Hawkeye
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Hawkeye
-
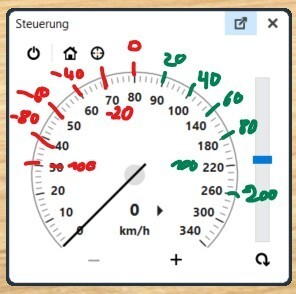
Hallo @Neo ich habe auch einen Einwand zum Steuerungsfenster. Ich werde mit der Darstellung der Anzeige auch nicht so richtig "warm". Aus meiner Sicht ist die Anzeige bis 340 km/h total überdimensioniert und "vorwärts" / "rückwärts" mit den viel zu kleinen Pfeilen nur schwer auseinanderzuhalten. Vorschlag: Setze doch die "0" auf 12:00h und detailliere nur bis 100 km/h alles was größer ist wird doch eh nur ganz selten genutzt und dann über die EV gesteuert. z.B,: VG, Hawkeye
-
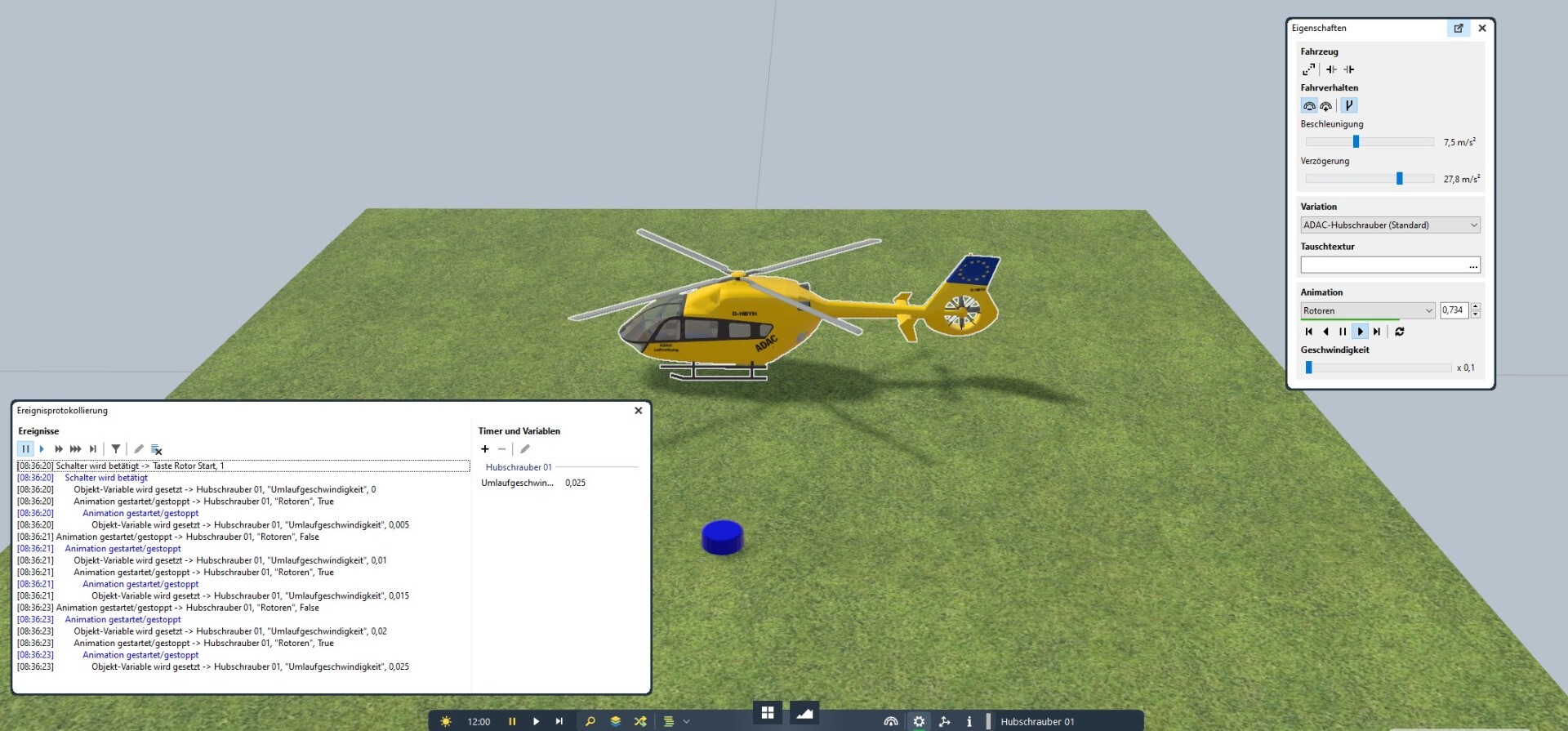
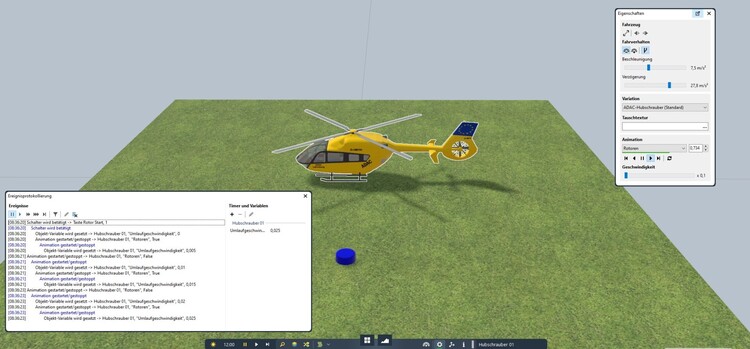
Hallo @Neo, habe gleich mal die neue Möglichkeit der Veränderung der Abspielgeschwindigkeit von Animationen am Hubschrauber ausprobiert. Hier die Testanlage. Hubschrauber Start mit V8.5.2.0.mbp Kann es sein, das die langsamste Einstellung mit 0,1 nicht unterschritten werden kann? Oder wird sie im Anzeigefeld der Eigenschaften nur nicht kleiner dargestellt? Für den Start (Anlaufvorgang) beginne ich mit einen Wert von 0,005, der wird aber anscheinend ignoriert und gleich auf 0,1 gesetzt. Kann der minimal Wert noch etwas reduziert werden. Gefühlt ist mir die langsamste Einstellung noch zu schnell. VG, Hawkeye
-
Hallo Neo, kannst du uns hierzu mit ein paar Details erfreuen. Wäre doch interessant mal zu erfahren, in welche Richtung du das Programm weiterentwickeln möchtest. VG, Hawkeye
-
