Hawkeye
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Hawkeye
-
Hallo @Neo, ist nur eine Vermutung. Da es sich hier auch um verknüpfte Objekte handelt und wohl wieder unterschiedliche Ergebnisse beim Laden einer Anlage erzielt werden, ein Hinweis auf ein anderes von dir bereits gelöstes Problem. Kann die Ursache hier auch in verschiedenen verwendeten Prozessoren liegen? VG, Hawkeye
-
Hallo @Neo, wenn man das Signal mit den Zusatzsignalen und dem Schild gruppiert und dann am Gleisende verschiebt, dann "lösen" sich die Kontaktpunkte der Zusatzsignale zum Signal. Kann man das abstellen? VG, Hawkeye


-
Dann sollten andere Forumsteilnehmer das wohl auch nochmal testen und ihre Ergebnisse hier einstellen. VG, Hawkeye
-
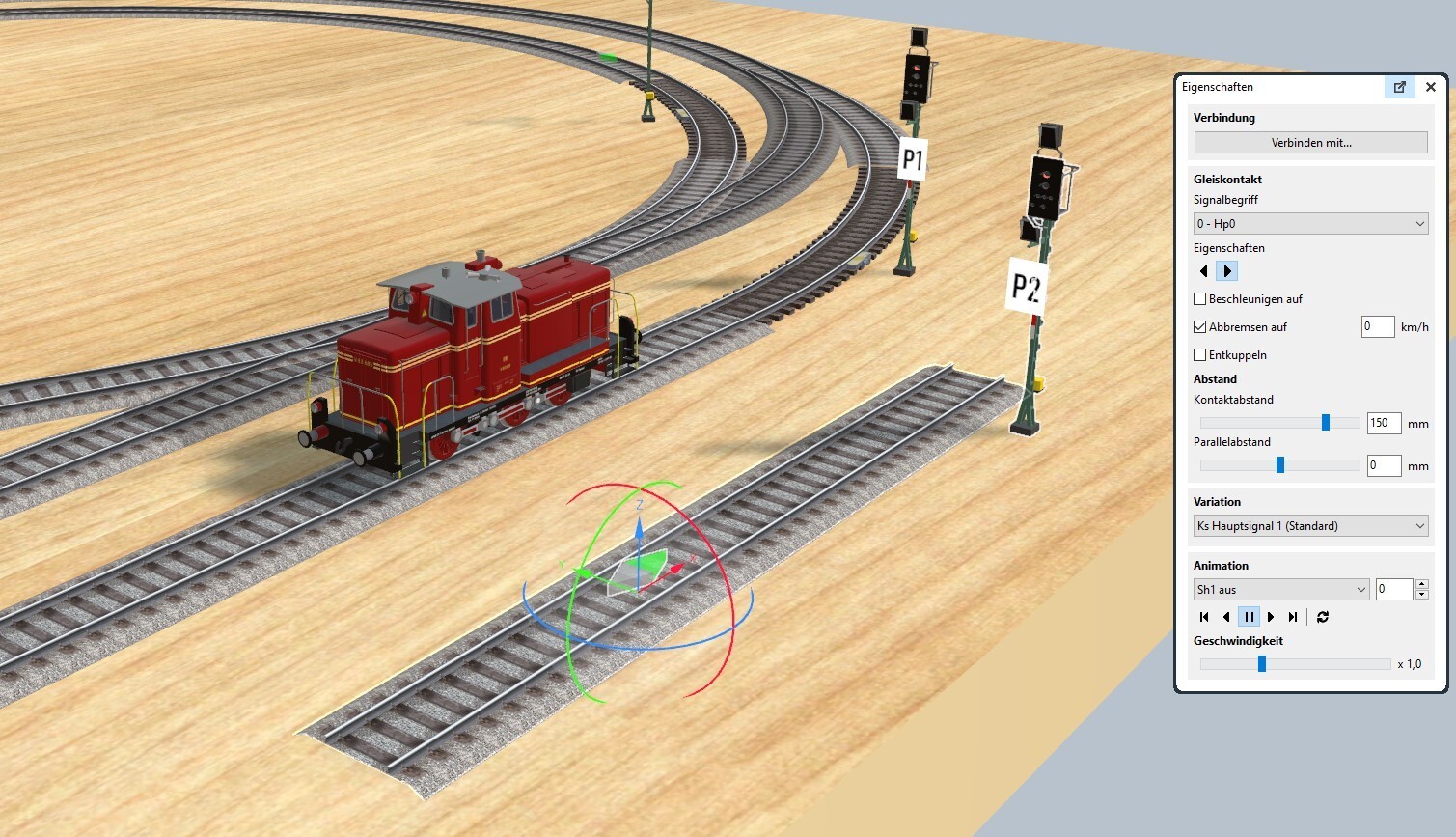
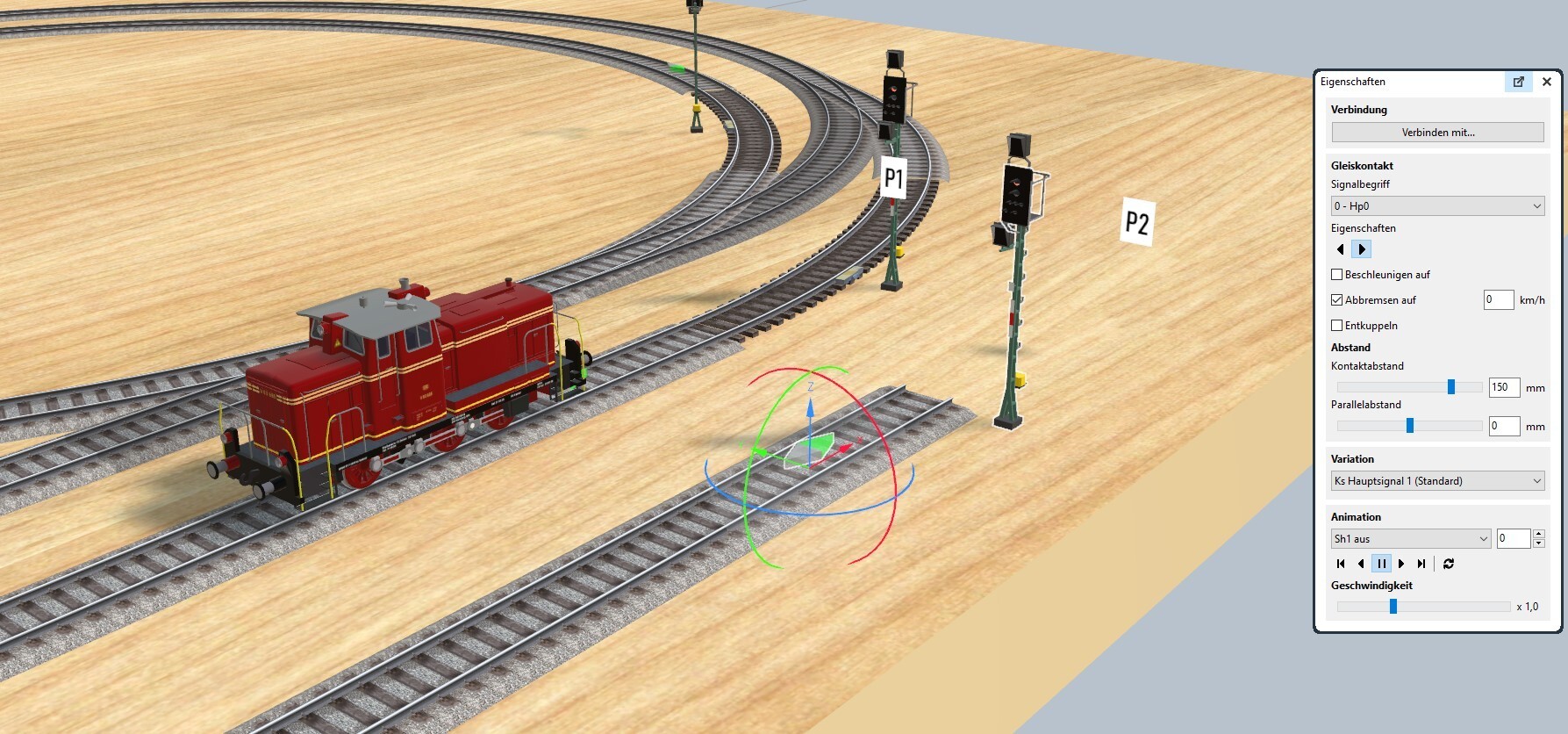
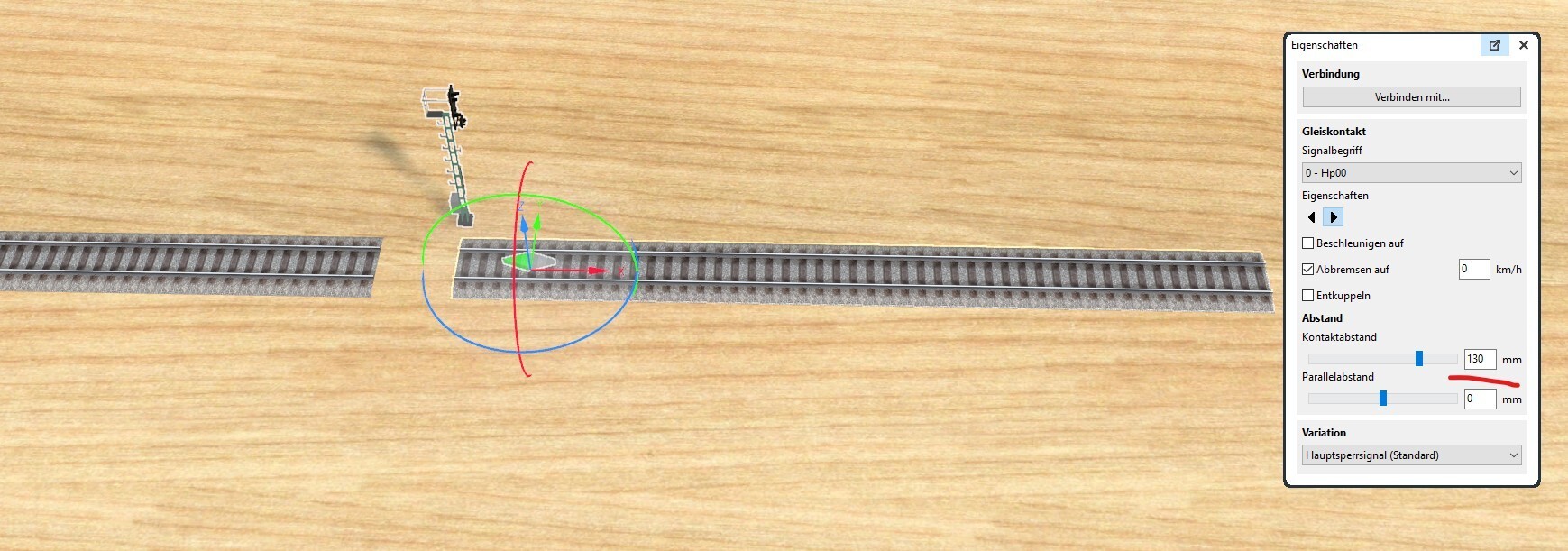
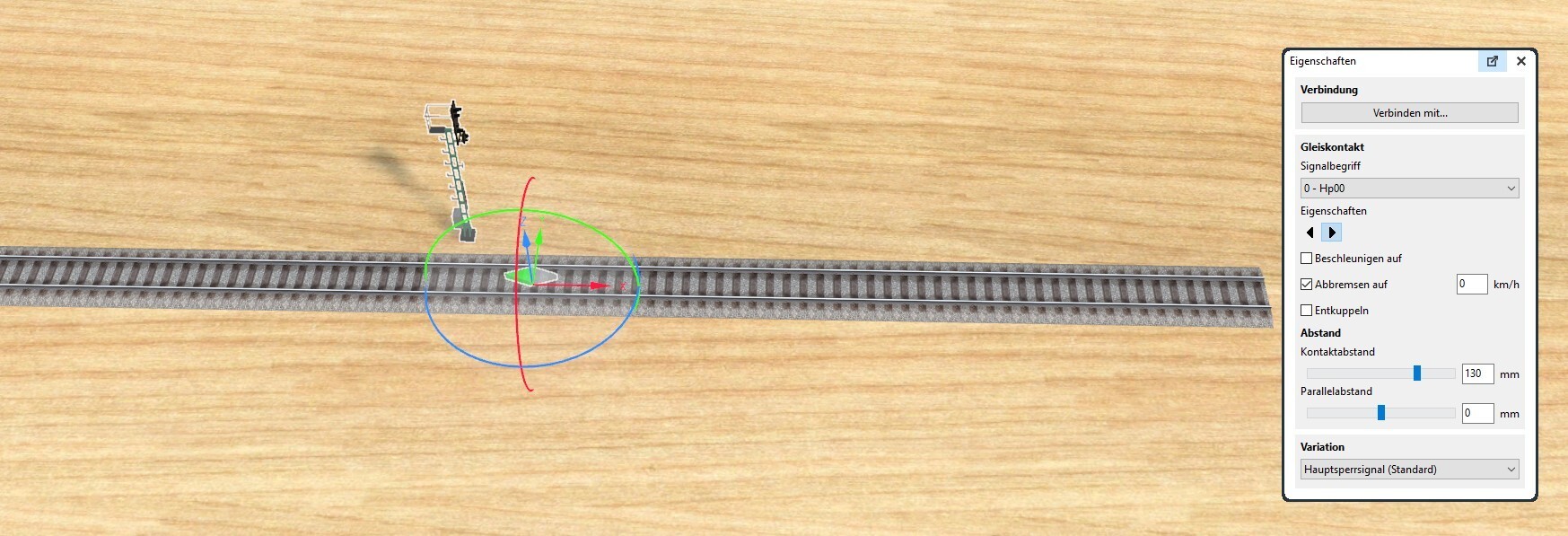
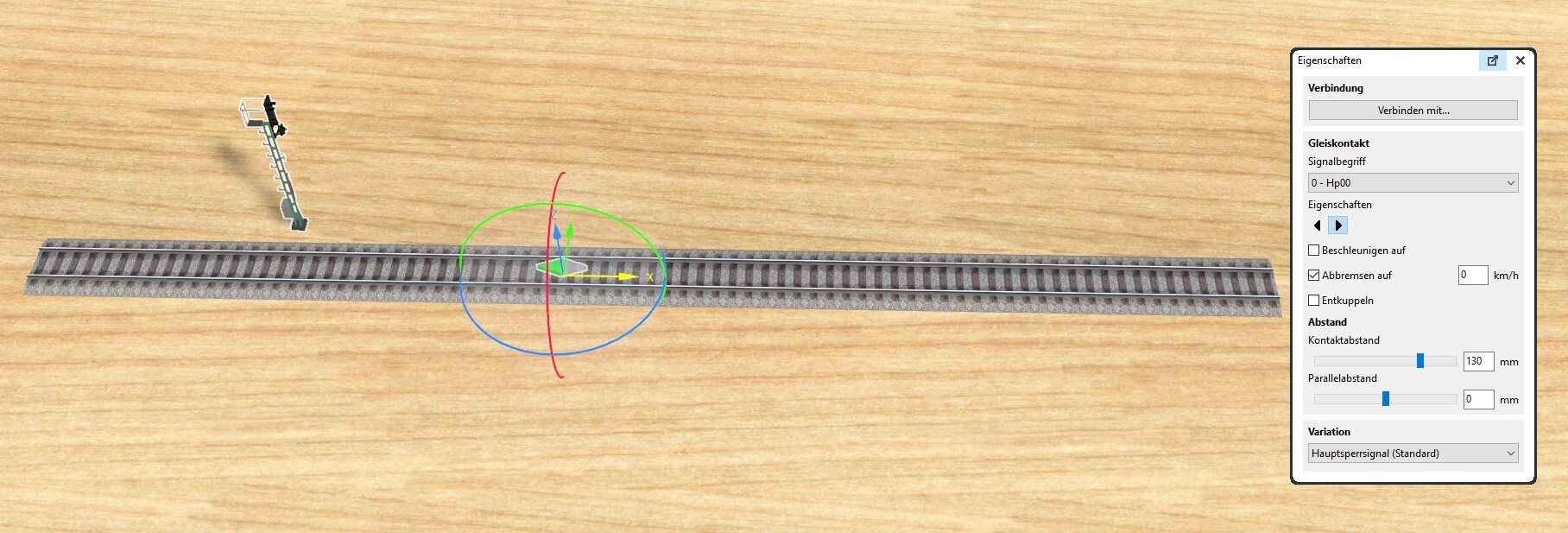
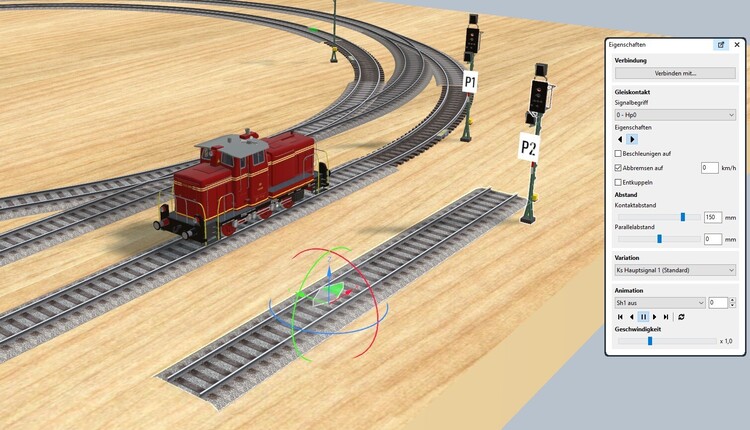
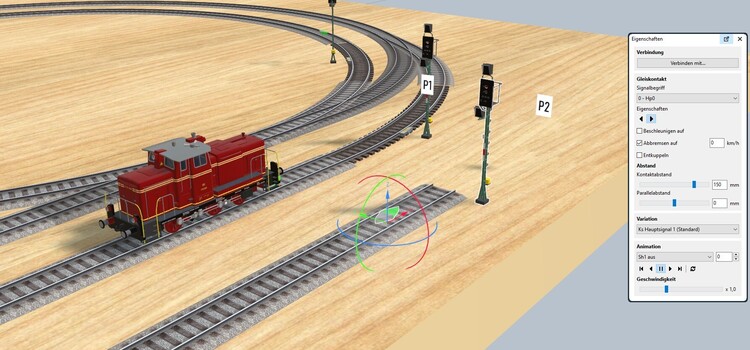
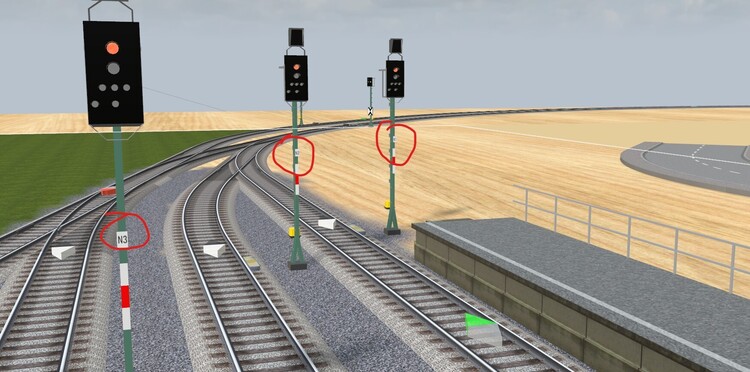
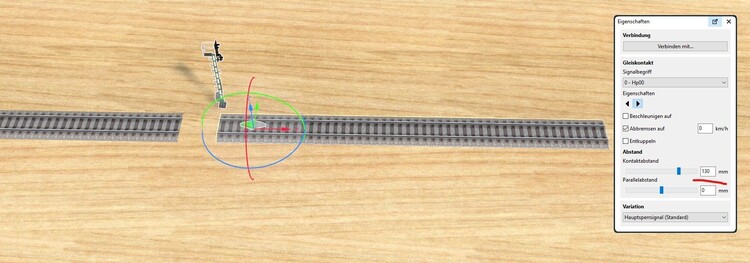
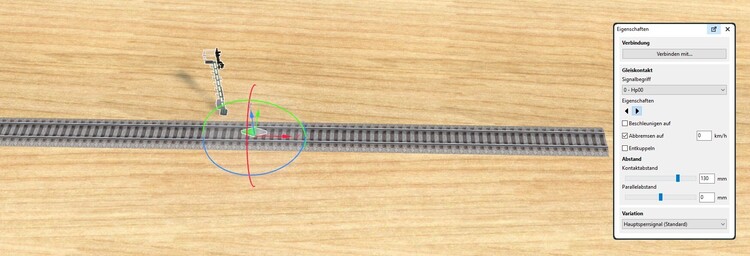
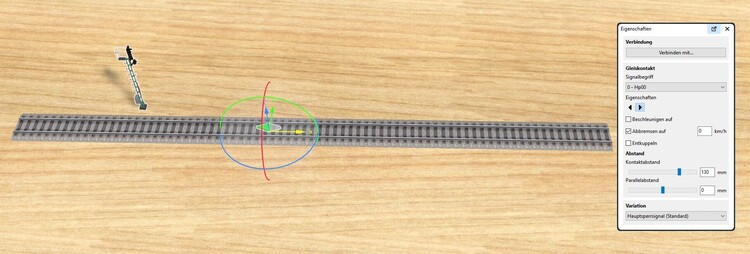
Hallo Andreas, wie du in einem anderen Thread geschrieben hast: "Das Problem trat erstmals in Version 7 auf. Ich hatte über den Fehler hier berichtet. Sollte eigentlich behoben sein." Danke für den Link. Deshalb mache ich auch hier weiter. Dieses Verhalten "nach jedem neuen Laden ..." kann ich jetzt nicht mehr mit deiner obigen Anlage, weder in V7 noch in der V8.5 nachvollziehen. Auch auf einer neuen kleinen Testanlage, bei der alle Signale über einen Gleisstoß hinweg platziert sind, taucht dieser Fehler nicht mehr auf. Nach dem Speichern und Neuladen sind die