festgestellt? VG, Hawkeye
-
Hallo @SualokinK, sieht gut aus. 👍 🤔 Kommt mir beladen aber doch sehr hoch vor. Durchfahrtshöhen für Brücken beachten! 😂 VG, Hawkeye
-
Na gut, das Beispiel ist nicht groß. Hier also nochmal in V7. V7-Ein Objekt skalieren.mbp VG, Hawkeye
-
Kannst du nicht wenigstens die "Standard"-Version von V8.5 installieren ? Die bietet Neo doch kostenfrei an.
-
Hallo @Leihe, eine kleine Hilfestellung kann man dir aber wohl geben. Wenn der Zeitfaktor außen vor bleibt und die Veränderung der Skalierung über einen Schalter realisiert ist. Da dürfte auch @Goetz nichts gegen haben. Objekt verkleinern.mbp VG, Hawkeye


-
Hallo @Leihe, Es würde schon funktionieren, … aber wenn man ein ruckelfreies Ergebnis erhalten möchte, dann bekomme ich wieder Ärger mit @Goetz. 😂 Zitat von Götz bei einem anderen Fall: „Weil Lua für solche Spielereien nicht gedacht ist.“ (Zumindest sinngemäß) VG, Hawkeye
-
🤔 Mit einem ruhenden Objekt, das sich nicht bewegt, könnte das funktionieren. Dann gib mal ein paar Parameter an. Skalierungswerte für „Anfang“ und „Ende“ Und den Zeitrahmen in dem der „optische Effekt“ ablaufen soll. Der Effekt soll doch bestimmt in einer definierten Zeit ablaufen. VG, Hawkeye
-
Kannst du die Frage präzisieren? Was soll in der EV „eingestellt“ werden? Was möchtest du in der EV „ändern“? Skalieren geht in Lua. VG, Hawkeye

-
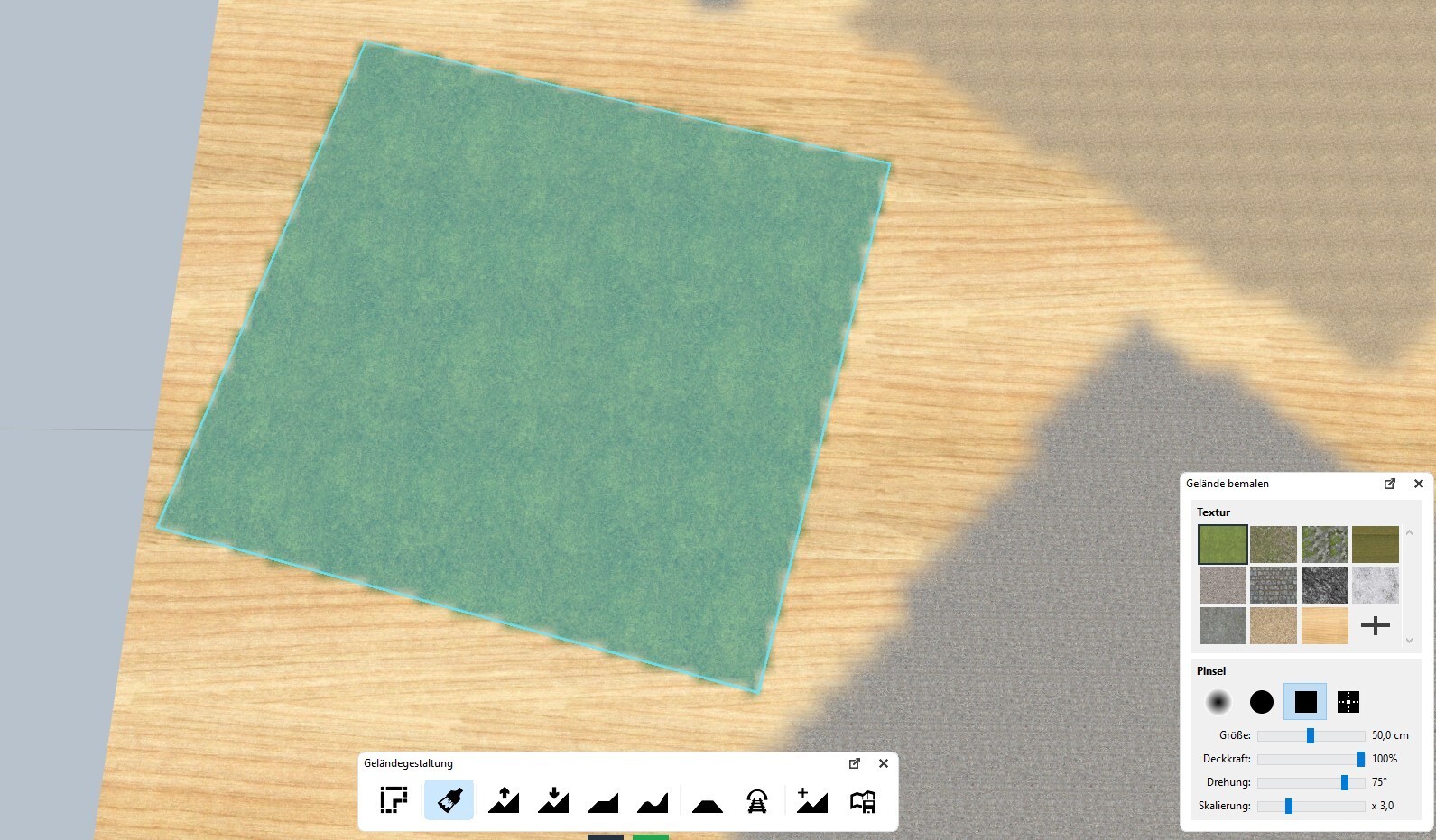
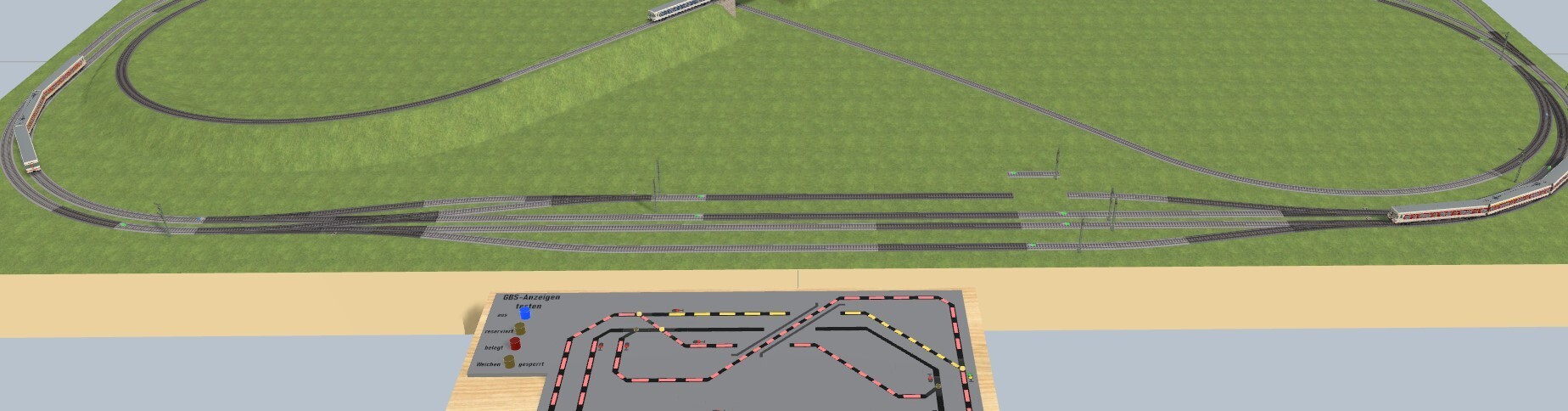
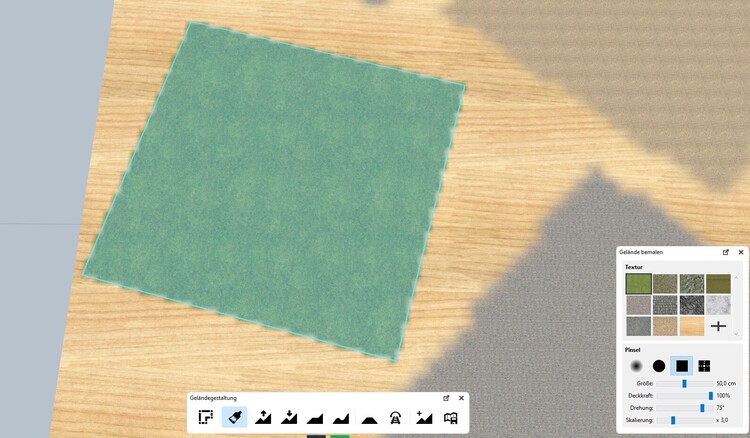
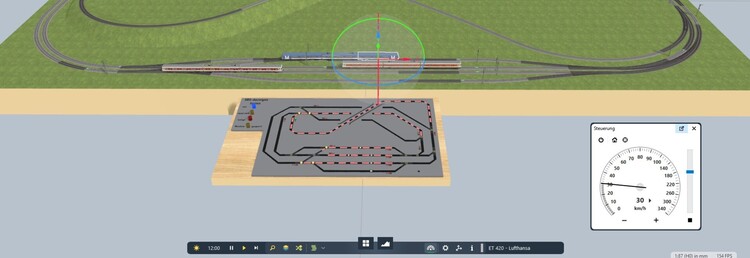
Hallo @LokoKlaus, hier mal zum Vergleich noch ein Bild aus V7. Es hat sich am Raster seit V7 über V8 zur 8.5 nichts verändert. Lediglich der quadratische Pinsel kann jetzt gedreht werden. Trotzdem werden die Texturen an der Kontur des Rasters erzeugt und und nicht an den Linien des Pinsels. Da ist durch die neue Möglichkeit des "Drehens" des quadratischen Pinsels wohl eine andere Erwartungshaltung entstanden. Das Raster wird mit dieser Einstellung nicht verdreht. VG, Hawkeye


-