In dieser Konstellation mit der Testanlage gebe ich dir recht. Aber wenn man ein Gleis mit einem Signal und Zusatzanzeiger (mehrfach) dupliziert und viele davon auf die Platte setzt, müssen die Zusatzanzeiger doch wieder manuell korrigiert werden, weil sie leicht verschoben sind. @Neo: So ganz ist das Thema leider noch nicht gelöst. Auch die alten Testanlagen mit verknüpften und gruppierten Objekten zeigen immer noch Verschiebungen. VG, Hawkeye
-
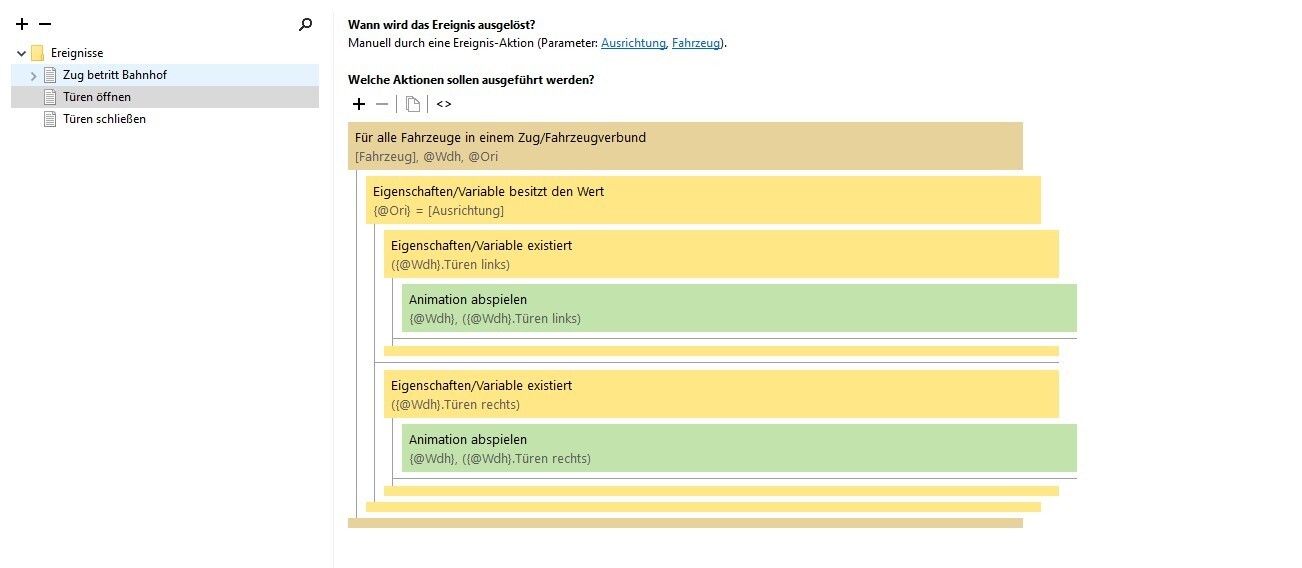
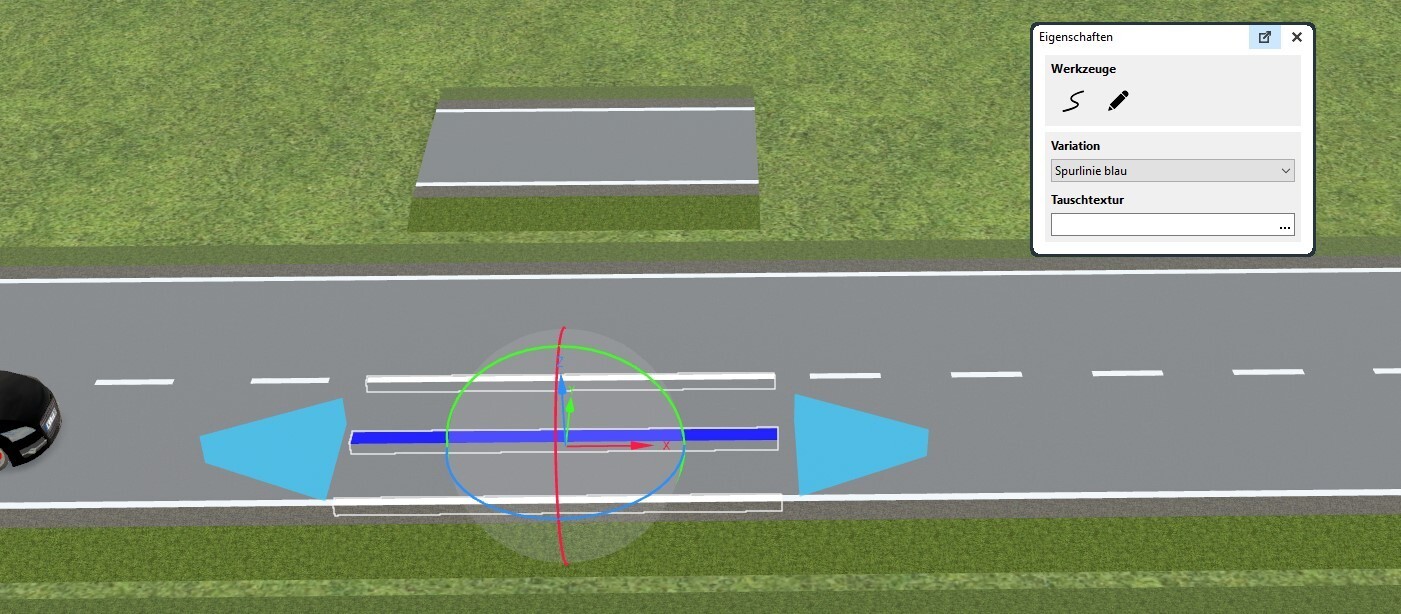
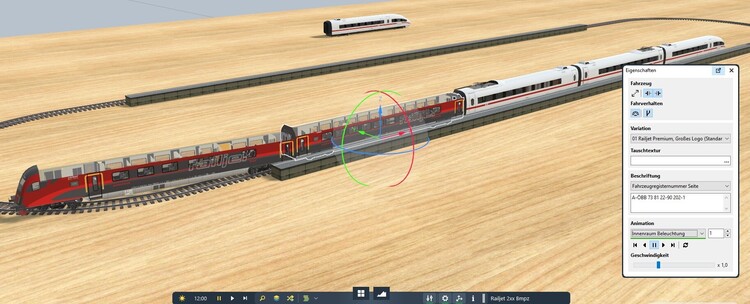
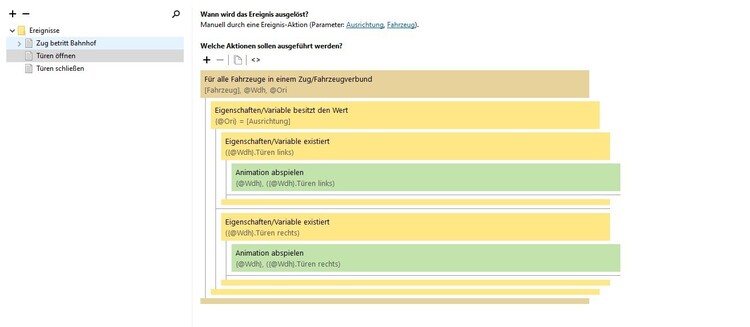
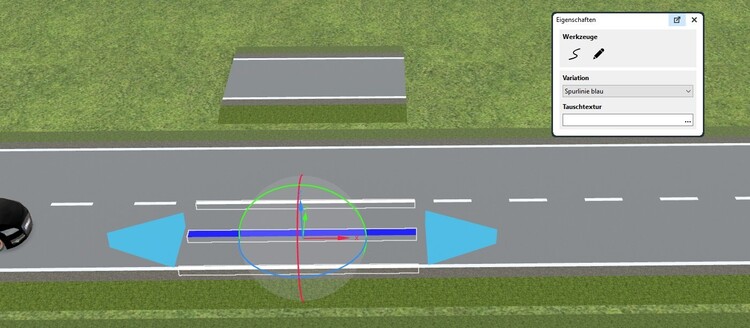
Hallo @Neo, habe mir mal dein Beispiel mit dem "Türen öffnen/ schließen" angeschaut und ein paar andere Wagen angehängt. Die erforderlichen Objektvariablen für die Türen habe ich zum Testen für diese zwei Wagen absichtlich mal nicht eingerichtet. Hier solltest du in der Demoanlage noch die Abfrage, ob die Objekt-Variablen auch tatsächlich existieren, integrieren. Noch besser wäre natürlich, eine programminterne Überprüfung auf das tatsächliche vorhanden sein und auf die Richtigkeit der Schreibweise einer Objekt-Animation. Sonst werden, wie im Bild oben alle vorhandenen Objekt-Animationen gestartet. Das ist ganz schön lästig und verwirrend. Die neue Funktion mit der Orientierung funktioniert ansonsten für die Fahrtrichnungen vorwärts und rückwärts gut. VG, Hakwkeye
-
Ja, jetzt wird ein Schuh daraus. Läuft, danke. VG, Hawkeye

-
Habe ich ja doch installiert!
