Hawkeye
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Hawkeye
-
Hallo @Anlagendesigner, schön wäre ein Bild, wie das aussehen soll. Woran soll man sich sonst orientieren? Meinst du sowas? VG, Hawkeye

-
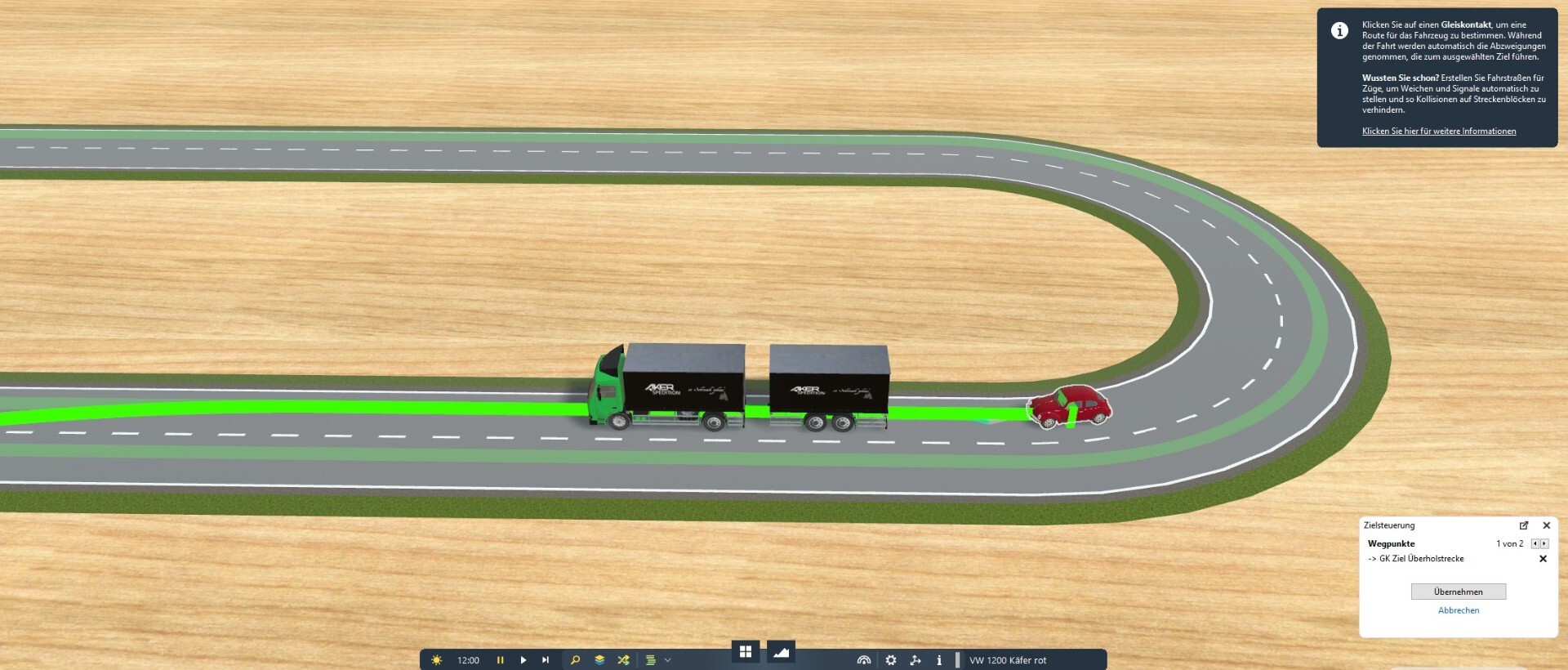