Hallo @LokoKlaus, zeige doch mal ein Bild von deinen „Pinsel“ Einstellungen. VG, Hawkeye
-
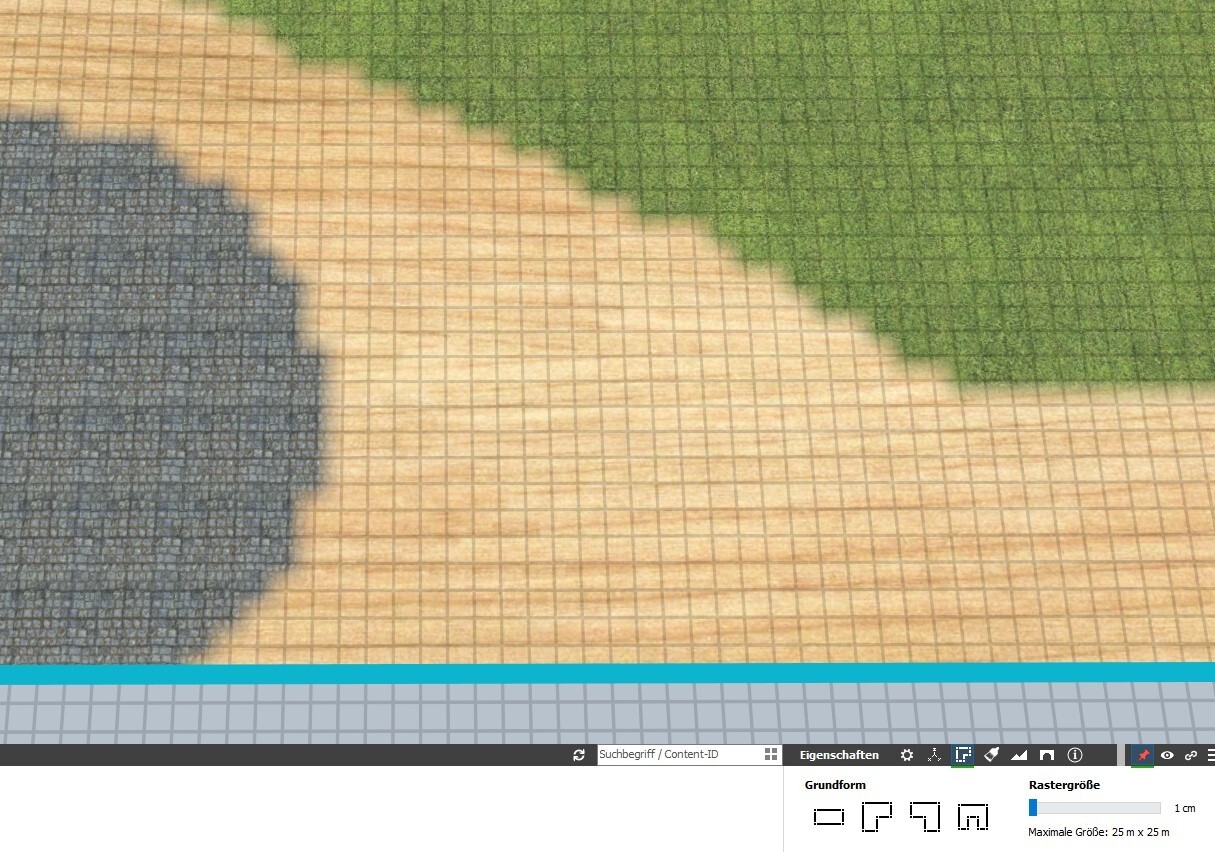
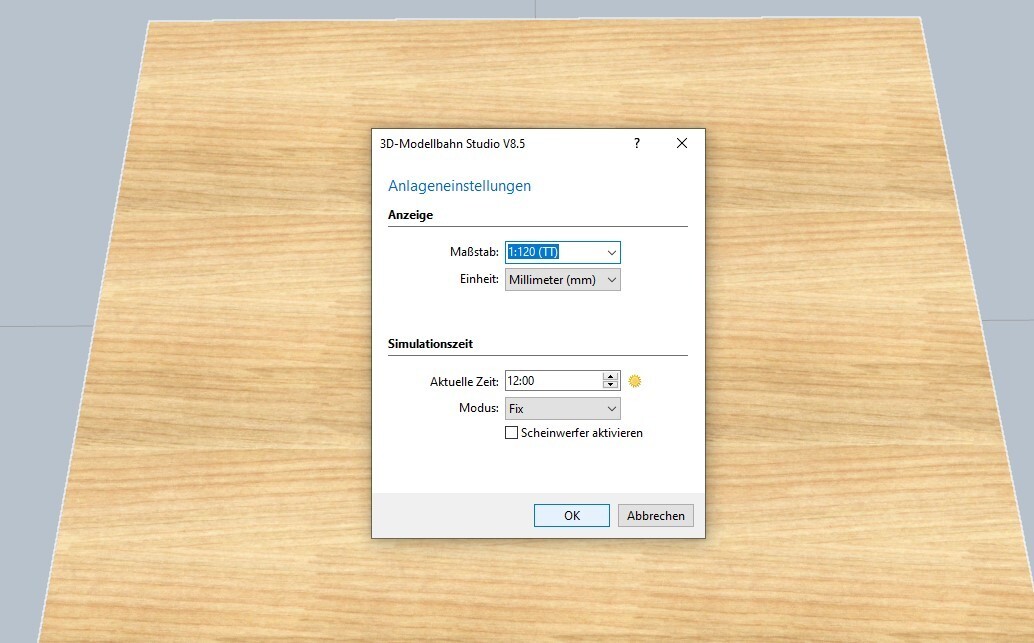
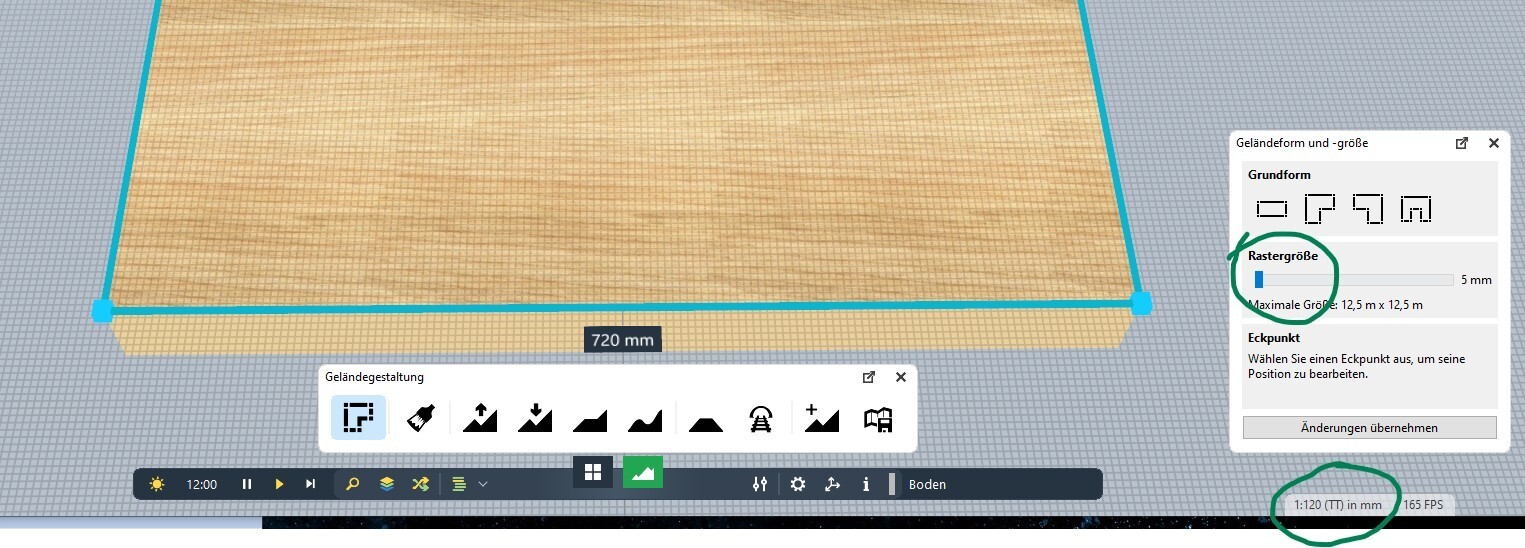
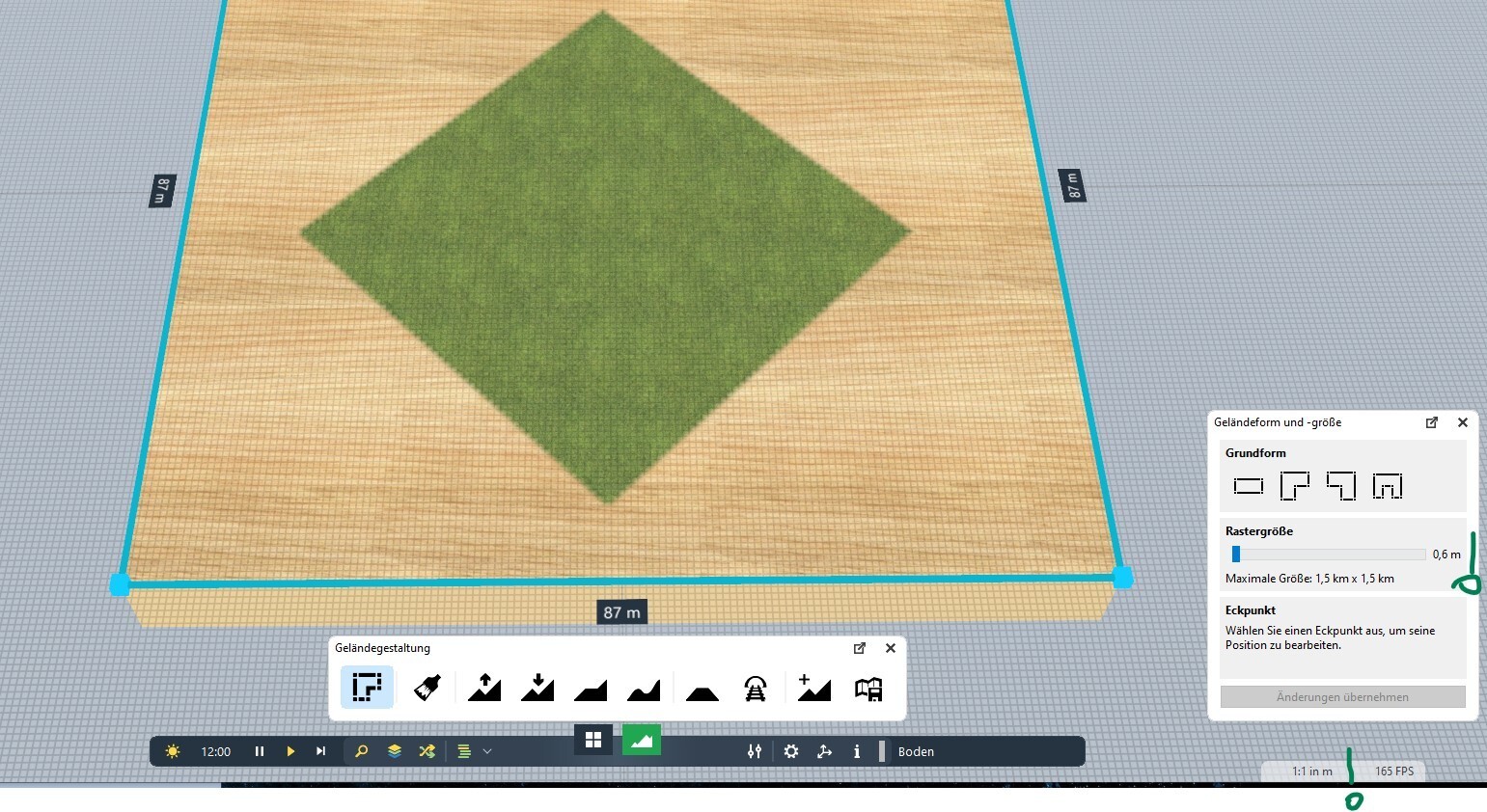
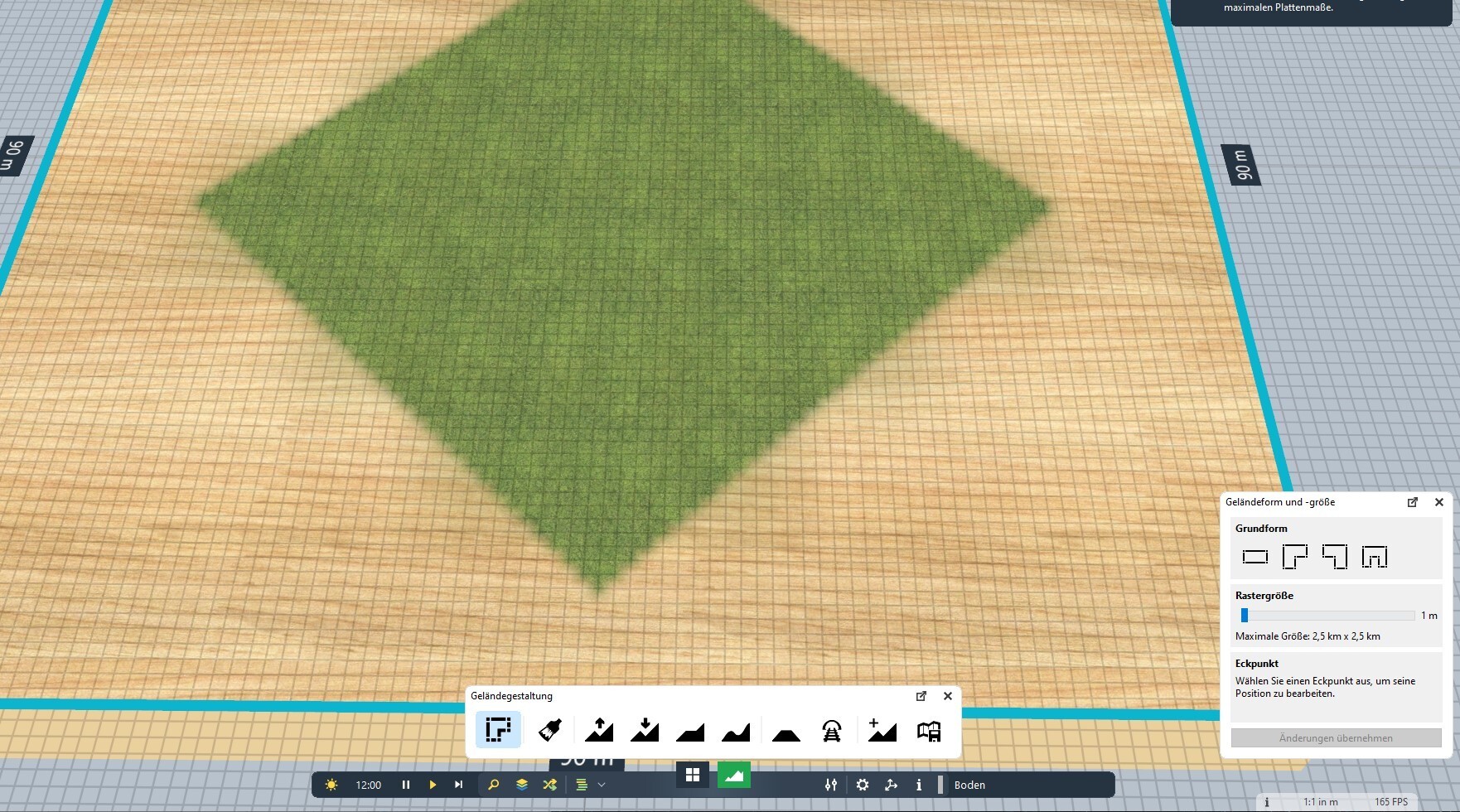
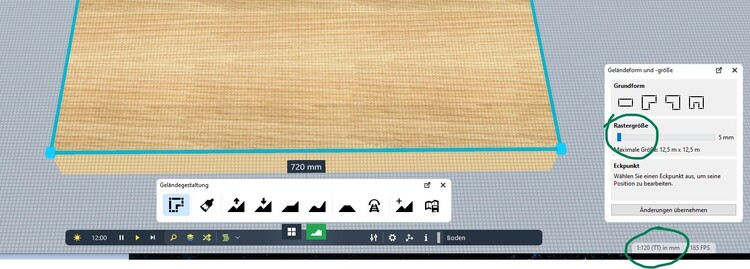
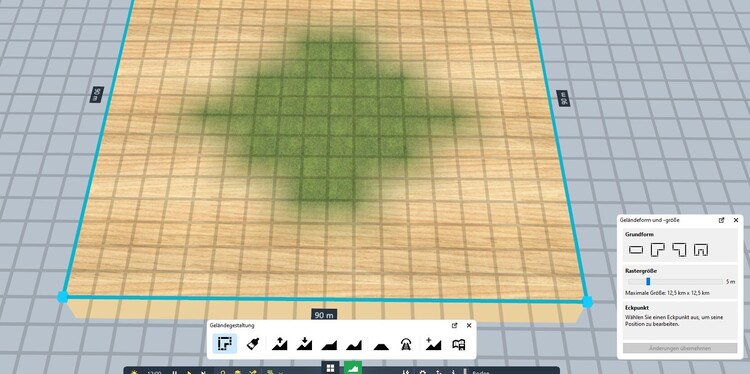
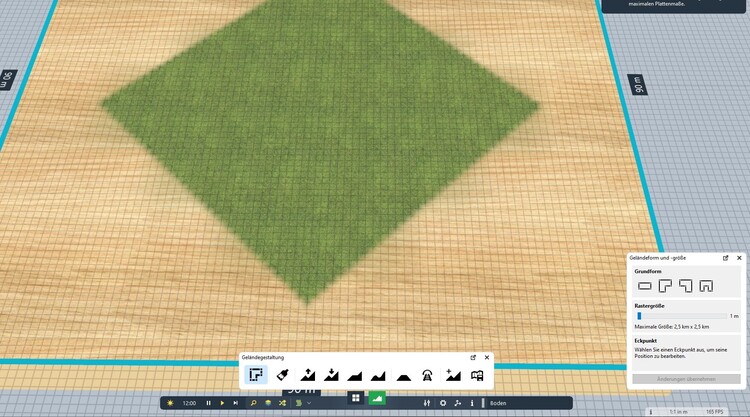
Hallo @LokoKlaus, ich nehme an, das du das "Ausfranzen" auf ein gedrehtes Quadrat beziehst. Hier mal eine Darstellung im Maßstab 1:1 mit einer größeren Rastergröße von 5m. Im Vergleich mit der im Maßstab 1:1 geringstmöglichen Rastereinstellung von 1m (Programvoreinstellung). Es gibt aber einen kleinen Trick, um die Rastergröße noch etwas zu verfeinern. Hier ein Beispiel: Stelle den Maßstab auf 1:120 (TT) um. Dann in diesem Maßstab 1:120 (TT) die Rastergröße auf die geringste Einstellung von 5mm. Und gehe danach wieder auf den alten Maßstab 1:1 zurück. Die Rastergröße bleibt vom vorherigen Maßstab erhalten, wenn du sie jetzt manuell