-
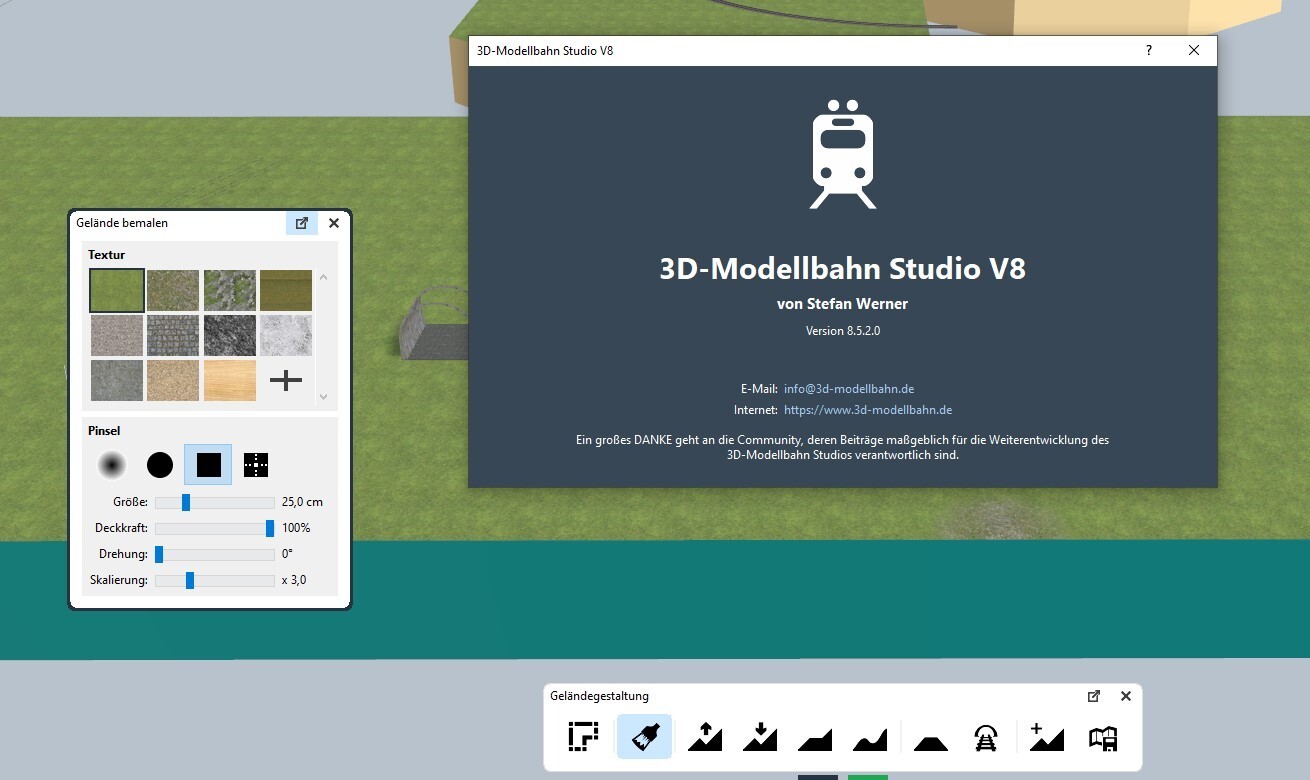
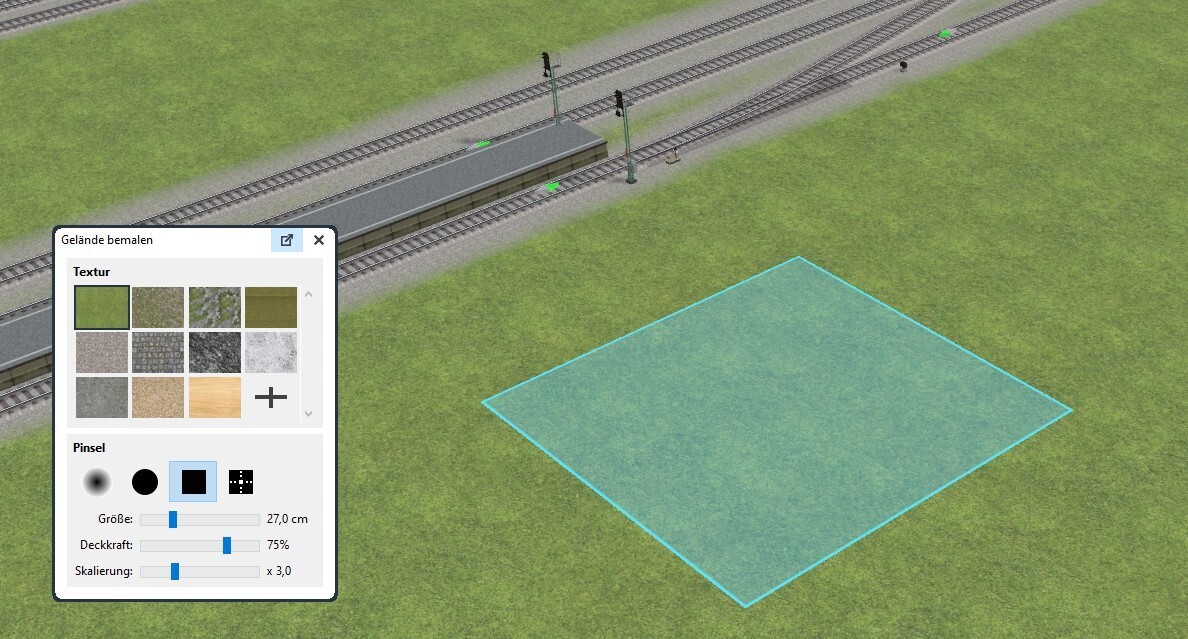
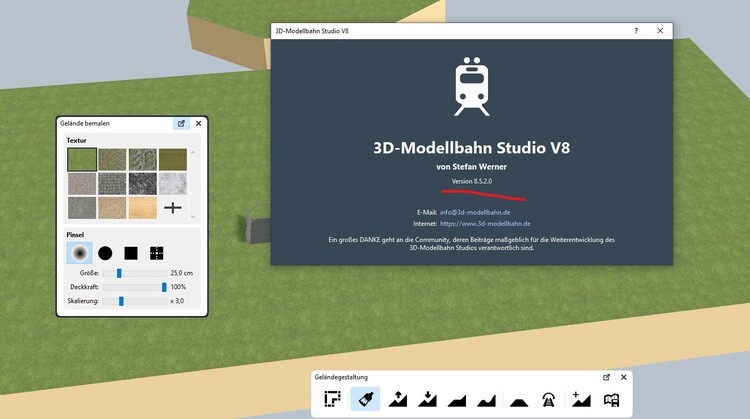
Hallo @Neo, Die Geländegestaltung erlaubt die Drehung von quadratischen Pinseln und wie wird das Quadrat gedreht? VG, Hakweye

-
Hallo @Thomas_103, wie Götz schon geschrieben hat: Da Du eigentlich nur zwei Zustände bei einer Animation mit „Licht“ hast, folglich Licht „an“ = 1 (Ende) und „aus“ = 0 (Anfang) kannst du es auch einfach mit der Funktion „Animation stoppen“ ausführen. Da spielt eine Richtung dann kein Rolle mehr und die Ausführungszeit der Animation wird übersprungen. Ist dann halt wie ein Schalter „an“ oder „aus“. VG, Hawkeye
-
Hallo @Thomas_103, das könnte man dir vielleicht erklären, …. 🤔 Dazu müsste man aber wissen, um welche Animation es sich von welchem Objekt handelt. Da du es uns aber nicht verraten möchtest, mußt du es hinnehmen wie es ist. VG, Hawkeye
-
Hallo @Thomas_103, doch, wenn man Fehler beim Starten von Animationen einbaut, treten solche Symptome auf. z.B. wenn der Name einer Animation nicht exakt abgeschrieben wurde. Aber ohne deine EV einsehen zu können, kann dir hier niemand helfen. VG, Hawkeye