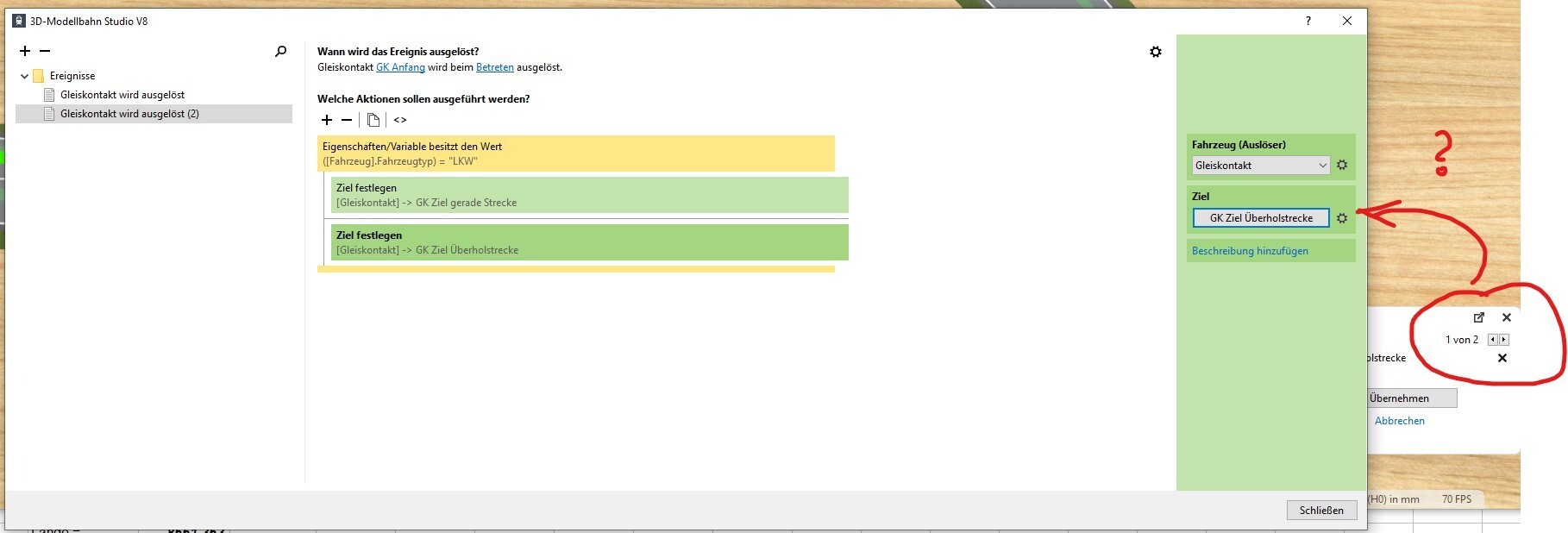
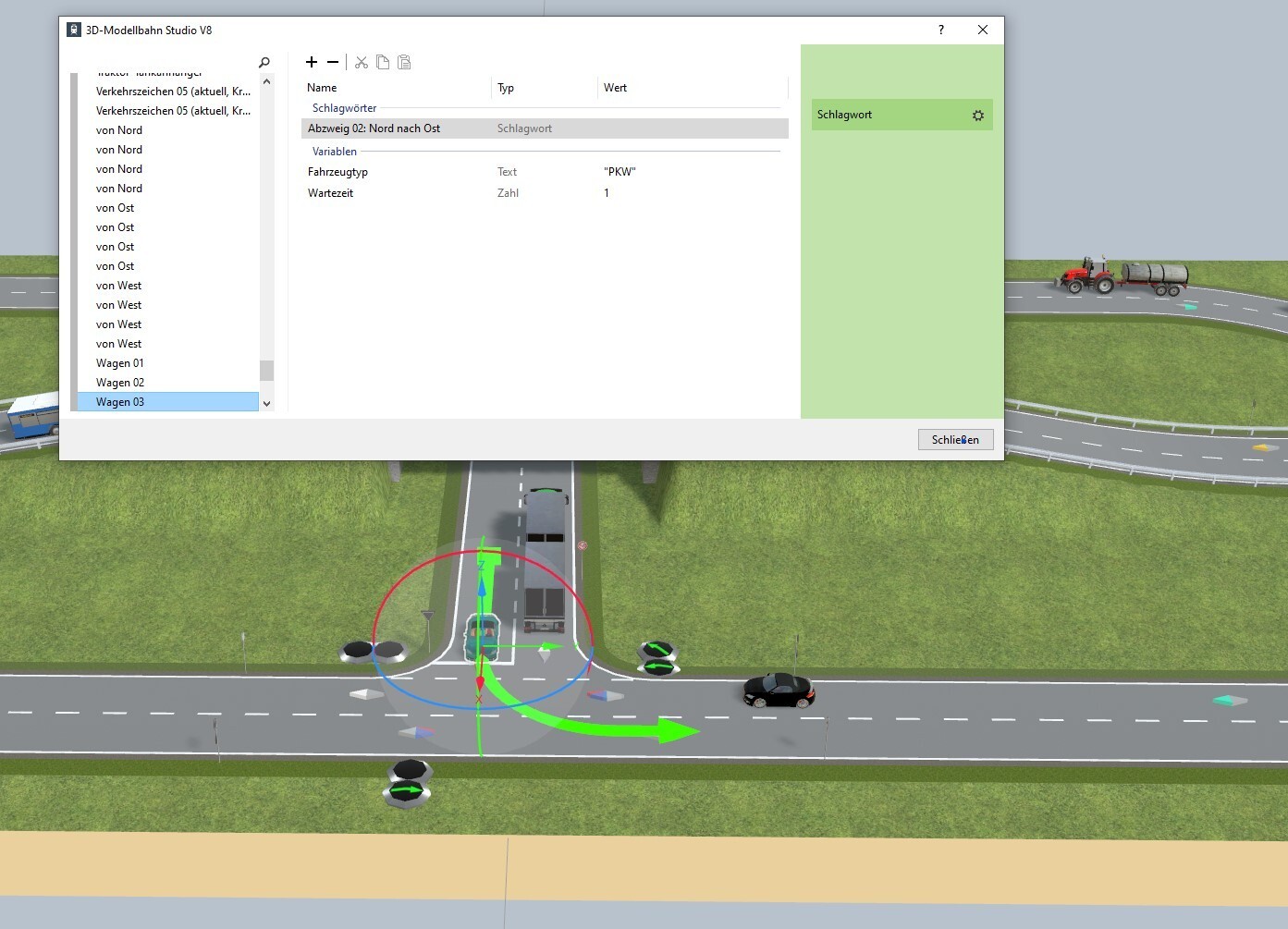
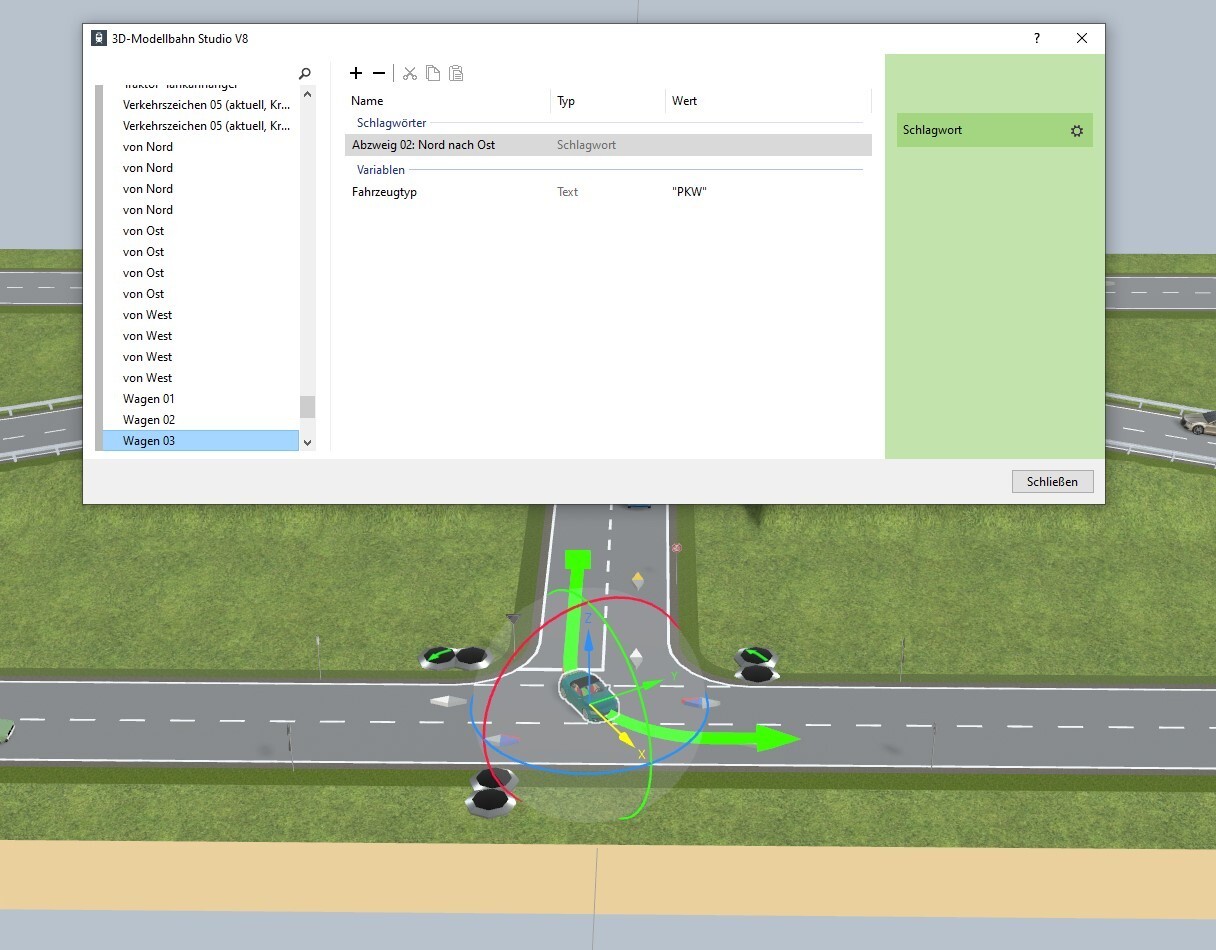
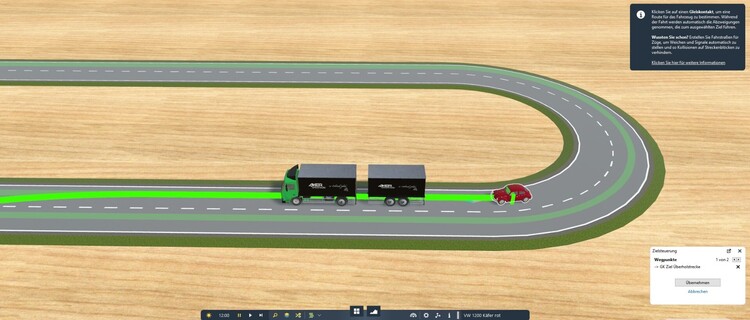
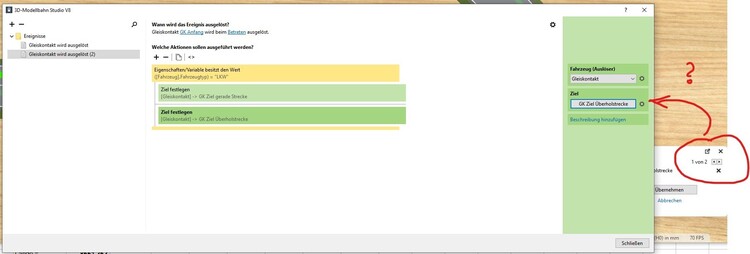
Hallo @Neo, wenn ich einem Fahrzeug ein Ziel manuell