nicht wieder veränderst. (Sonst wird die Rastergröße wieder auf 1m zurückgestellt!) Dadurch bekommst du im Maßstab 1:1 das feinst mögliche Raster mit 0,6mm. Der Nachteil ist aber wohl gerade bei größeren Anlagen ein Performanceverlust. Manchmal loht es sich aber, den Maßstab für solche Feinheiten umzustellen. VG, Hawkeye


-
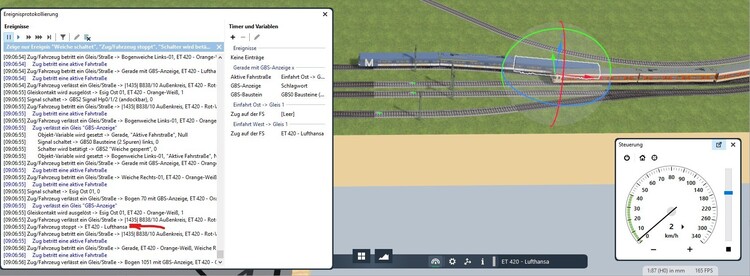
Danke für den Hinweis. -> Neuer Versuch ... . Leider nein. Hast du die Anlage gestartet, bevor du das Gleisstück wieder eingesetzt hast? Bei mir fährt der Zug auch dann weiter. Hier noch ein Versuch: Wenn man die Lok kurz bevor sie das Signal erreicht vom Gleis nimmt. (Ohne die Anlage zu stoppen!) Und dann die Lok wieder auf das Gleis gesetzt wird, hat sie erstmal keine Geschwindigkeit. Für die Reststrecke bis zum Signal habe ich ihr eine kleine Geschwindigkeit von 30 km/h gegeben. Sobald die Lok das Signal erreicht, beschleunigt der Zug wieder auf 40km/h. Oder einfach nur eine andere Geschwindigkeit als 40 km/h an der Lok einstellen, bevor das Signal