-
Hallo, versuche mal diese Skript-Zeile in der Wiederholung: Wdh.variables[“Bezeichnung“] = keyword VG, Hawkeye
-
Wenn man rechtzeitig die Reihenfolge beim Erstellen beachtet, dann ja.😁 Da es sich aber meist um Gruppen mit Verknüpfungen handelt, die ich schon vor langer Zeit erstellt und als Gruppe unter „Eigene Modelle“ für den allgemeinen Gebrauch gespeichert habe, kommt es eben beim Neubau einer Anlage immer wieder zu diesen Effekten. Werde diese gespeicherten Gruppen wohl mal überarbeiten müssen. VG, Hawkeye
-
Hallo Götz, Es ist manchmal schwierig, eine vernünftige Reihenfolge von Verknüpfungen und Gruppierungen zu erstellen. Wenn ich ein mit einem Gleis verknüpftes Objekt unbeabsichtigt verschiebe, bleibt das Gleis an der alten Stelle. Deshalb gruppiere ich auch verknüpfte Objekte mit dem Gleis. Genauso ist es mit den Bausteinen. Verknüpfe ich die Bausteine einzeln mit den Gleisen, und ich möchte nicht das Gleis, sondern die Bausteine verschieben, trennen sich die Bausteine. Also werden auch diese gruppiert. Sollte beim Bau einer Anlage eigentlich nützlich und eine Vereinfachung sein, aber es treten eben diese ungewollten Effekte