Signale weiterhin in ihrer unveränderten Position. Sollte diese Problem wieder auftreten, dann muss es einen anderen, wohl eher anlagenspezifischen, Grund geben. Das einzige was mir aber zufällig aufgefallen ist. (Hier ein Bild aus deiner Anlage) Ein mit dem Signal verknüpftes Objekte (wie das kleine Nummerierungsschild in deiner Anlage, in der Testanlage vergrößert dargestellt) ist eigentlich mit dem Gleiskontakt und nicht mit dem Signal verbunden. Ändert man den Kontaktabstand an einem Gleisende bleiben die Zusatzanzeiger, die per Kontaktpunkt mit dem Signal verbunden sind in ihrer Position, nicht aber ein Objekt, das per Verknüpfung scheinbar mit dem Signal verbunden wurde. (hier das Nummerierungsschild). Hier bleibt der eingegebene Kontaktabstand zwischen Gleiskontakt und dem Schild erhalten. Da sich die reine Verknüpfung aber wohl auf den Mittelpunkt eines Objektes bezieht, dürfte dieses Verhalten erklärbar sein, da der Mittelpunkt der Kombination Signal/Gleiskontakt ja der Gleiskontakt ist. VG, Hawkeye
-
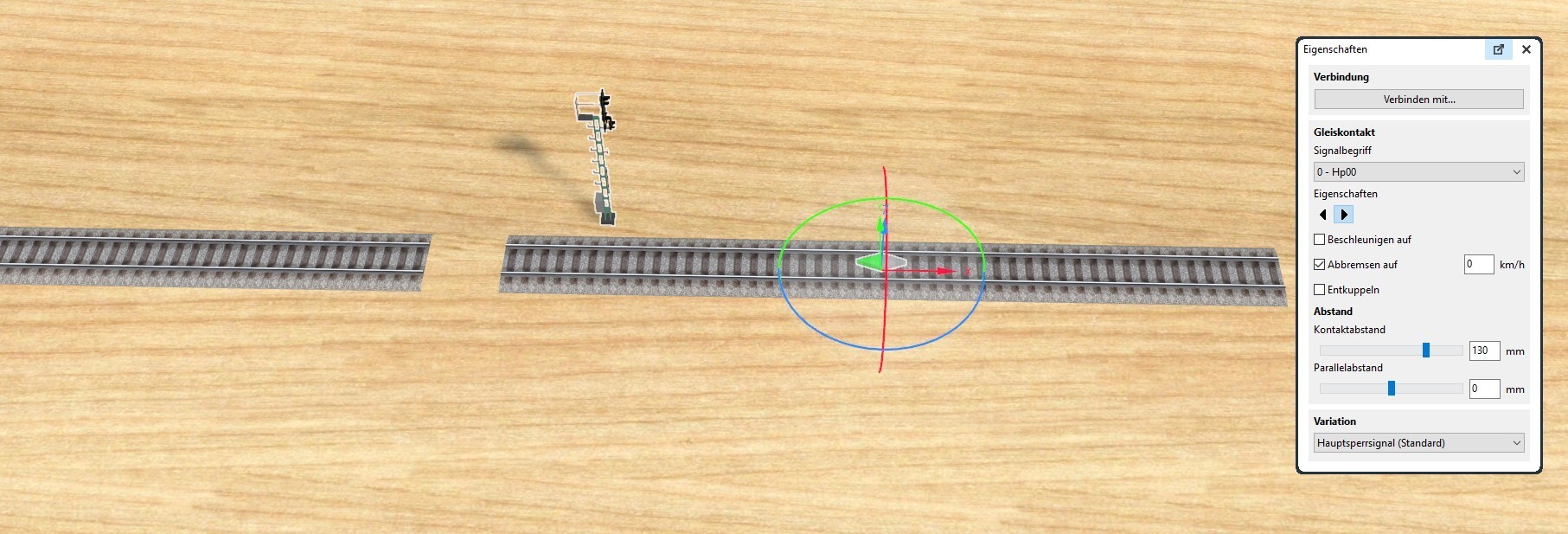
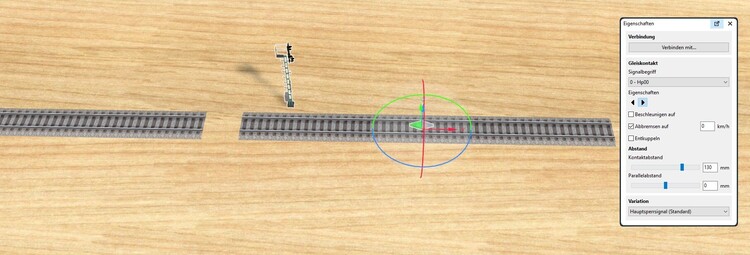
Hallo Phrontistes, das ist aber ein bekannter Effekt, der eigentlich dann auftritt, wenn man an den Gleisen an denen die Signale stehen, etwas verändert. Mach mal folgenden Versuch. Stelle ein Signal auf ein Gleis und stelle einen Kontaktabstand z.B. 130mm ein. Jetzt schiebe den GK nach links. Die Einstellung "130" bleibt im Signal erhalten, obwohl sich der Abstand deutlich verringert hat. Setzt man dann ein neues Gleis an, und bewegt den GK nur unwesentlich wird sofort der Abstand "130" wieder eingestellt. Daher vermute ich, das bei dir an diesen Stellen ein Gleisstoß vorhanden ist und an den Gleisen wohl mal etwas verändert wurde. Und dieser Zustand dann auch gespeichert wurde. VG, Hawkeye