erreicht wird. Bei einer höheren Geschwindigkeit bremst die Lok rechtzeitig auf 40km/h ab. Bei einer niedrigeren Geschwindigkeit beschleunigt die Lok beim Betreten des GK auf 40 km/h. Es müsste dann wohl an einer fehlerhaften Information im Signal liegen. Beim Start der Anlage sind im Signal wohl bei Stellung "Hp0" die GK Einstellungen für "Hp2" hinterlegt. VG, Hawkeye






-
Hallo @Herman, sure, there are many different ways to stop this Train in front of the Signal. And once you stopped it manually, the Layout works as wanted. But why not when starting the layout for the first time? Regards, Hawkeye
-
Interessant, bei mir nicht. Sie fährt trotzdem weiter. Wenn die Lok das Signal erreicht, ich sie wegnehme und wieder auf das Gleis setzte, dann bekommt sie wieder automatisch eine Geschwindigkeit von 40 Km/h, obwohl am Signal „Abbremsen auf „0“ eingestellt ist. VG, Hawkeye
-
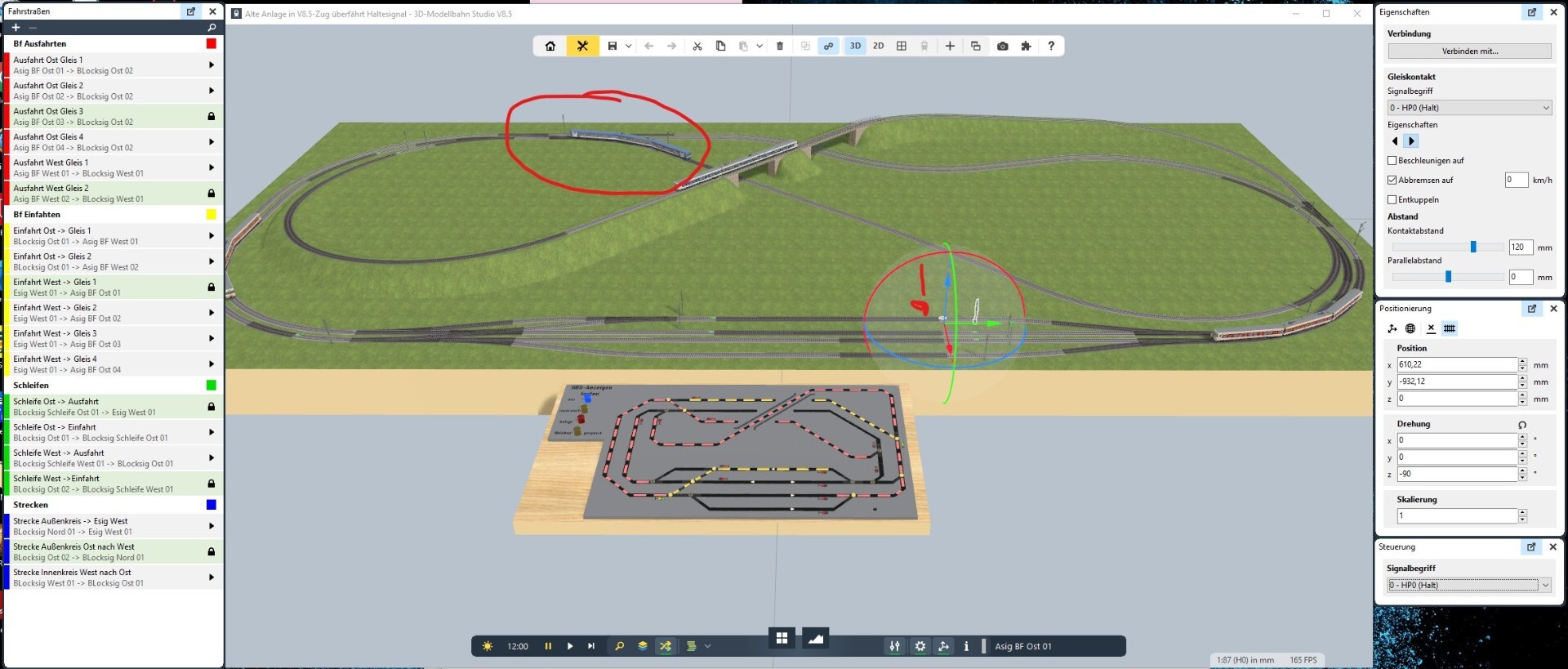
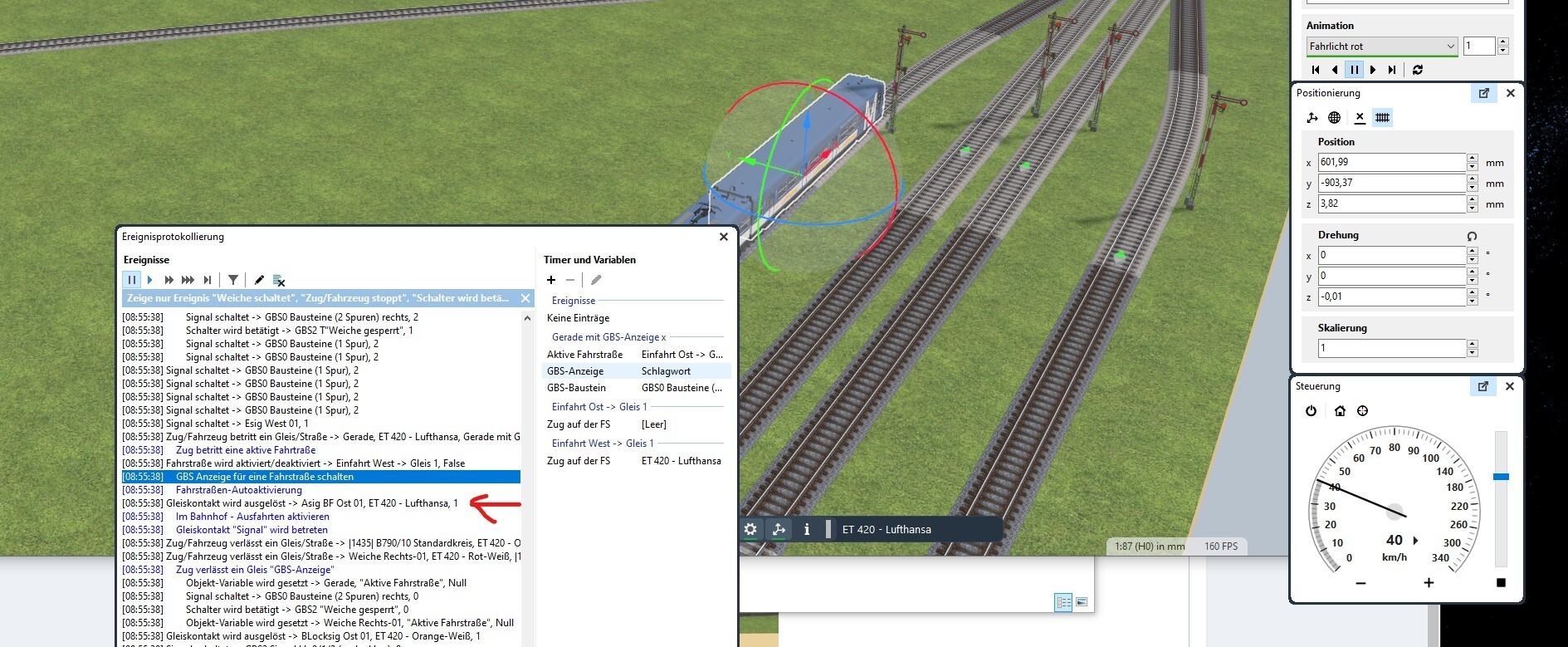
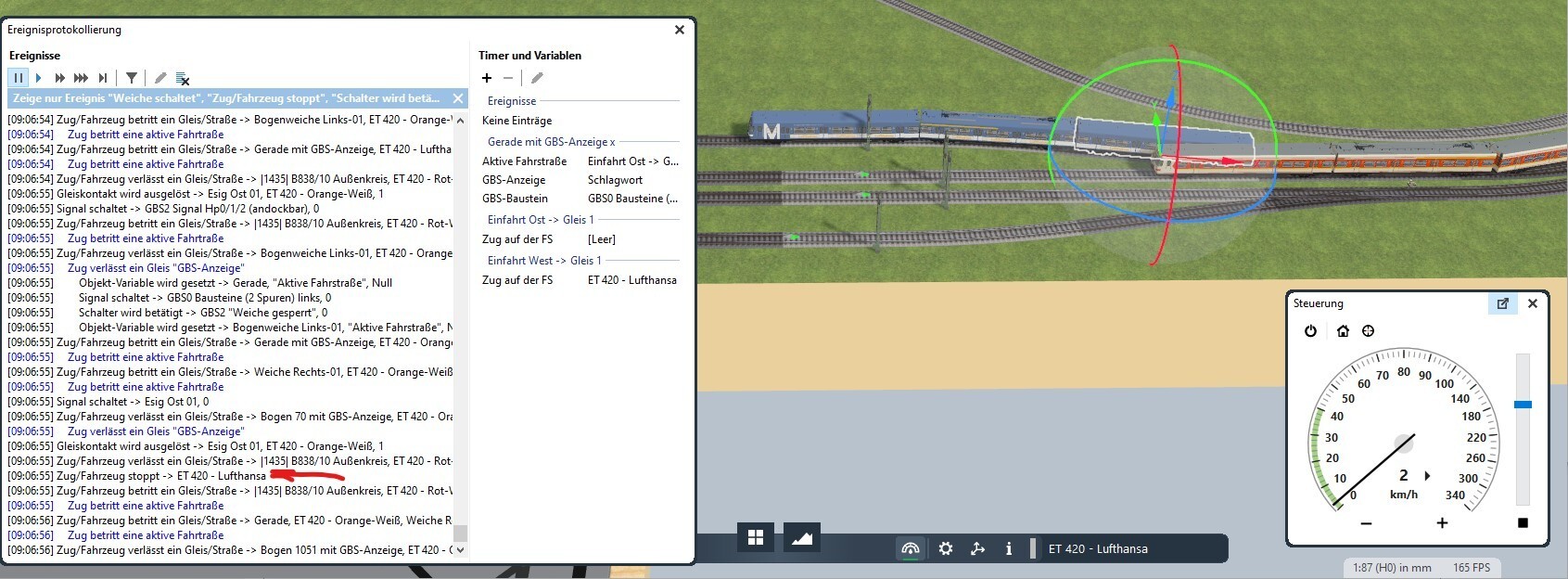