auf. Das es sich hier aber um einen neuen bisher nicht bekannten Effekt handelt, wollte ich @Neo den Effekt auch nur beschreiben und per reproduzierbarer Anlage zuschicken. Vielleicht gewinnt er ja dadurch neue Erkenntnisse woran es liegt. VG, Hawkeye
-
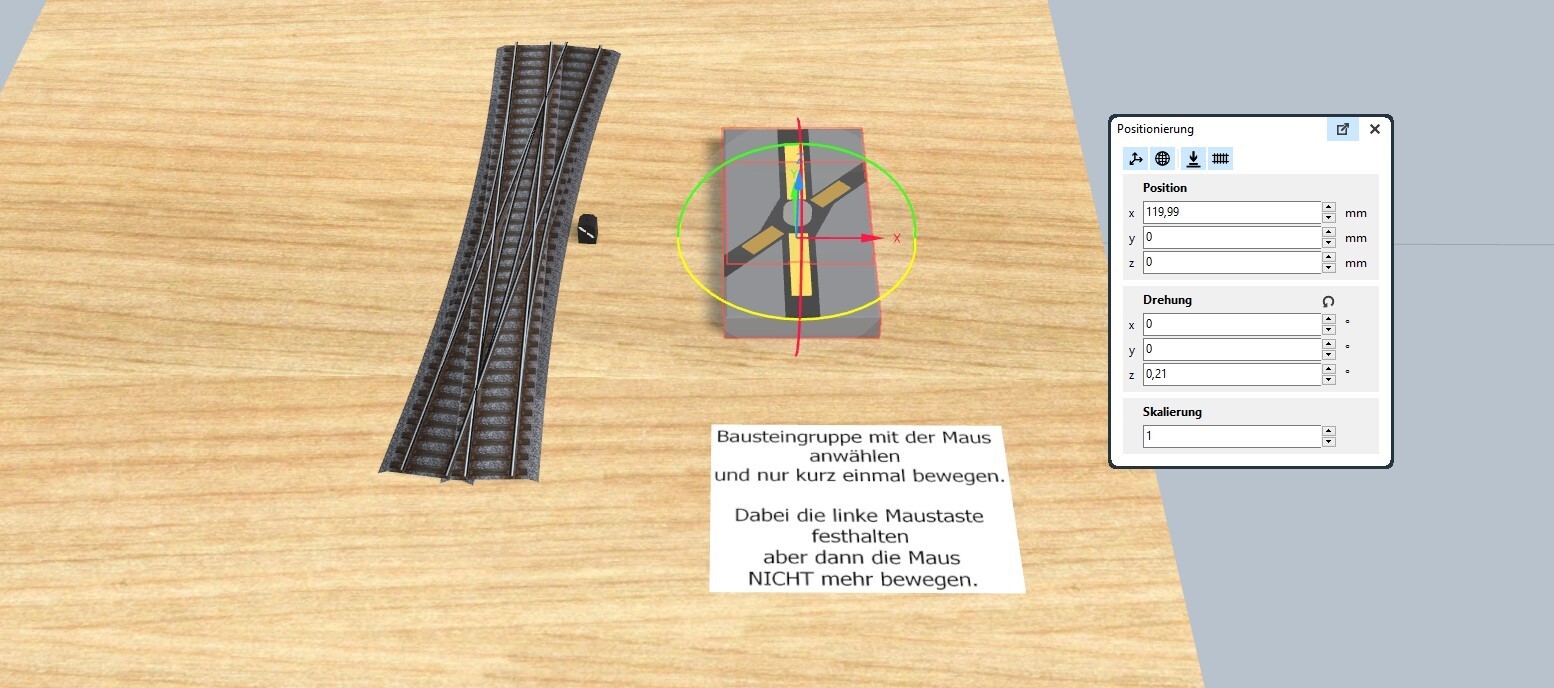
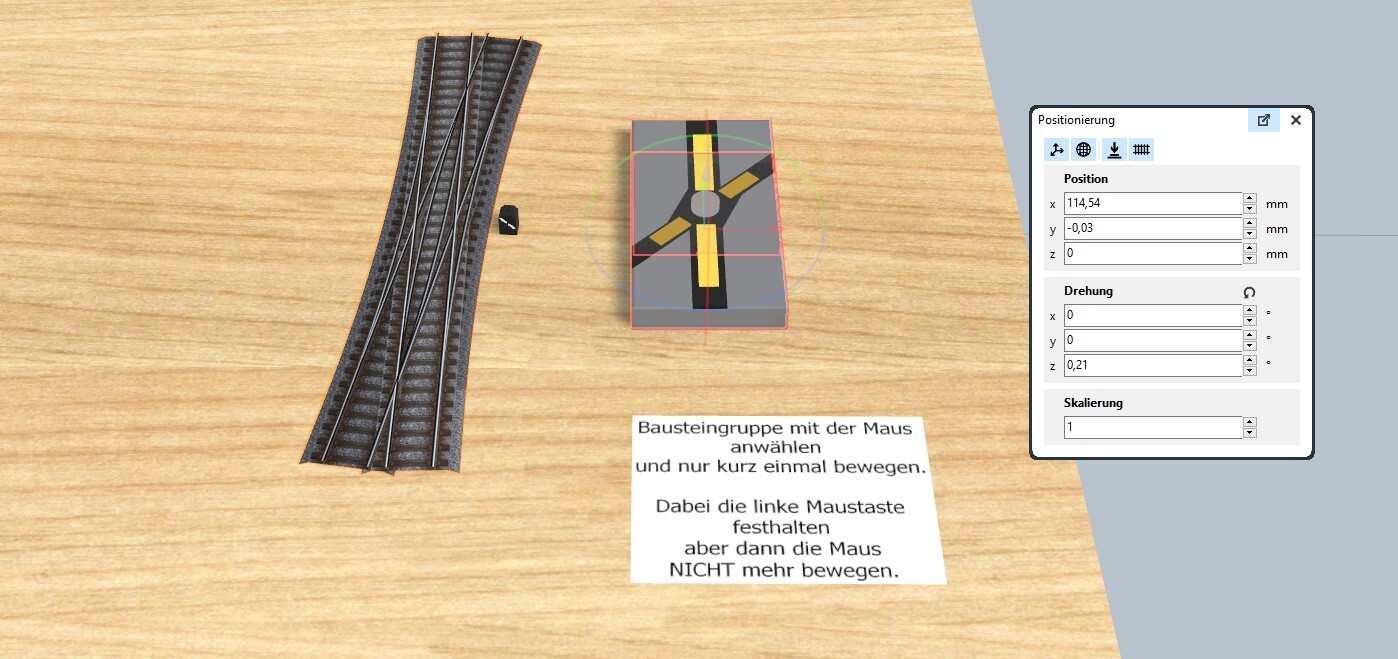
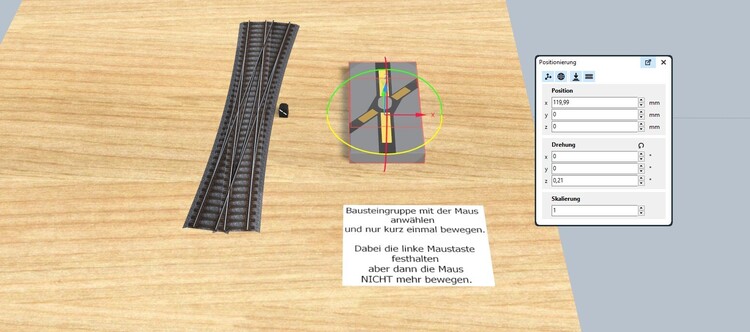
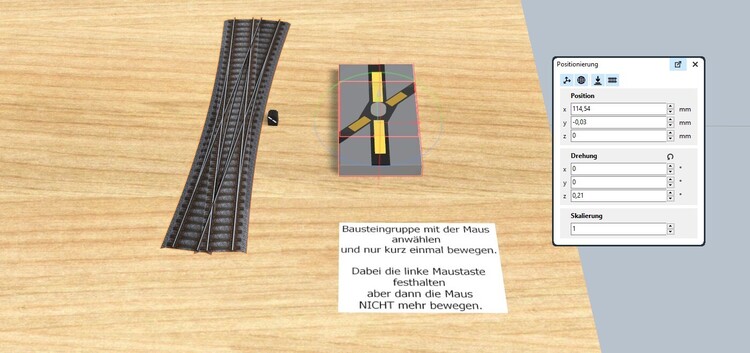
Hallo @Neo, ich habe ein merkwürdiges Verhalten beim Verschieben einer Gruppe festgestellt. Wenn ich ein Gruppe bei festgehaltener Maus nur ganz kurz bewege und dann die Maus stillhalte, bewegt sich die Gruppe langsam weiter (hier bei mir nach links). Im folgenden Bild zu erkennen an der kleiner gewordenen X-Position. Die Bewegung ist deutlich zu wahrzunehmen. Hier das isolierte Problem als Anlage. Ungewöhliches Verhalten einer Gruppe.mbp Dürfte aber nicht sein, oder? Ergänzung: Wenn man mit dem Gizmo die Gruppe rotiert, bewegt sie sich ebenfalls zusätzlich entlang der X-Achse. VG, Hawkeye
-
Hallo Tim, ich denke, das passt auch so. Man muss die Innenbeleuchtung ja nicht abspielen. Es reicht sie am "Ende" zu stoppen. Dadurch wird sie sofort eingeschaltet. VG, Hawkeye