-
Hallo Tim, perfekt. Gefällt mir „blinkend“ noch viel besser. . Schön das du es als Variation gemacht hast, da kann es sich dann auch jeder nach eigenem Geschmack aussuchen. Dir noch viel Erfolg bei deinem Studium. VG, Hawkeye
-
Hallo @tim-fischertechnik, super Modell, Hoffentlich kommt es bald in den Katalog. Da auch beim Überfahren einer Position der Taster kurz aufleuchtet, wäre mein Wusch "weiß blinkend", während die Bühne fährt, und "aus" wenn die Position erreicht ist. Das grau ist ein "büsschen dünne". Ist aber nur ein Vorschlag. VG, Hawkeye
-
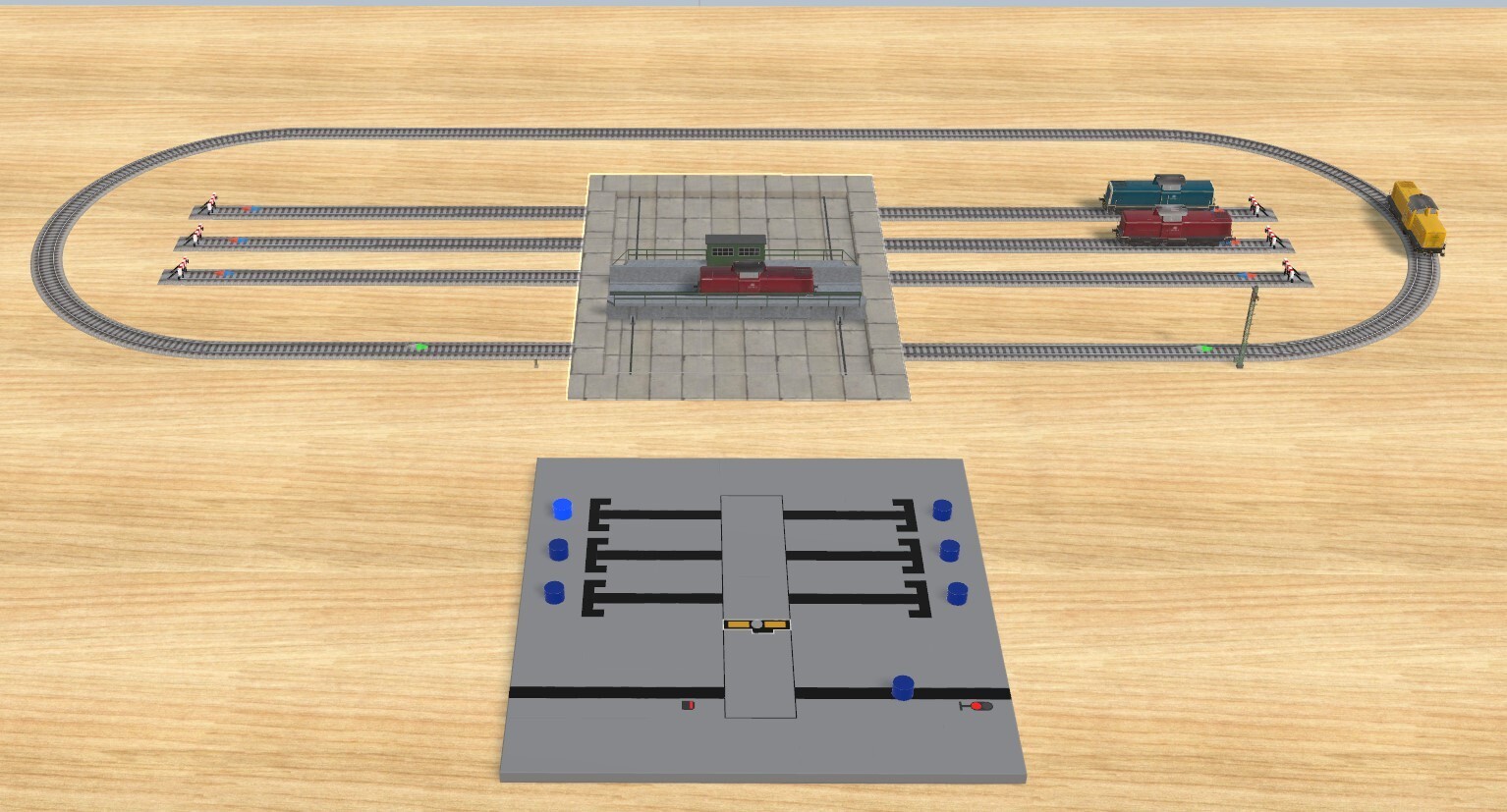
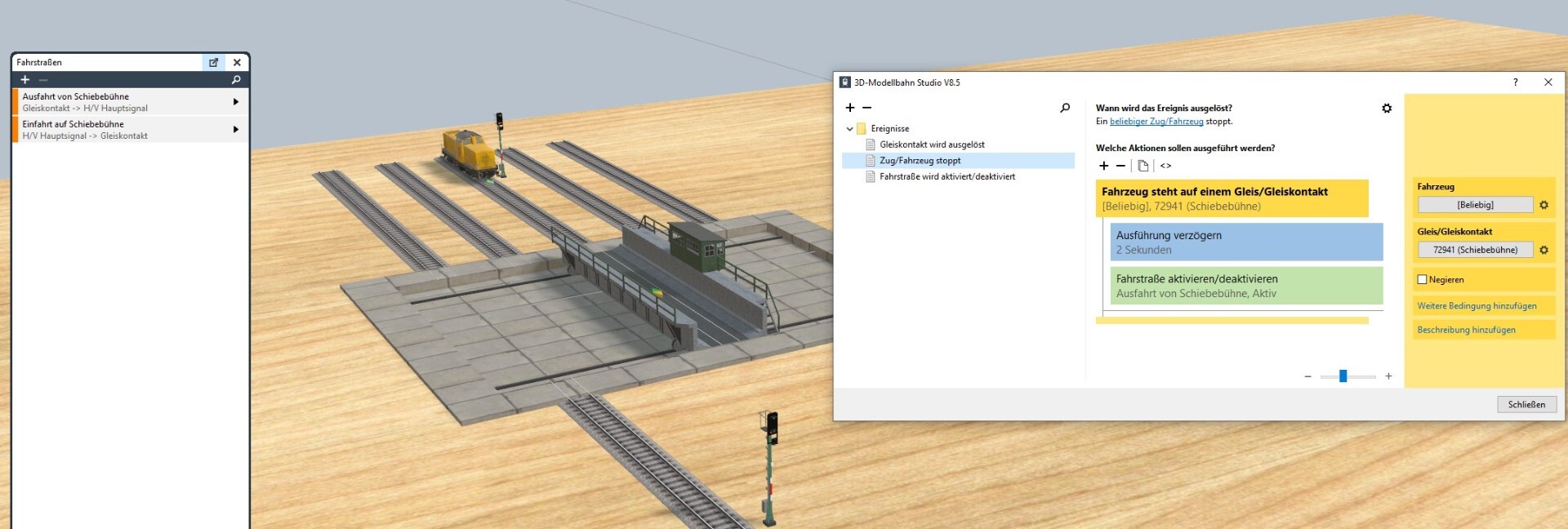
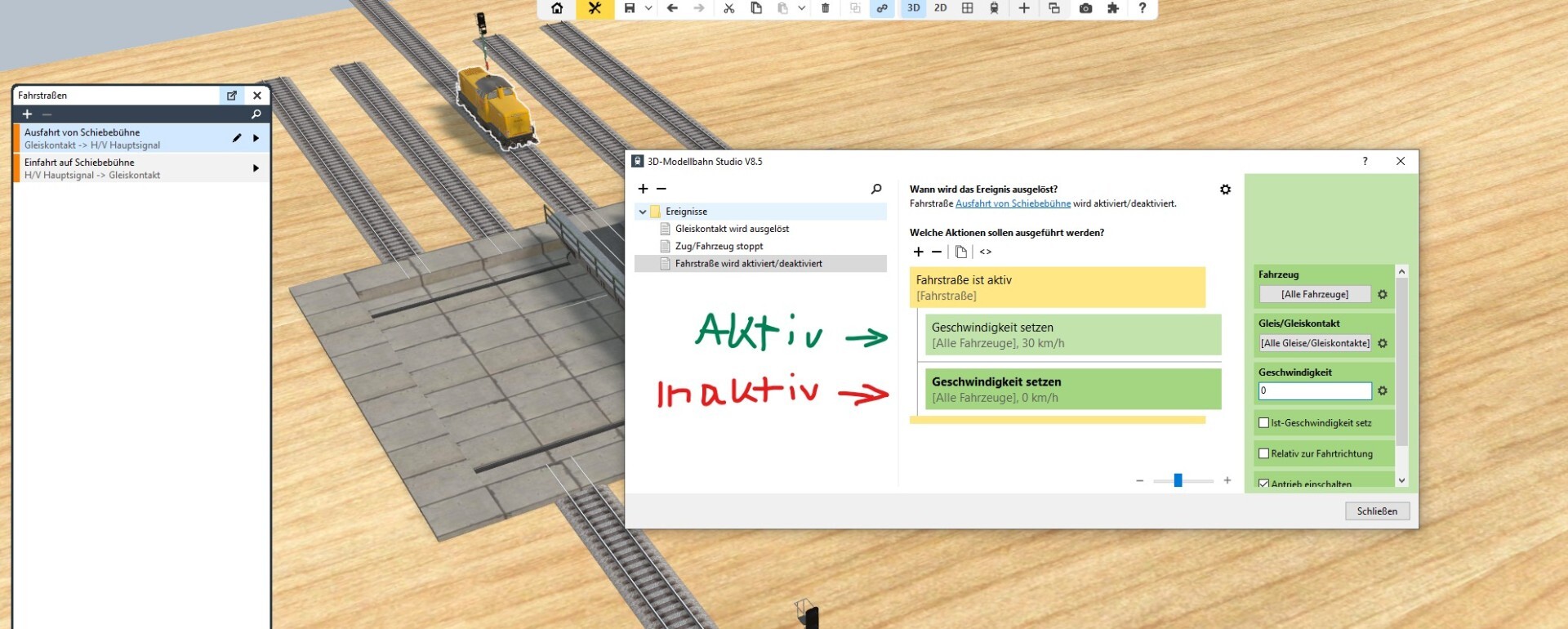
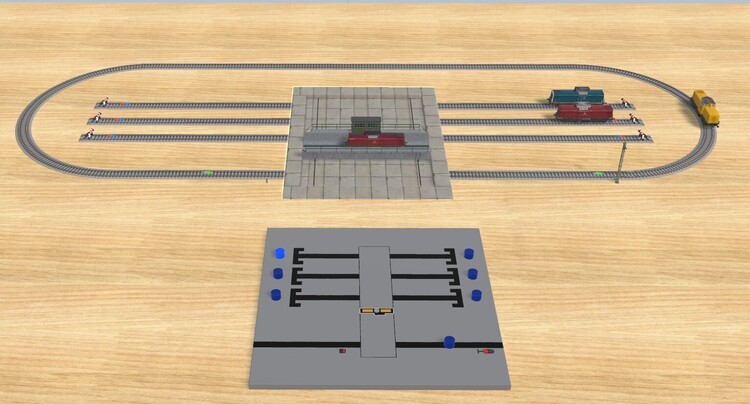
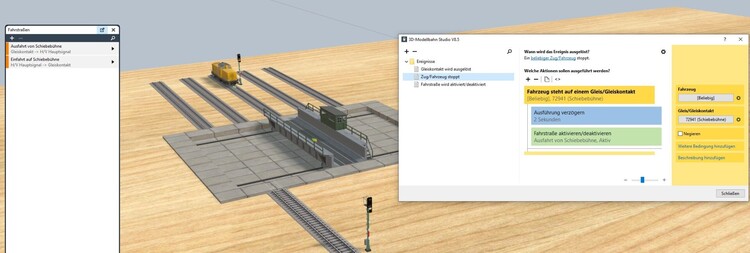
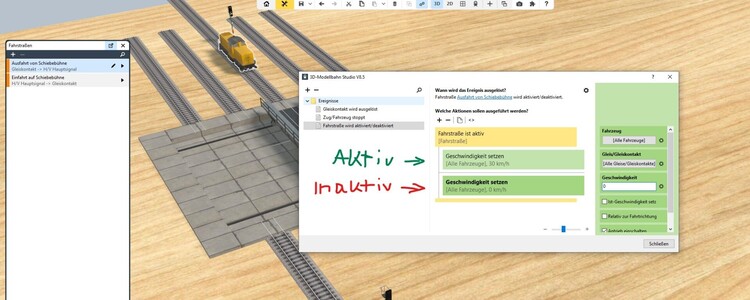
Hallo @Siejay, ich möchte dir jetzt noch keine Komplettlösung aufzeigen, da ich denke das du es dir selbst erarbeiten möchtest. Deshalb zu deinen jetzigen Problemen. Das passiert aber nur, wenn du beide Fahrstraßen direkt hintereinander aktivierst. (Die Fahrstraße "Ausfahrt" ist dann aber noch blockiert.) Die Fahrstraße "Einfahrt" wird deaktiviert, wenn die Lok den GK erreicht. Dann hat sie aber noch nicht gestoppt! Durch die Deaktivierung der Fahrstraße "Einfahrt" wird die Blockierung der Fahrstraße "Ausfahrt" aufgehoben, und die Schiebebühne fährt zur Position Ausfahrt. Und das noch bevor die Lok steht. Eine mögliche Lösung wäre die Fahrstraße "Ausfahrt" im Ereignis "Zug /Fahrzeug stoppt" zu aktivieren. Da du sicherlich mehrere Ausfahrten habe möchtest, wären Schalter sinnvoll, in denen die Fahrstraßen für die Ausfahrten dann als Variable hinterlegt sind. Zum zweiten Problem: Das liegt daran, das du der Lok immer die Geschwindigkeit "30 Kmh" zuweist, wenn die Fahrstraße "Ausfahrt" aktiviert oder deaktiviert wird. Das heißt die Lok stoppt . . . und beschleunigt sofort wieder auf 30 kmh. Deshalb ist es wichtig diese Zustände zu unterscheiden und der Lok nur dann die Geschwindigkeit zuweisen, wenn die Fahrstraße aktiv ist. (Da die Lok aber eh am Signal hält, ist die Anweisung Geschwindigkeit setzten = "0" überflüssig und soll eigentlich nur das Problem verdeutlichen. Wichtig ist die Anweisung Geschwindigkeit setzten auf "30" in der Bedingung "Fahrstraße ist aktiv" zu verwenden.) VG, Hawkeye
-
Hallo Siejay, hier wäre mal ein paar Screenshot von den Fahrstraßen und der EV oder Deine Testanlage nützlich. Man kann aus deiner Beschreibung leider nicht erkennen, was du gemacht hast. VG, Hawkeye
-
Du brauchst 2 Fahrstraßen, wenn die Schiebebühne in einer anderen Position zur Weiterfahrt stehen soll. (Und mindestens einen Gleiskontakt auf der Bühne). Eine Fahrstraße auf die Bühne und eine Fahrstraße von der Bühne runter. Dabei muß die Bühne zur Einrichtung der Fahrstraßen immer in der entsprechenden Position stehen, damit das Programm auch eine Fahrstraße zwischen den Gleiskontakten „findet“. VG, Hawkeye
-
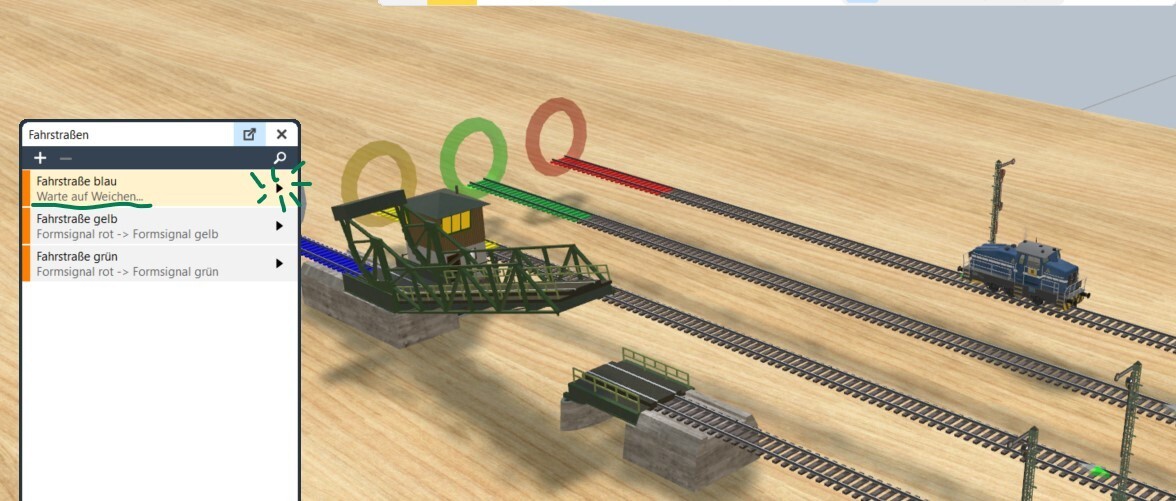
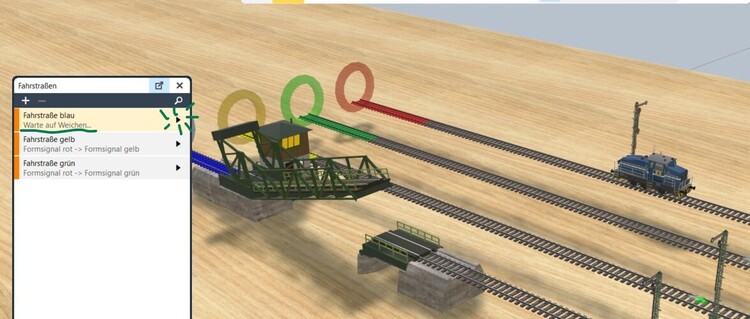
Hallo @EASY, was ich auch noch nicht gewusst habe ist, dass der Zustand = 2 (Warten) sogar eindeutig im Fahrstraßenfenster angezeigt wird. Der Pfeil blinkt während der Wartezeit und es erscheint die Meldung " Warte auf Weichen ...". Man nimmt es aber nur bewusst war, wenn die Animationszeit entsprechend lang ist, wie z.B. bei der Klappbrücke von . . . . . @EASY Ein frohes neues Jahr wünscht, Hawkeye
-