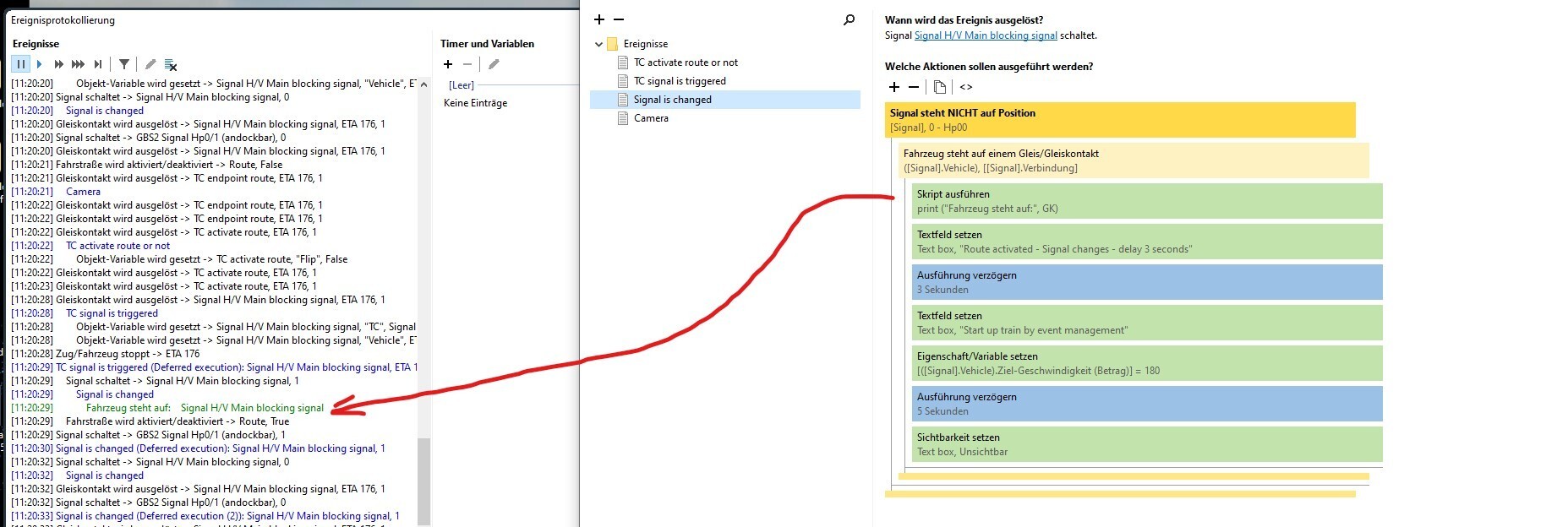
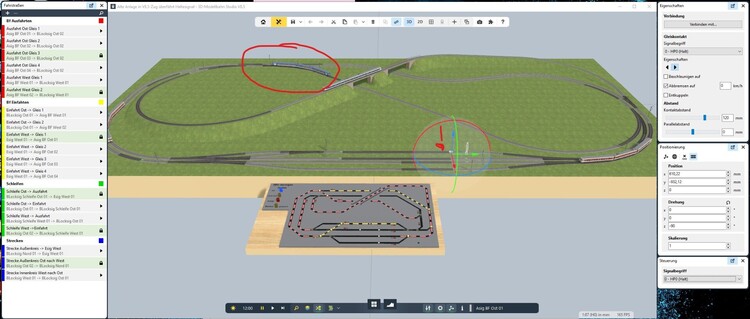
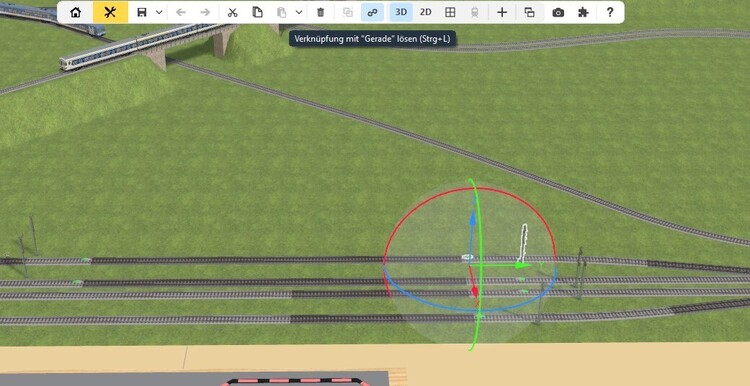
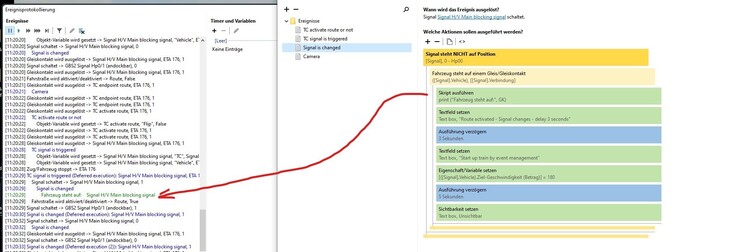
Hallo @Neo, bei dieser alten Anlage, tritt in V8.5 ein ungewöhnliches Verhalten auf. Direkt nach dem "Öffnen" der Anlage hält ein Zug (meistens) nicht vor einem Haltesignal. Das Signal steht auf "Hp0" und hat die Einstellung "Abbremsen auf "0". Die Fahrstraßen zeigen nicht an, das hier eine oder mehrere "ungültig" sein könnten. Im Ereignisprotokoll ist zu sehen, das der Zug den GK ignoriert. Ein Fehler wird nicht angezeigt. Die Verknüpfung des Signals mit dem Gleis scheint auch intakt zu sein. Hier die Anlage mit dem isolierten Problem. Alte Anlage in V8.5-Zug überfährt Haltesignal.mbp VG, Hawkeye

-
Anscheinend braucht er doch… Sein Motorfahrzeug ist die aktive Lok. Genau die erhält er doch auch in meinem Beispiel. (In welchem sie auch am Ende des Zuges steht und nicht vor dem Signal.) VG, Hawkeye
-
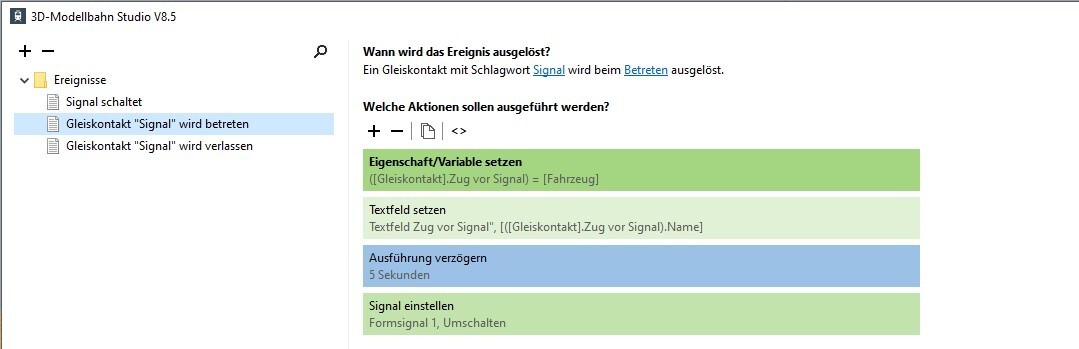