zuweise, werden mir alle Fahrwege angezeigt, die möglich sind. In diesem Beispiel sind es zwei. Über die grafische EV habe ich nicht die Wahl zwischen den zwei Strecken. Leider wird hier automatisch der "falsche" Fahrweg (2 statt 1) genommen. Gibt es eine Möglichkeit in Lua die verschiedenen Wege auseinander zu halten, um dann auch den gewünschten Fahrweg auszuwählen? VG, Hawkeye
-
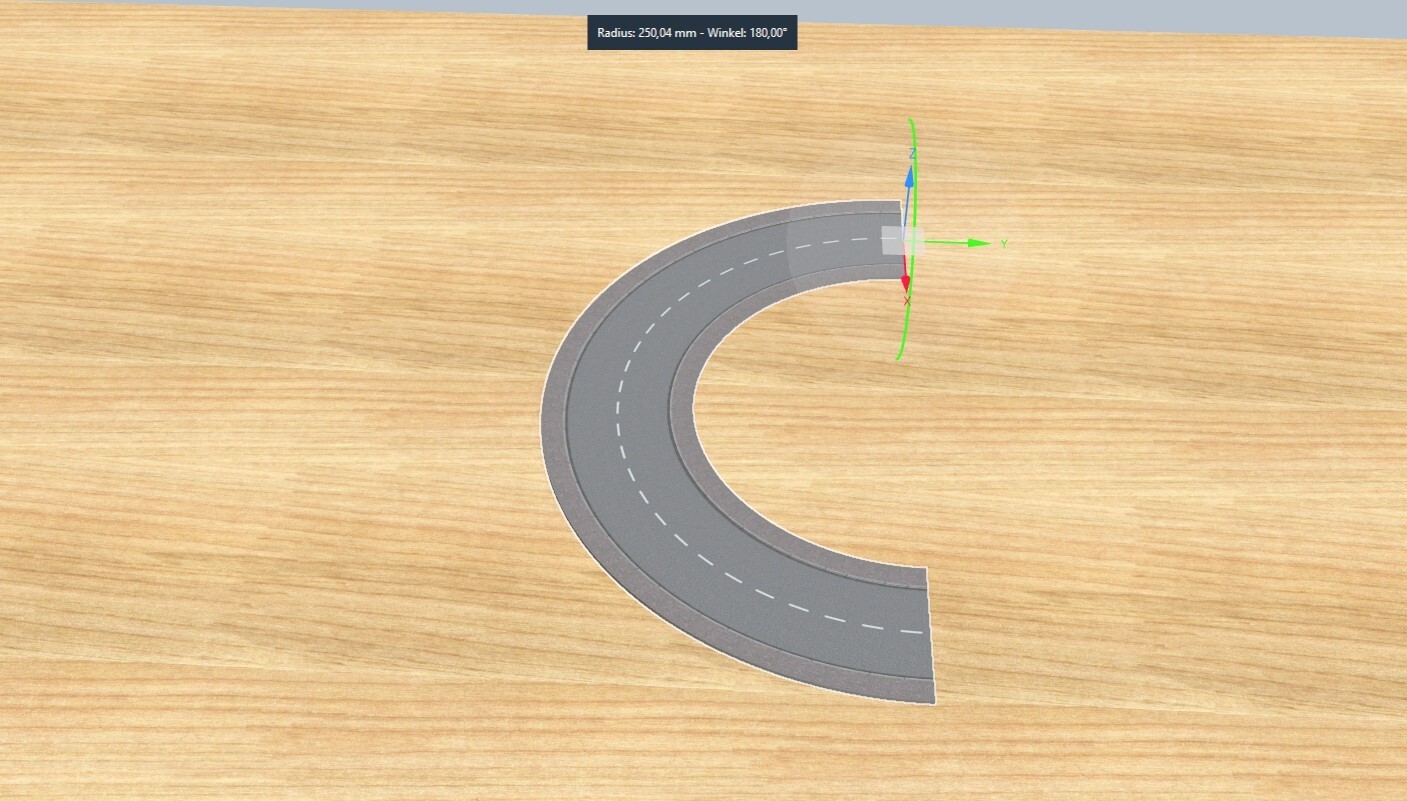
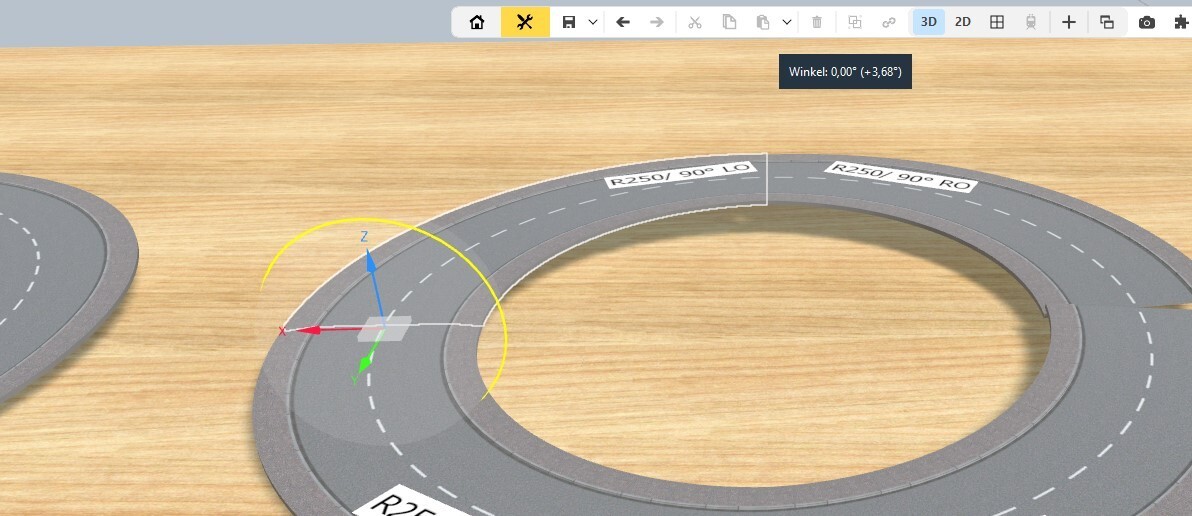
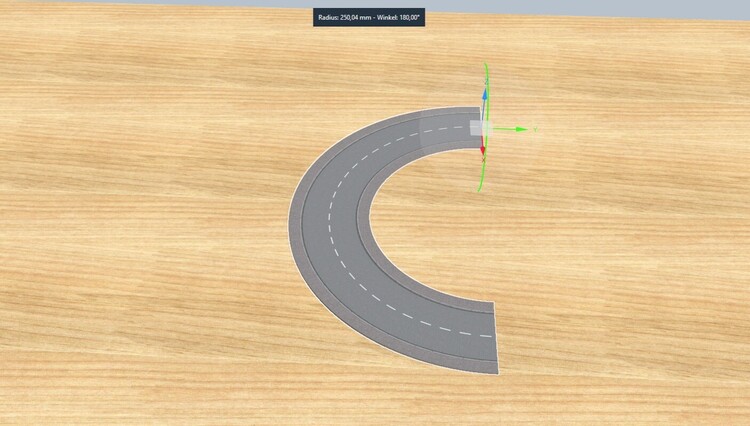