Hallo @EASY, die Beschreibung dieses Zustandes ist etwas unglücklich formuliert. Mit „Weichen“ sind hier z.B. Drehbrücken oder Drehscheiben gemeint, die bei Aktivierung einer Fahrstraße erst einige Zeit benötigen, um die richtige Position für die Herstellung der Fahrstraße zu erreichen.Kommt also äußerst selten vor. VG, Hawkeye
-
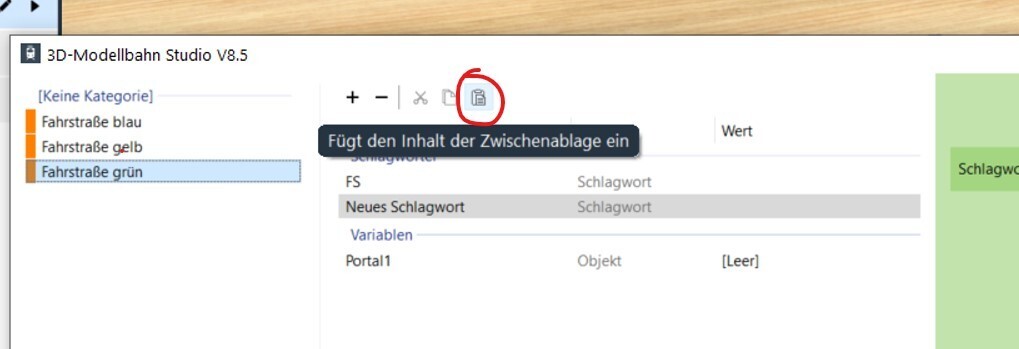
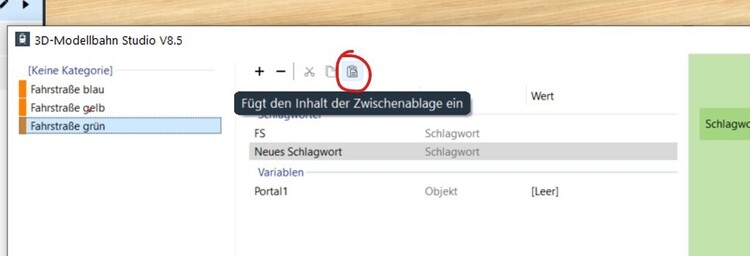
Hallo Easy, ein neue Schlagwort bei einer Fahrstraße erstellen, und dieses Schlagwort (aber nicht nur den Namen des Schlagwortes!) mit <Strg>+"c" in die Zwischenablage kopieren. Danach nur noch die anderen Fahrstraßen der Reihe nach auswählen und mit "Fügt den Inhalt der Zwischenablage ein" wird das neue Schlagwort vergeben. Sind nur 2 Klicks pro Fahrstraße -> 1. Fahrstraße auswählen und 2. Einfügen ... . Geht rasant schnell. VG, Hawkeye
-
🤔 Und wo ist das Problem allen Fahrstraßen ein Schlagwort zu verpassen. Von wieviel zigtausend Fahrstraßen gehst du den aus. Selbst bei 100 Fahrstraßen ist es kein allzu großer Aufwand mit Copy/Paste allen Fahrstraßen dasselbe Schlagwort zu geben. VG, Hawkeye
-
Hallo @Phrontistes, das Problem kann man aber leicht umgehen, indem man prüft, ob auf der Strecke der Fahrstraße Portale vorhanden sind und diese mit Aktivierung der Fahrstraße dann automatisch verbunden werden. Portal zufällig auswählen mit Fahrstraßen.mbp VG, Hawkeye
-
Hallo, da mach ich auch mal mit. Hier ein kleines einfaches Beispiel für eine zufällige Auswahl eines Portals. Geht auch ohne Lua. Portal zufällig auswählen.mbp VG, Hawkeye

-
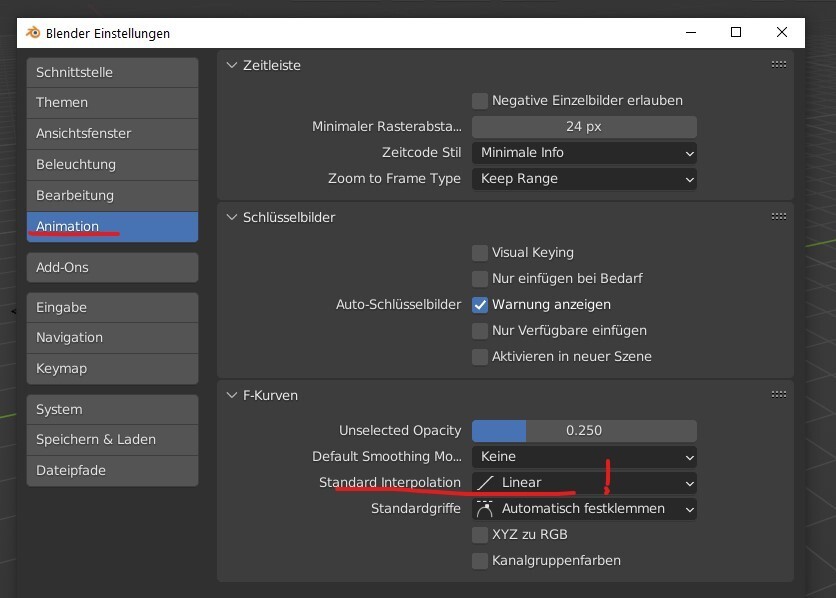
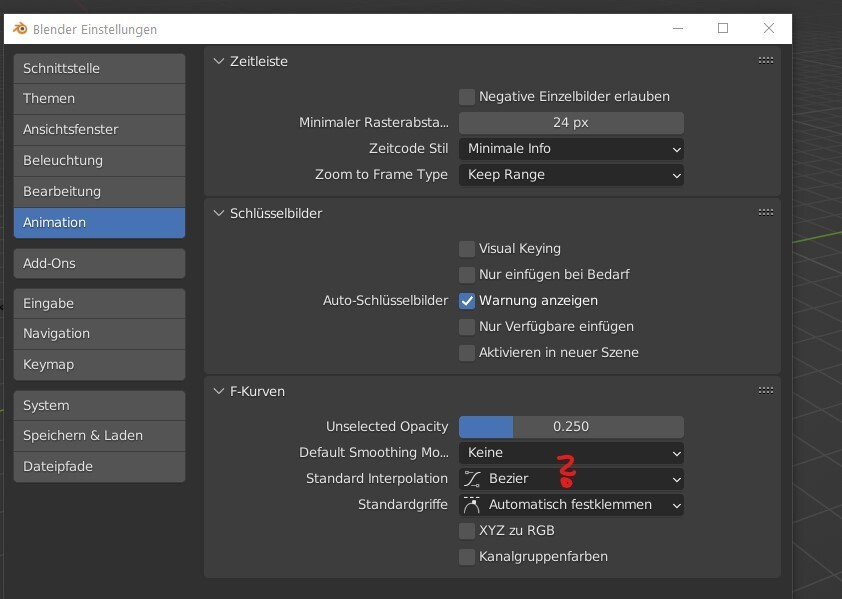
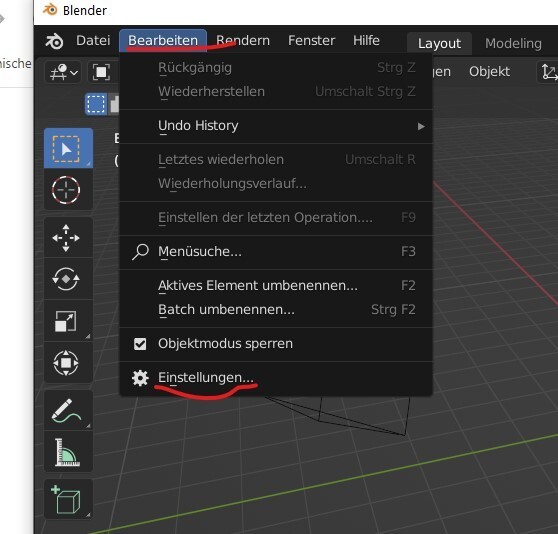
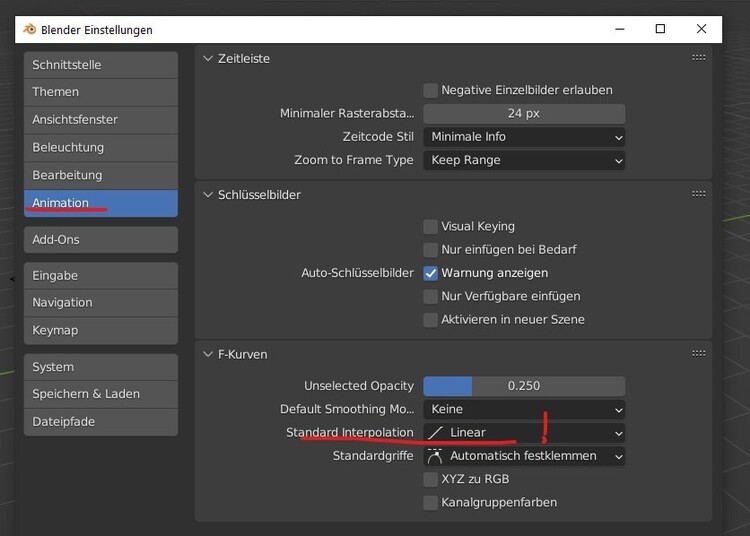
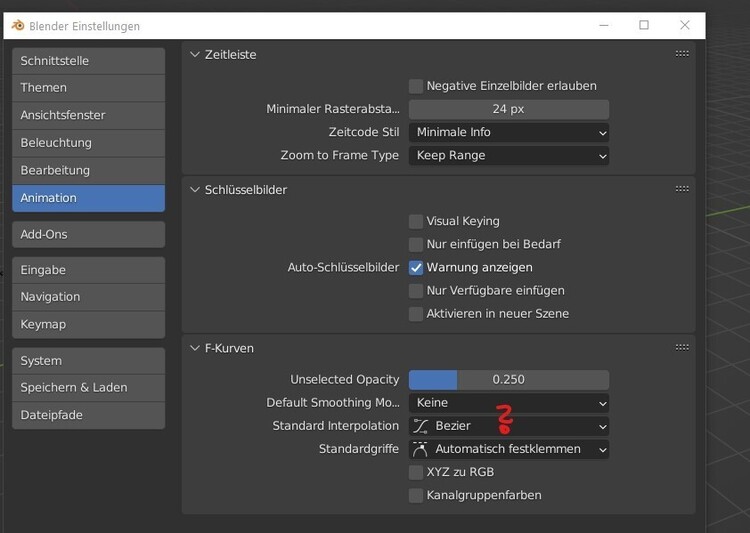