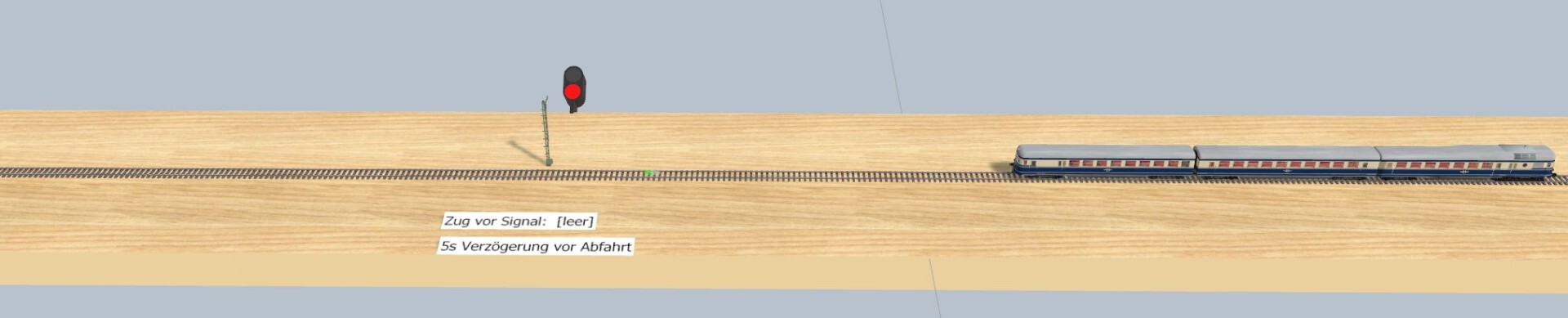
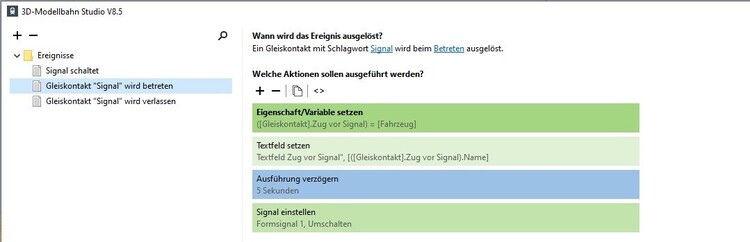
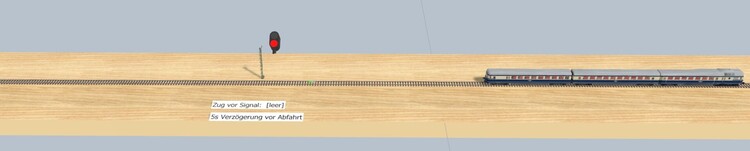
Dann ist es ja noch einfacher mit einem Schlagwort, wenn du den GK des Signals betritts. Die im GK vergebene Variable gilt dann auch für das Signal. Zug startet mit 5s Verzögerung.mbp VG, Hawkeye
-
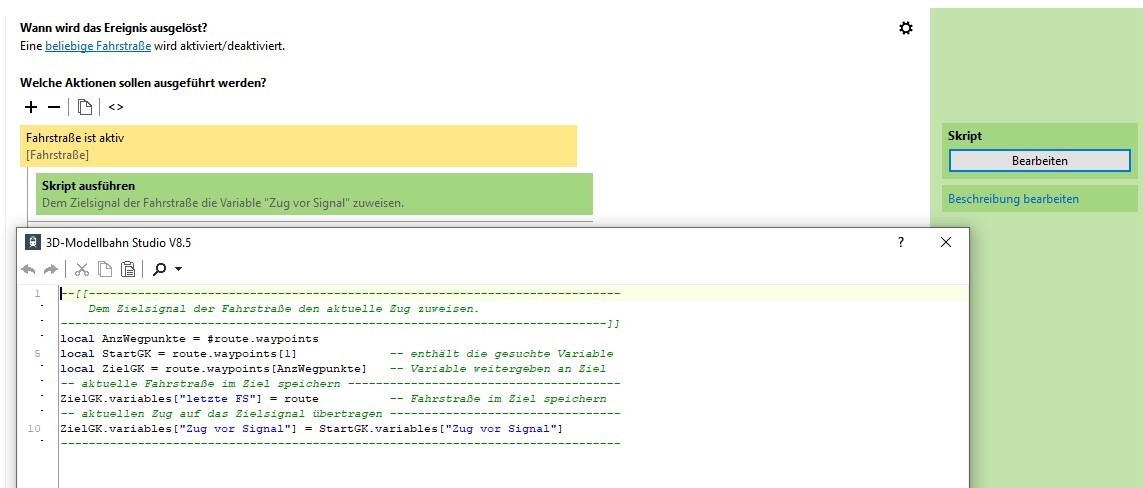
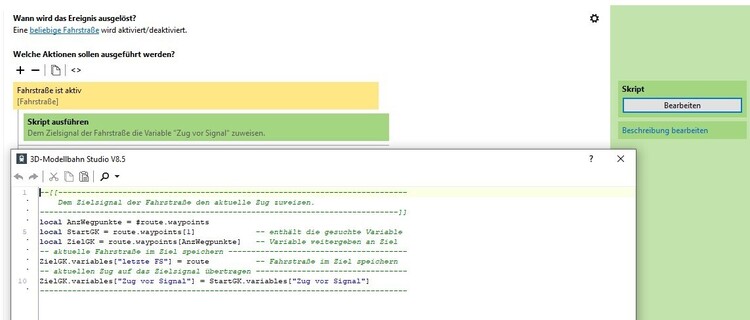
Hallo @Phrontistes, ich glaube, das du hier einen Gedankenfehler eingebaut hast. Denke etwas „anders“. 😉 Du möchtest das Fahrzeug ermitteln, das gerade auf ein Signal zufährt, ob es dort hält (weil HP0) oder nicht. Und wenn du, wie du schreibst, … dann kannst du dem Zielsignal der Fahrstraße auch den Zug zuweisen, der gerade auf dem Weg zum Zielsignal ist. Und das Fahrzeug dem du deine Rußpartikel verpassen möchtest, ist auch immer die Referenz des Zuges (aktive Lok) egal an welcher Position, ob vorne oder hinten ihm Zug. Wenn eine Fahrstraße auf „aktiv“ schaltet, dann kannst du das Zielsignal in Lua ermitteln und den Zug schon dem Zielsignal als Variable übergeben, bevor der Zug dort ankommt. Es kann auch nur einen geben. VG, Hawkeye