-
perhaps …🤔 Industriegewerkschaft Metall (DDR) Die IG war Mitglied der Internationalen Vereinigung der Gewerkschaften der Werktätigen der Metallindustrie (IVG Metall)
-
Hallo @frenkyboy, hier mal eine Alternative. Ich habe die Werte für Beschleunigung und Verzögerung der Fahrzeuge auf sinnvollere Werte eingestellt und den Halt des Busses etwas optimiert. Beschleunigung steuern-Alternativ.mbp VG, Hawkeye
-
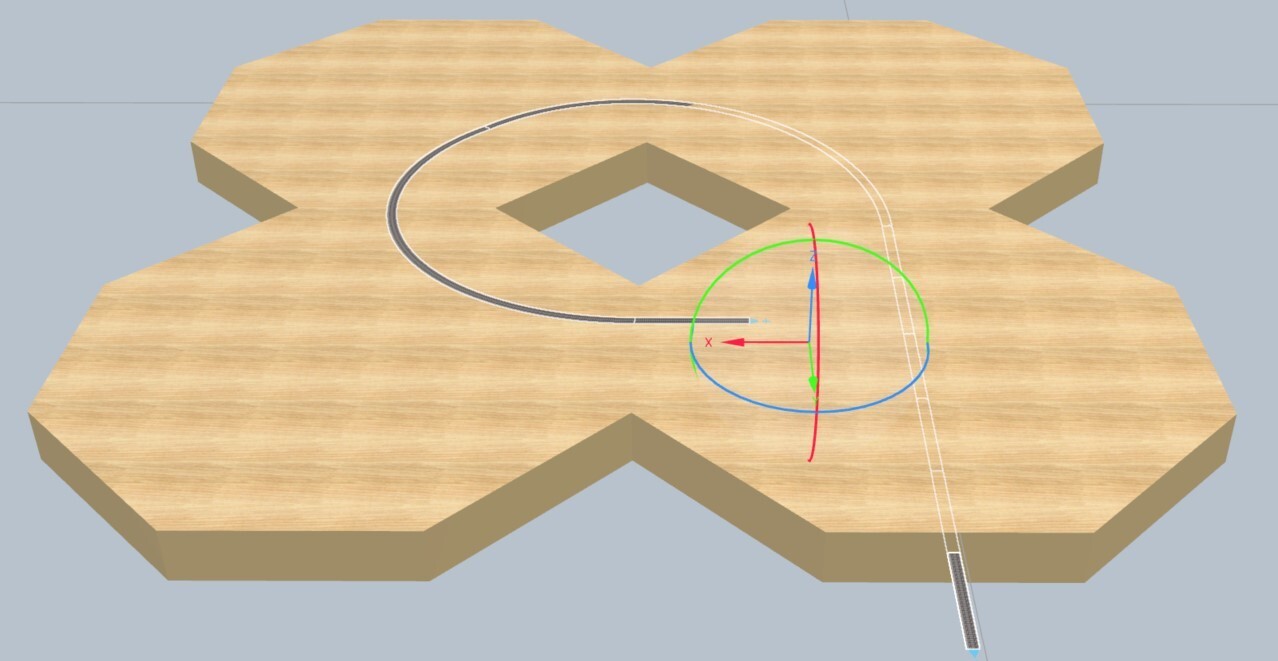
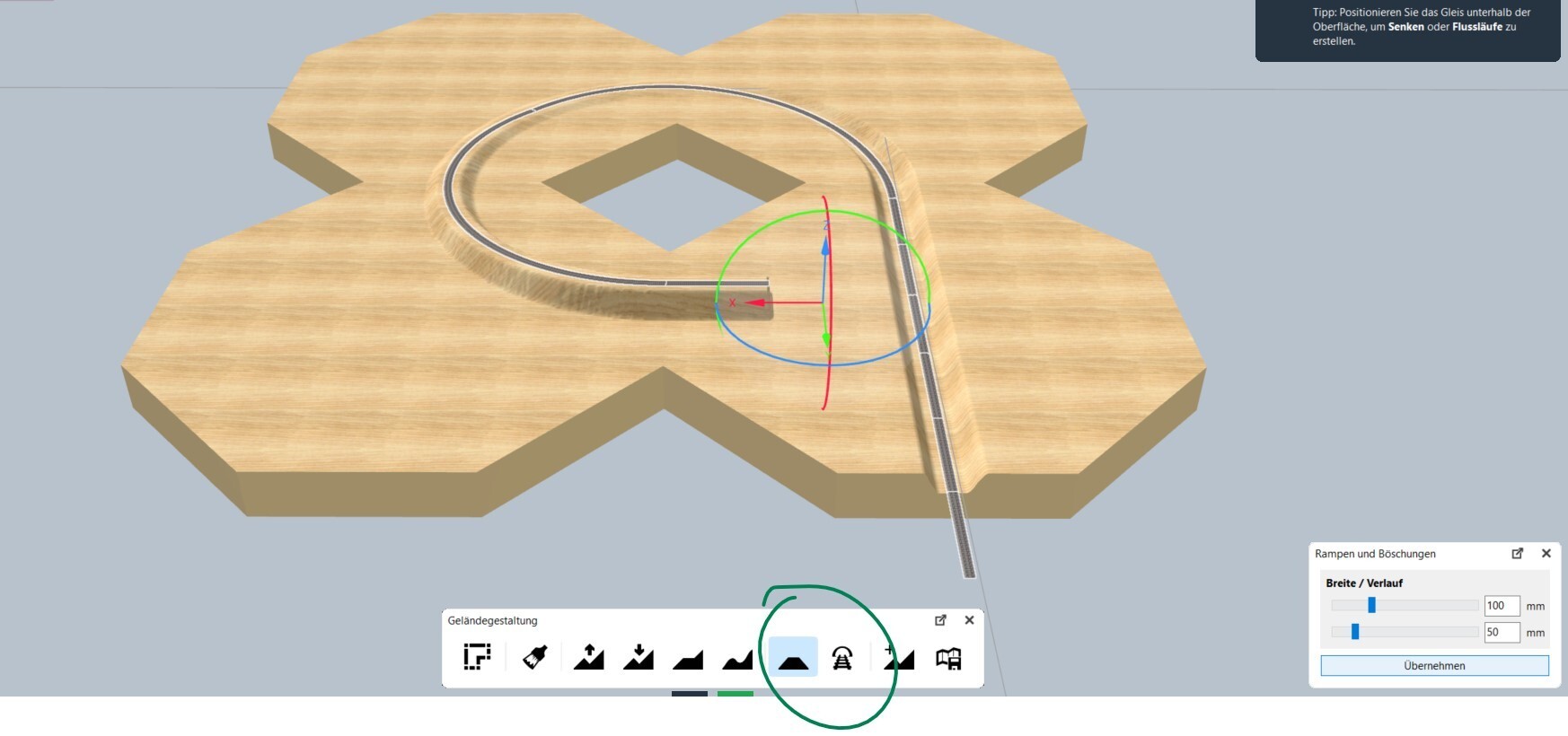
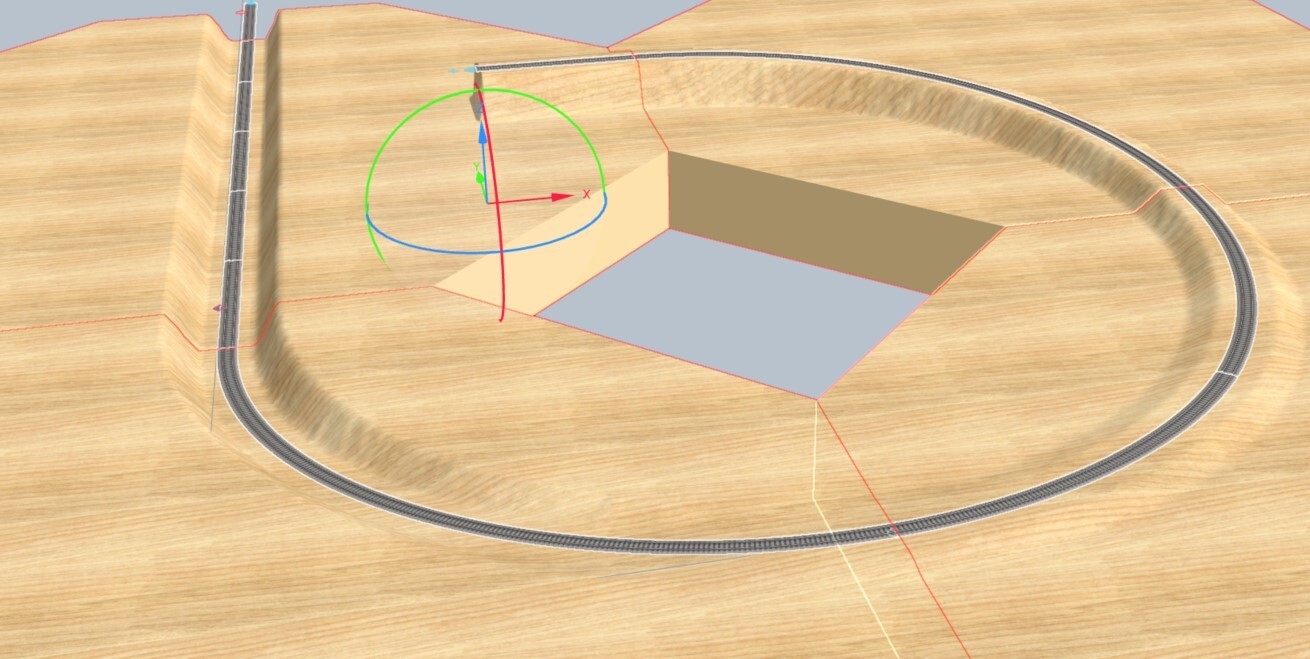
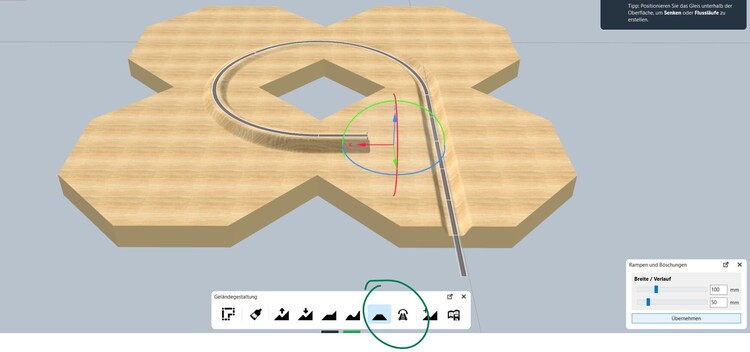
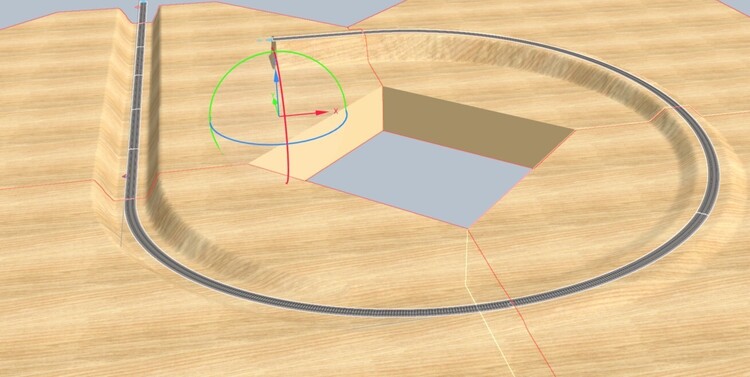
Hallo Götz, nicht wirklich. Die Funktion "Rampen und Böschungen" arbeitet auch Platten übergreifend. VG, Hawkeye
-
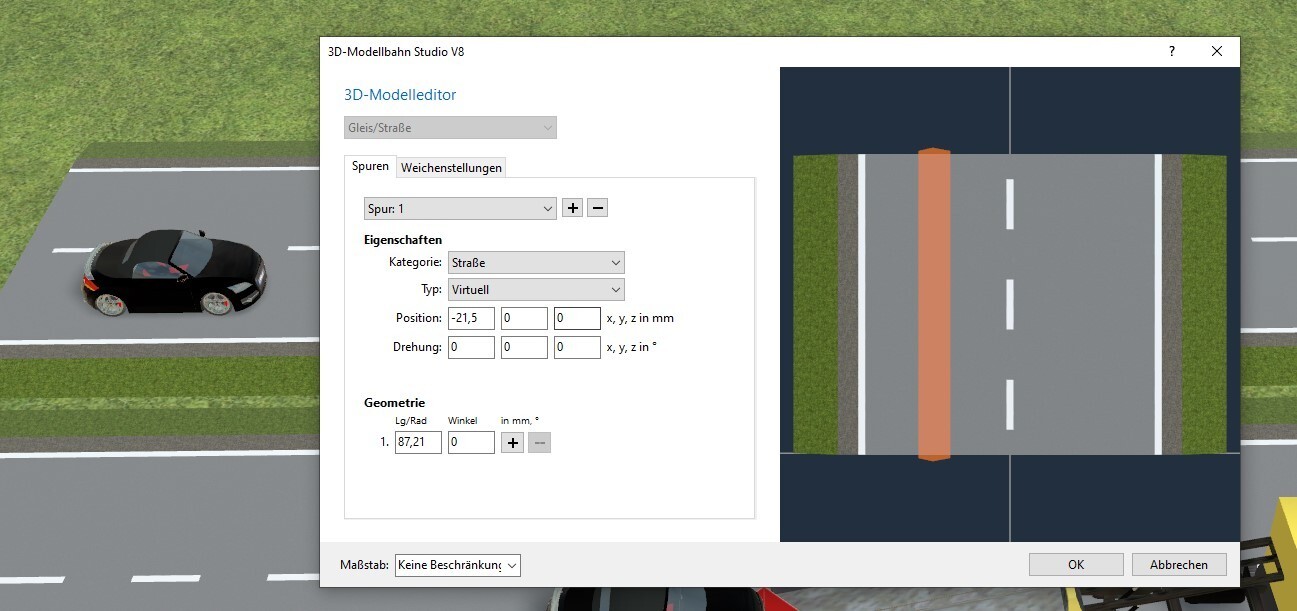
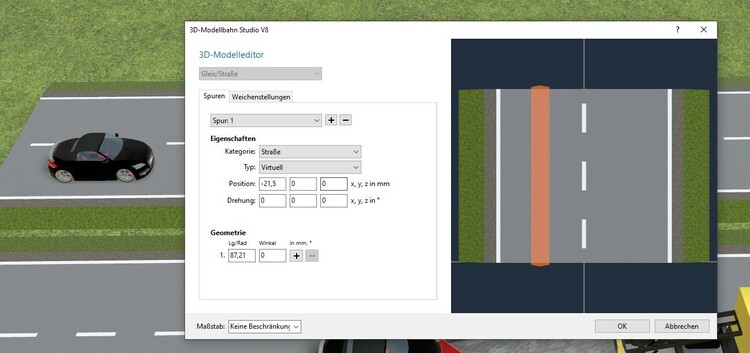
Doch, wenn du eine Spur löscht, und durch eine einspurige ersetzt. Dann kannst du Brummi's Tip auch umsetzten. Diese kannst du dann auch auswählen und ausblenden lässt sie sich auch. VG, Hawkeye
-