Google-Übesetzung: Modell eines Mühlentyps aus Kastilien-La Mancha. Einer von dem, was ich für die Riesen von Don Quijote hielt. Ich habe die Schwerter animiert. Aber wenn ich sie in das Programm lade, beschleunigt es mich und wenn es das Ende erreicht, verlangsamt es mich. Gibt es eine Möglichkeit, entweder in Blender oder in der Anim-Datei, die „Schleife“ glatt zu machen? Hallo @David Teide Überprüfe deine Blender Einstellungen für Animationen. Steht bei dir unter "Standard Interpolation ="Bezier" ? Versuche es mit der Einstellung: "Linear" Du wirst aber deine Animationsdaten nach dieser Änderung neu erstellen müssen. VG, Hawkeye
-
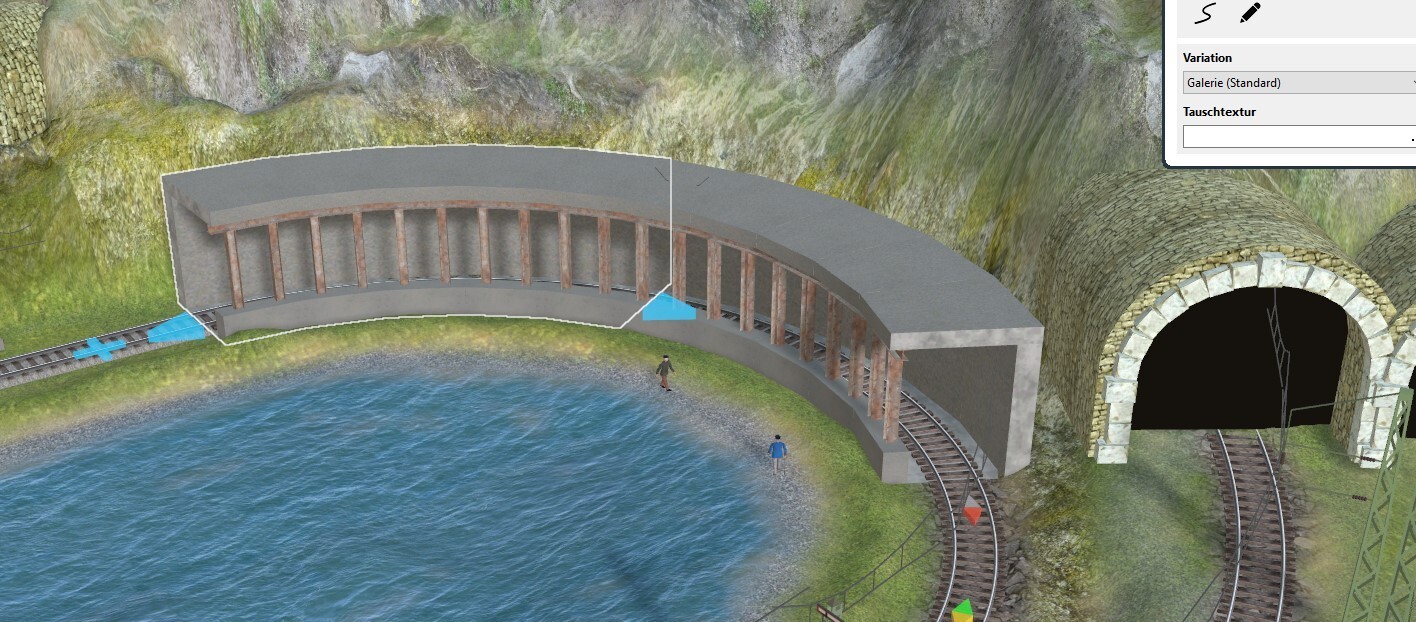
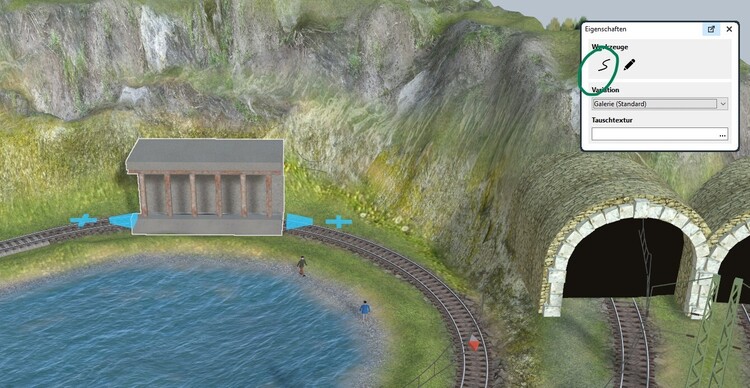
Hallo Markus, ich habe den Eindruck, das dir die Funktion "Pfad folgen" bei Spline-Objekten noch fremd ist. Diese Objekte lassen sich ganz einfach entlang von anderen Spline-Objekten wie den Schienen, (oder Straßen, etc. ) entlang bauen. Das Objekt auswählen, dann unter Eigenschaften die Funktion "Pfad folgen" anklicken und dann nacheinander alle Gleise, denen das Objekt angepasst werden soll. Hier ein Beispiel auf deiner Anlage. Mit dem Fahrdraht der Oberleitung geht das auch. VG, Hawkeye


-
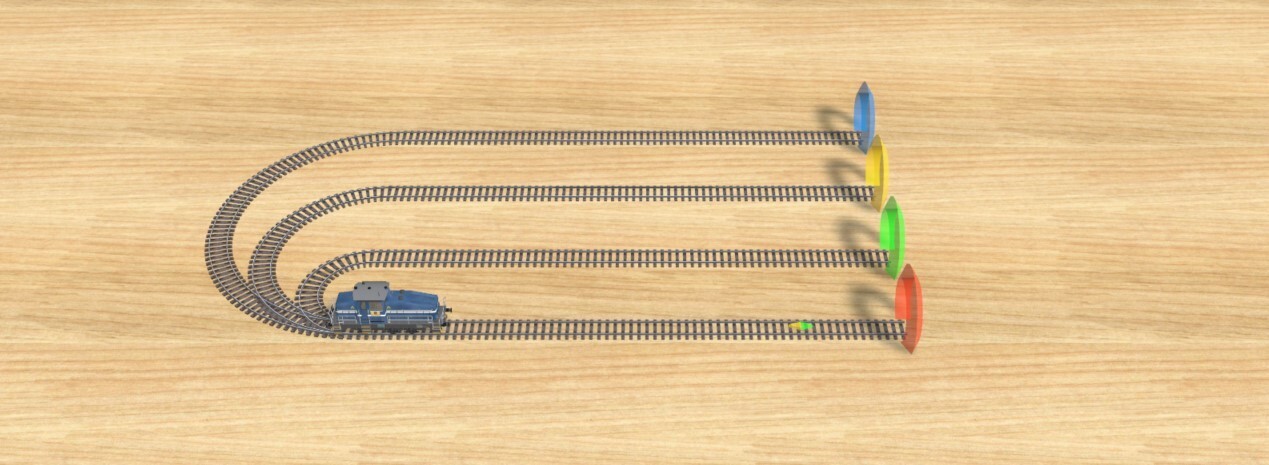
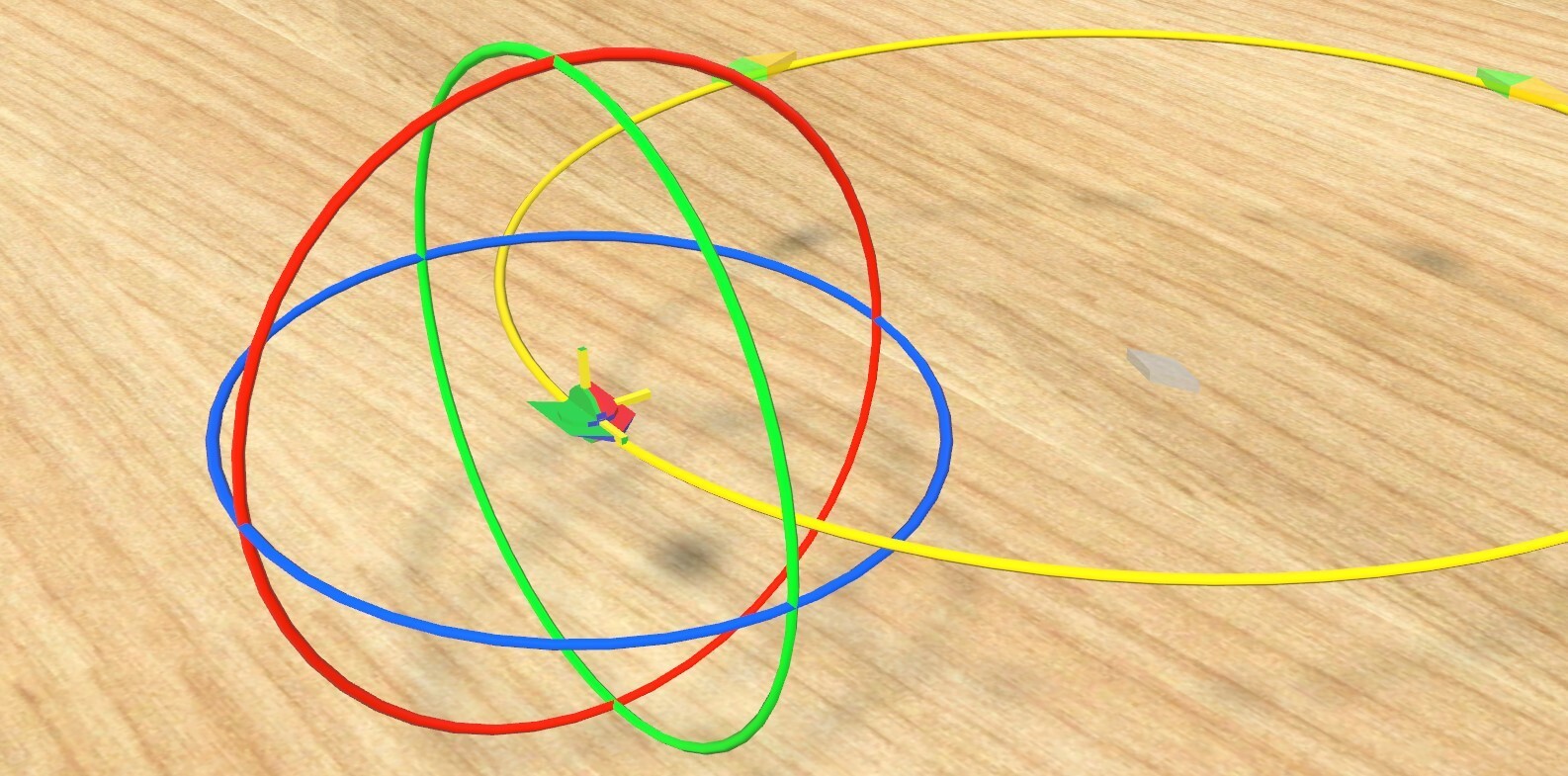
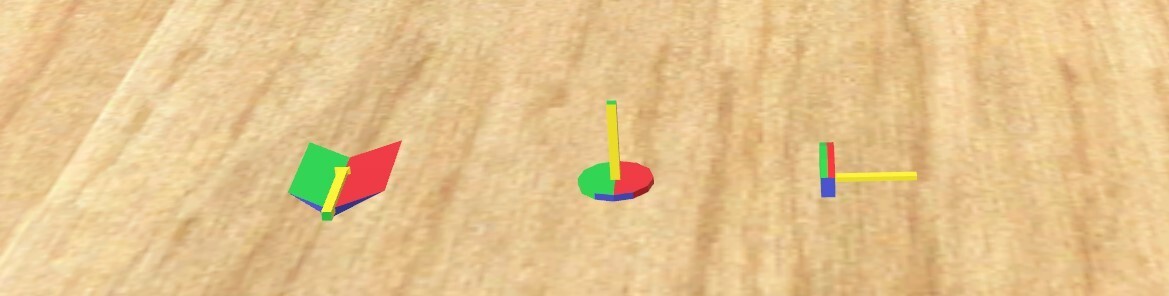
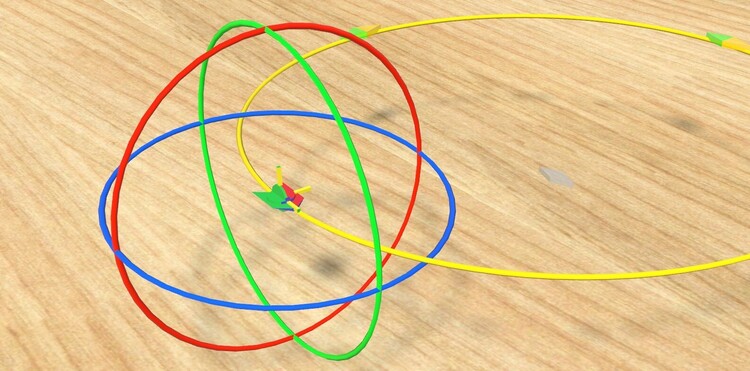
Hallo Eggu, nein, keine Loks und keine Spuren auf denen Loks fahren (zumindest nicht für die Rotationsbewegungen). Ich experimentiere gerade mit eigenen Dummys, die die Rotationsbewegungen unabhängig voneinander um die X-, Y- und Z-Achsen per Animation ausführen. Dieses Gebilde in der Mitte bestehen aus 4 verschiedenen Dummys. 