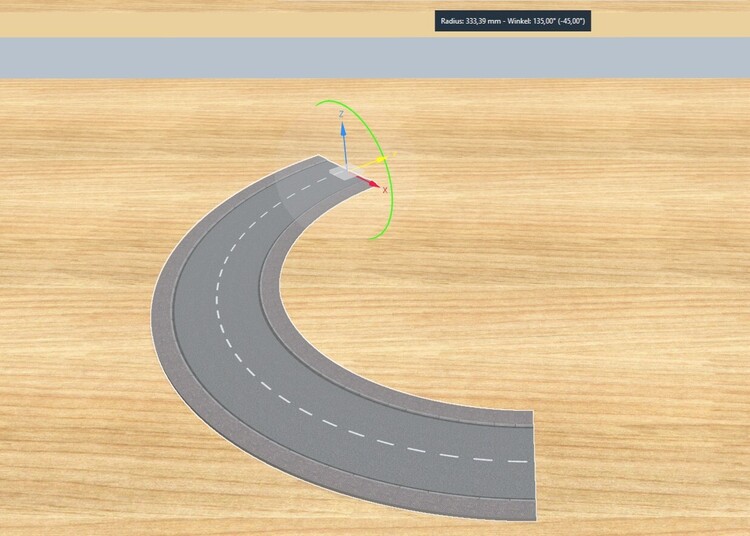
Hallo @Neo, durch diese Experimente, habe ich mal wieder einen kleinen Vorschlag zur Verbesserung. Wenn man aus einer Geraden mit dem "X"-Pfeil des Gismo am Ende eines Gleis-/Straßenstückes eine Kurve