Hallo @Neo, mir ist in letzter Zeit schon öfter aufgefallen, das mache hier im Forum zum Download eingestellte Anlagen nur heruntergeladen werden können, wenn man auch eingeloggt ist. Beispiel: ohne eingeloggt zu sein. Normalerweise sind diese Anlagen doch frei zugänglich, so wie hier (auch ohne login) . Gibt es dafür eine Einstellung, oder passiert das zufällig und automatisch? VG, Hawkeye

-
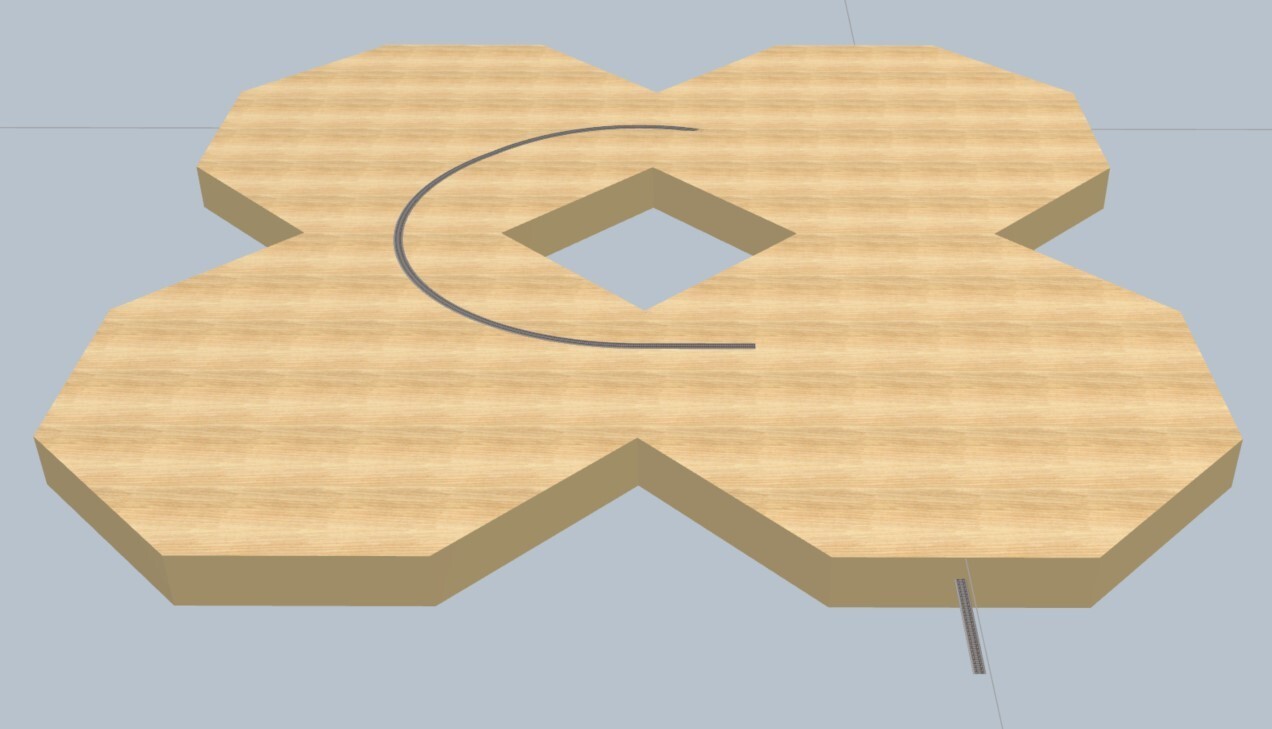
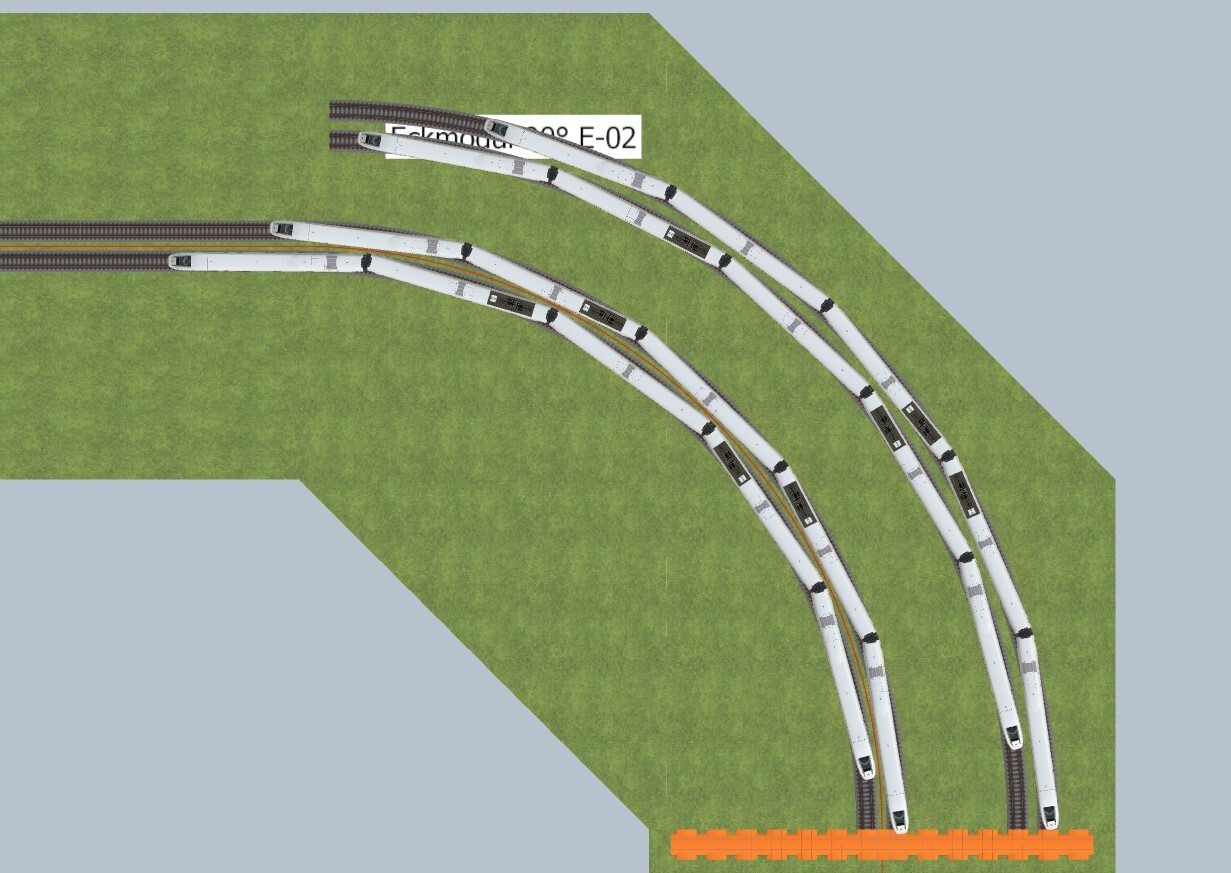
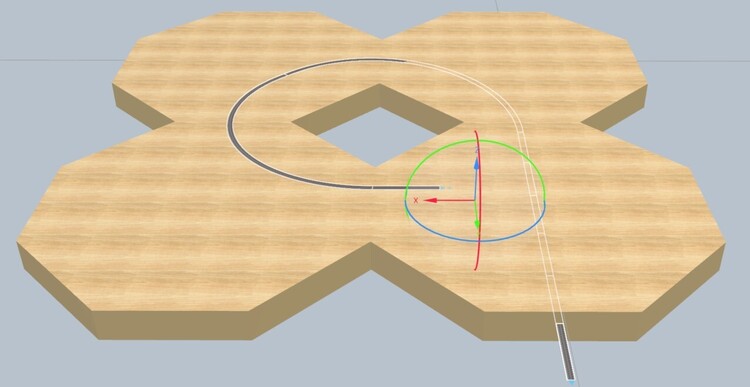
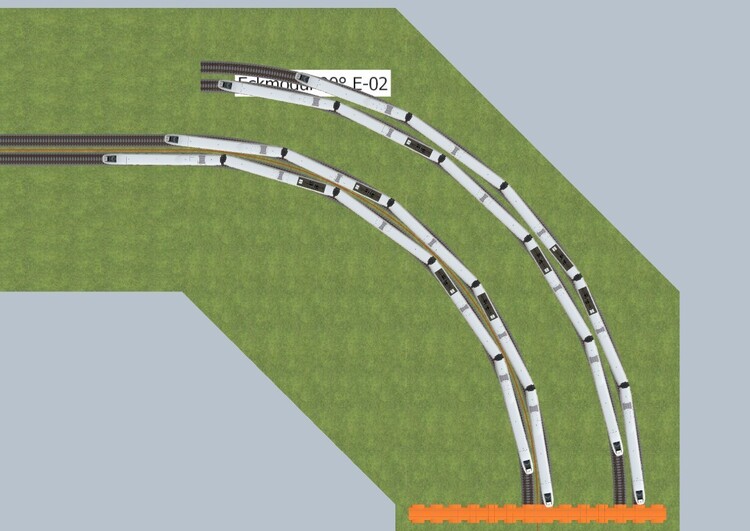
Moin, hier mal zur Erklärung für das gewählte Raster von 2x2m und dem mittlerem Radius R 1000. Ab diesem Radius kommen Züge mit lange Wagen in Kurven bei dem Gleisabstand von 4,5m (H0 = 51,73) gerade noch gut aneinander vorbei. Beispiel mit Oberleitung und Gleisverwindung. VG, Hawkeye

-
Hallo Henry, nicht schlecht. 😂 Aber ich habe extra den Winkel 45 Grad genommen, damit genau diese Zacken nicht auftreten. Die Kanten der Segmente sollten schon eine glatte Kante haben. VG, Hawkeye
-
Da hast du wohl recht. Hallo @Neo, Würdest du bitte den Titel des Themas auf „Basissegmente“ abändern, danke. VG, Hawkeye
-