-
Äh, da bin ich der falsche Ansprechpartner. Da mußt du @Phrontistes fragen. Ich verwende solche Konstellationen und zusätzlichen Abfragen i.d.R. nicht. Bei mir bekommt das Signal den nächsten Zug rechtzeitig per Variable zugewiesen, wenn er auf das Signal zufährt, und dieser bekommt dann beim Schalten des Signals auf „Fahrt“ direkt die Geschwindigkeit zugewiesen, egal ob er auf dem GK steht oder nicht. VG, Hawkeye
-
Passiert mir manchmal auch noch.😁
-
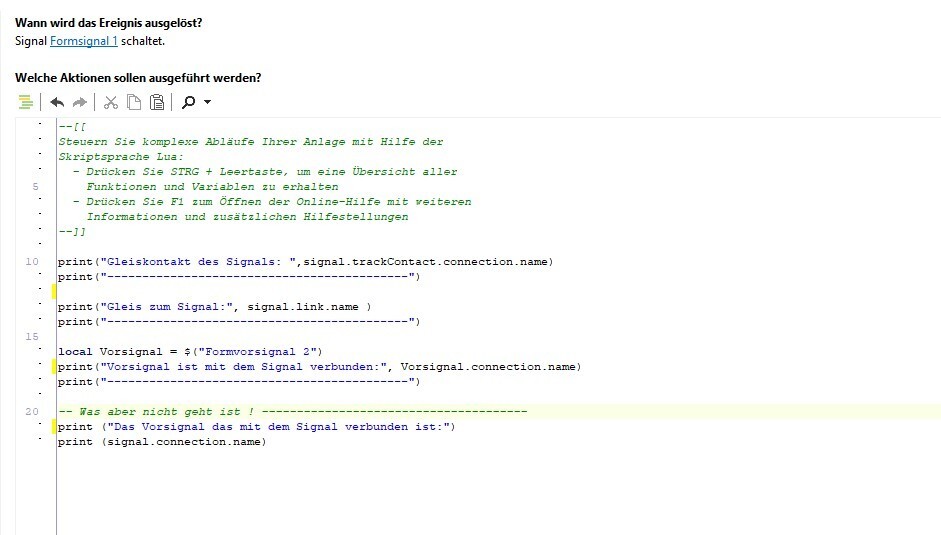
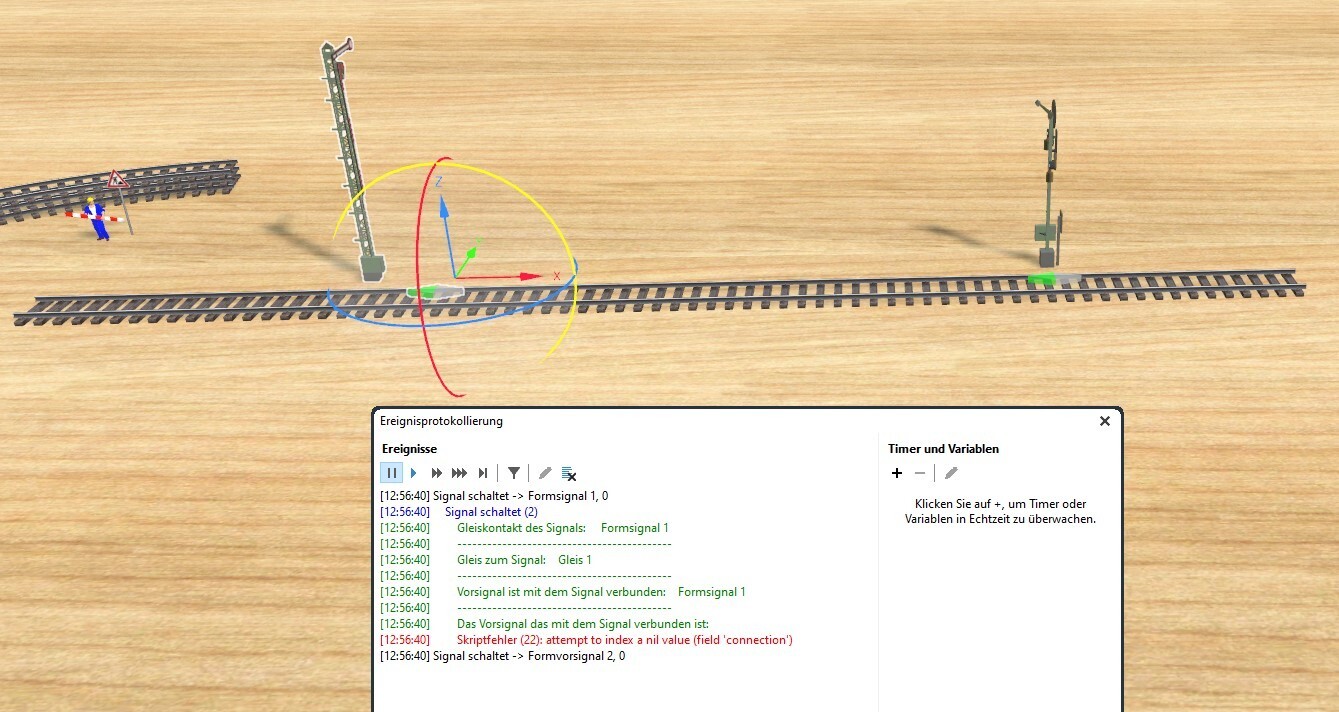
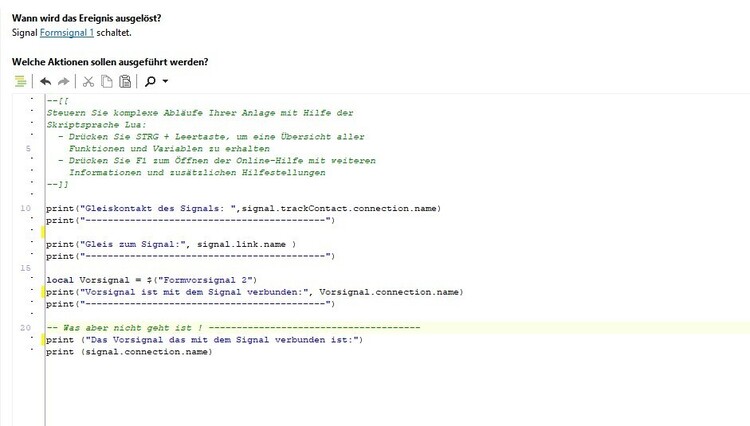
Nein. Die wird nicht geprüft. Doch. Ich bekomme den GK des Signals. Auch nicht. Siehe Beispiel.
-
So? Was denn? Wenn ich eine print-Anweisung einbaue, dann bekomme ich den GK des Signals.
-
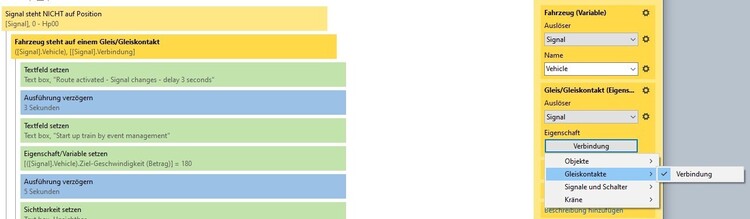
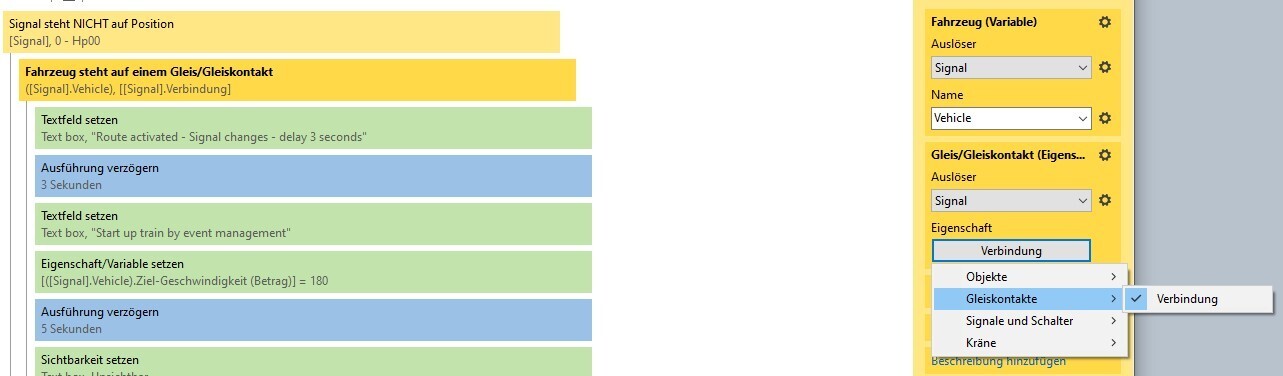
In der grafischen EV über die Eigenschaften des "Signals".