1. von links Dummy "Rollen" (um X mit Antrieb), 2.tes von links Dummy "Gieren (um Z)", 2.tes von rechts Dummy "Nicken (um Y)", ganz rechts ist das "Source"-Objekt als Drehachse ausgebildet. Verknüpfte Katalog-Objekte mit diesem Source-Objekt lassen sich dann um die jeweiligen Achsen drehen. Hier als Beispiel jeweils die einzelnen Kombinationen mit nur einer Drehachse. von links nach rechts: Rollen (Rotation um die X-Achse), Gieren (um Z), Nicken (um Y) Per Kontaktpunkten (_CP_Source und _CP_Target) zusammengebaut, sieht das Ganze dann so aus. Sieht etwas bunt aus, hat aber den Sinn, das man erkennt, ob das ganze auch richtig zusammengebaut ist. Und das Basis-Dummy "Rollen" hat auch einen eigenen Antrieb. Deshalb auch die Farben grün für "Steuerbord" und rot für "Backbord" in Fahrtrichtung "vorwärts". Mit der richtigen Achse (gelb) verknüpfte Objekte, lassen diese sich somit um alle drei Achsen um 360° unabhängig von einander in jede beliebige Position drehen. Ist noch in der Testphase. Deshalb wollte ich ja auch gleich die Eigenschaft "im Simulationsmodus unsichtbar" mit verwenden. Geht aber nicht. VG, Hawkeye



-
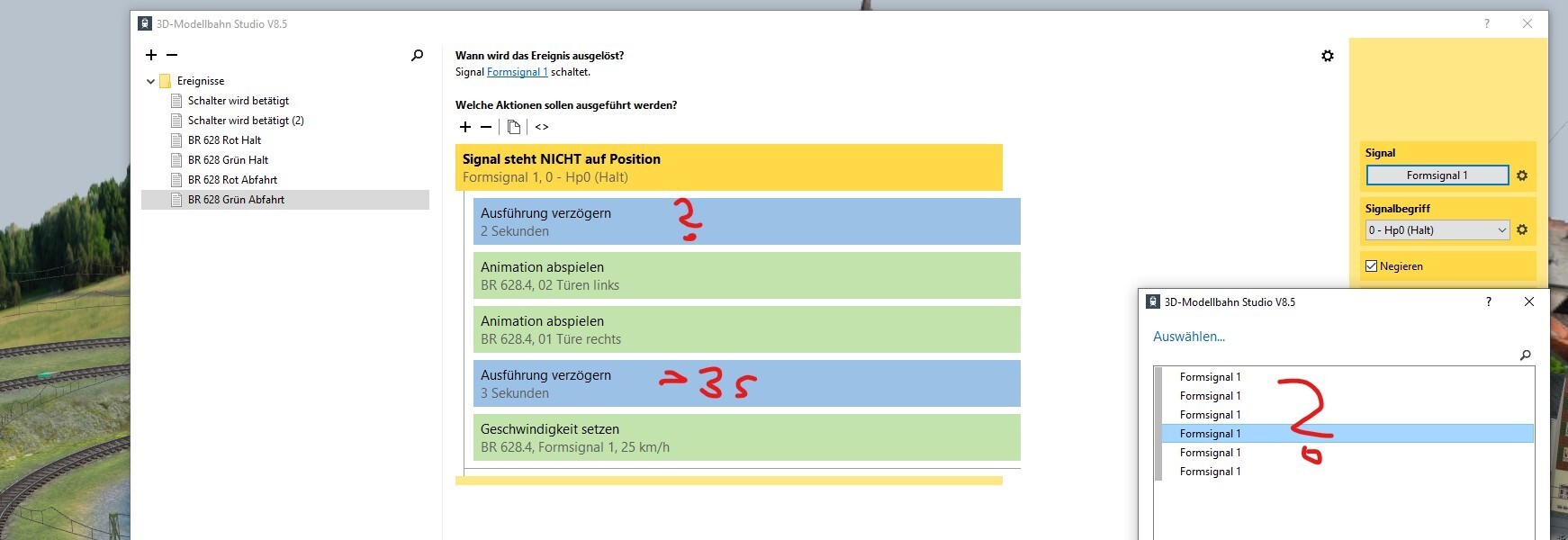
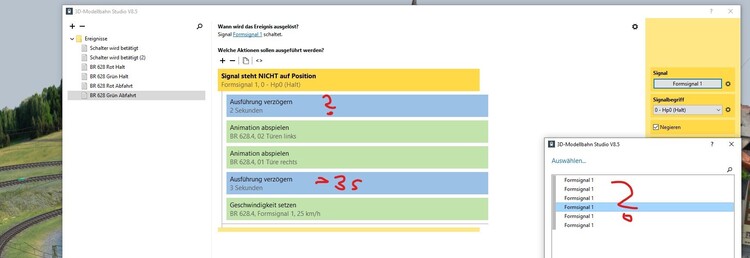
Na dann programmiere das doch auch so. Türen schließen dauert ca. 3 s, in der Zeit läuft die EV aber weiter! (Hat @Goetz aber oben auch schon geschrieben.) => 3s (für Türen) + 3 s (Warten) = 6s VG, Hawkeye
-
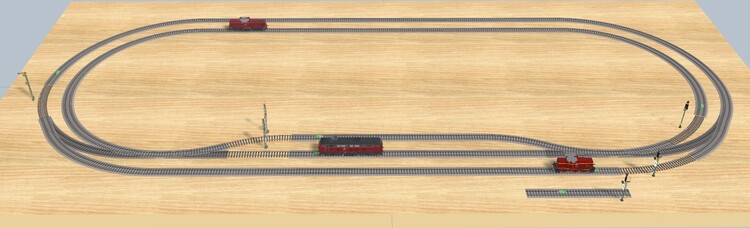
Hallo Markus, habe ich auch mal gemacht. Da was du programmiert hast wird, wie Götz schon festgestellt hat, auch genauso von der EV umgesetzt. Die Ursache warum die EV es nicht so ausführt wie du es dir vorstellst, liegt an deinen Signaleinstellungen. Du möchtest die Anfahrgeschwindigkeit und den Zeitpunkt des