Ist Walter alias Wolfgang? Es geht überhaupt nicht um Brummi‘s tolle Module, oder Höhenprofile. Natürlich sind diese durchdacht, ausgereift und liebevoll dekoriert. Allein um diese Frage. Viele im Katalog zur Verfügung gestellte Anlagen bestehen aus riesigen Bodenplatten, die natürlich auch mit entsprechend vielen Objekten bestückt sind. Das reduziert aber die Performance erheblich. Also warum nicht auf das Wesentliche konzentrieren und weg von großen Bodenplatten. Ich werden für mich ein solches System umsetzten. Mir gefällt z.B. nicht, das an dem antiquierten Gleisabstand von Märklin M-Gleisen und den viel zu kleinen Radien festgehalten wird. Für kurze und kleine Modelle mag das ausreichen. Ich möchte moderne Züge (z.B. ICE von Reinhard und Personenwagen von Bahnland oder Brummi) einsetzen. Ich stelle mir bei Parallelgleisen einen Gleisabstand von 4,5m und Radien um 1000mm vor. Bahnland hat doch ein geeignetes Gleissystem [1435] mit vielen passenden Gleisen und Weichen entwickelt. Mit solch großen Radien kann auch Brummi‘s Oberleitung vernünftig mit geraden Strängen von Mast zu Mast abgebildet werden. Das habe ich alles schon mal getestet. Ist aber alles noch im Anfangsstadium und der beginnt nun mal mit der Auswahl der Grundplatte! VG, Hawkeye