Losfahrens über die EV steuern. Dann müssen die Voreinstellungen am Gleiskontakt der Signale aber auch ausgeschaltet sein. Im Signal für die "rote" Lok ist bei 1-HP1 das Kästchen für "Beschleunigen auf" aus. -> ok. Im Signal für die "grüne" Lok ist bei 1-HP1 das das Kästchen für "Beschleunigen auf" aktiv. -> Der Zug fährt also sofort los und beschleunigt auf 80kmh. Dann spielt es keine Rolle mehr welche Verzögerungen oder Geschwindigkeiten du per EV einstellst. Die Türen schließen also nachdem der Zug losgefahren ist. DEINE VORGABE! Meinst du nicht es wäre auch besser, gleiche Objekte zu besseren Identifizierung mit verschiedenen Namen zu versehen. Bei großen Anlagen kommst du sonst ins Schwitzen. Du stellst dir aber auch immer selbst ein Bein. VG, Hawkeye


-
Hallo Zusammen, hier mal ein kleines Experiment mit fahrenden und gleichzeitigt rotierenden Objekten. (Die Dummys sind ausgeblendet.) VG, Hawkeye
-
🤔 Danke, ist natürlich auch eine Alternative. Da kann ich dann ja auch lang suchen. 😂 VG, Hawkeye
-
Ich habe mir zum Testen ein paar Dummy‘s gebaut, die es ermöglichen Objekte per Verknüpfung mit den Dummy’s auf einer Spur fahren zu lassen und diese Objekte dabei auch in mehreren Achsen gleichzeitig zu rotieren zulassen. Um das für alle Achsen (x,y,z) auch gleichzeitig zu realisieren, benötige ich 4 verschiedene Dummy‘s. Es ist lästig, diese Objekte alle im Simulationsmodus immer „von Hand“ ausschalten zu müssen. VG, Hawkeye
-
Hallo @Neo, wie erstellt man ein Modell mit der Eigenschaft „im Simulationsmodus unsichtbar“ ? Wie bei den Gleiskontakten oder dem Kontaktpunkt von @Franz. In der WIKI finde ich nichts dazu und beim Hinzufügen (+ Neu) eines in Blender erstellten eigenen Modells wird auch nichts angeboten. VG, Hawkeye