erzeugt, oder einen Kurvenradius mit dem "Y"-Pfeil verändert, dann rastet diese Kurve bei 45°, 90°,135° und 180° immer ein. Das ist sehr hilfreich, aber aus meiner Sicht leider nicht ganz ausreichend. Ist es möglich dieses "Einrasten" generell auf eine 15° Veränderung zu erweitern? 15°, 30°, 45°, 60°, 75°, 90°, etc. . . . . Dadurch würden sich noch viel mehr einfache Kombinationsmöglichkeiten bei der Erstellung von Kurven/ Gegenkurven allgemein und auch für entsprechende Kurven mit Steigungen ergeben. VG, Hawkeye
-
Sehr schön formuliert. 👍 Das trifft auch auf andere Bereiche zu. Experimentieren schafft Lösungen und lotet die Grenzen aus. Nur so lernt man dazu. VG, Hawkeye
-
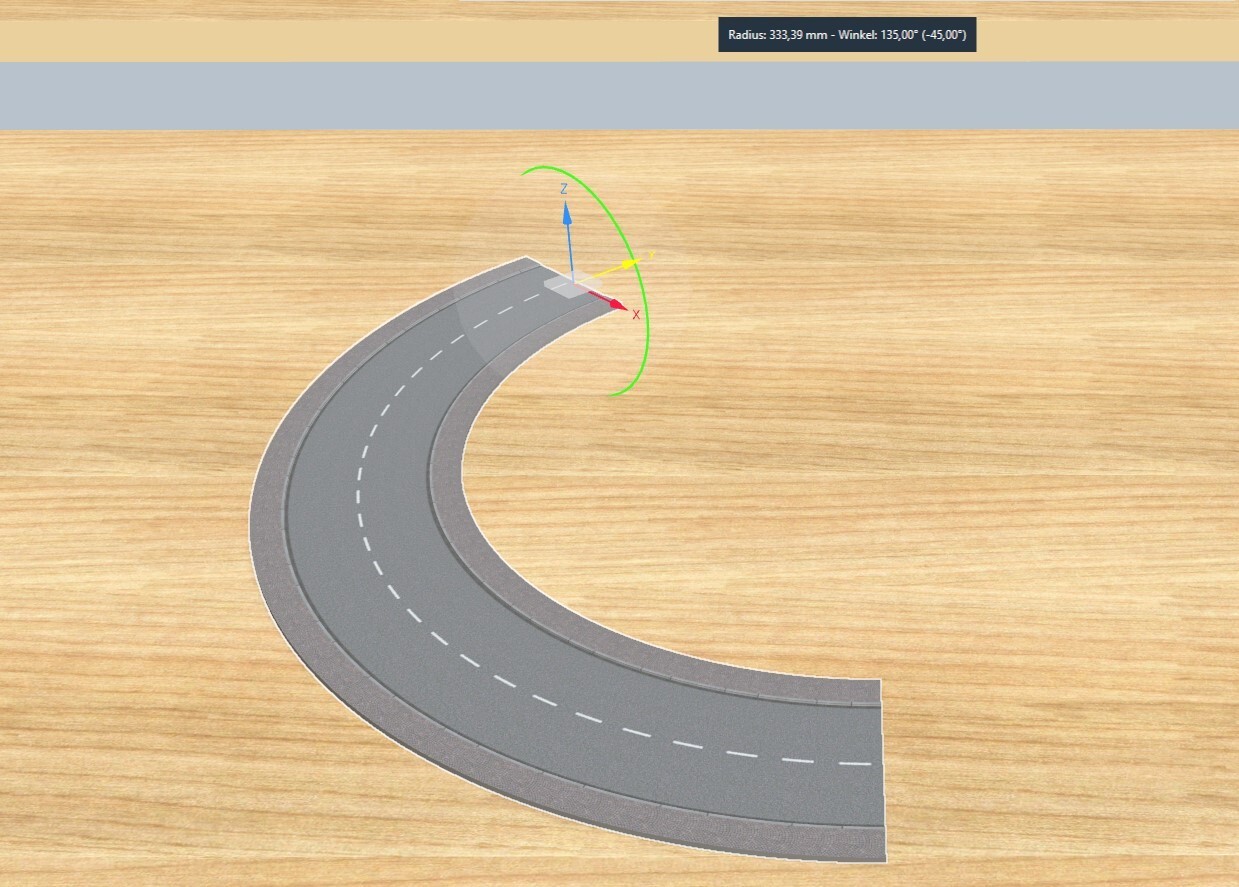
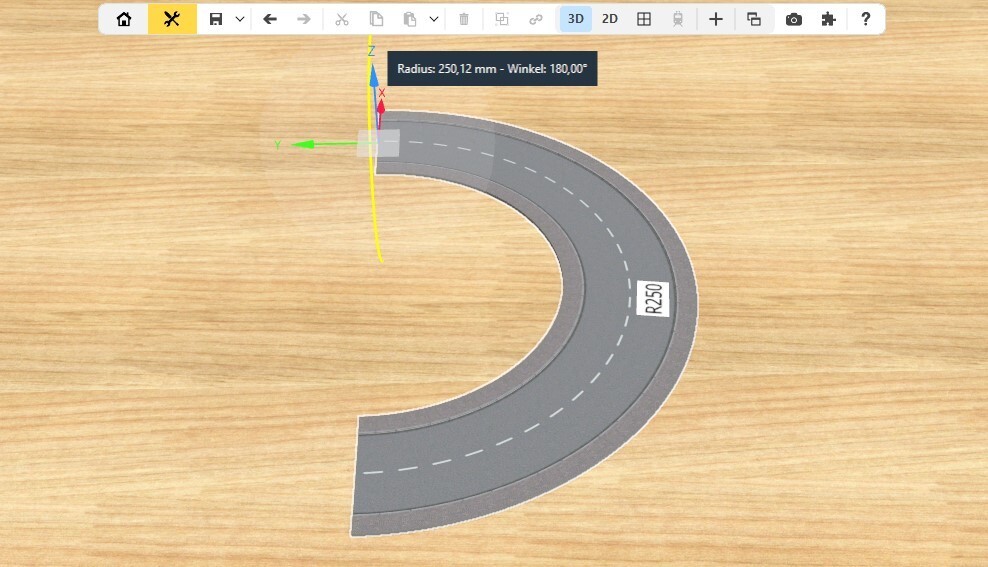
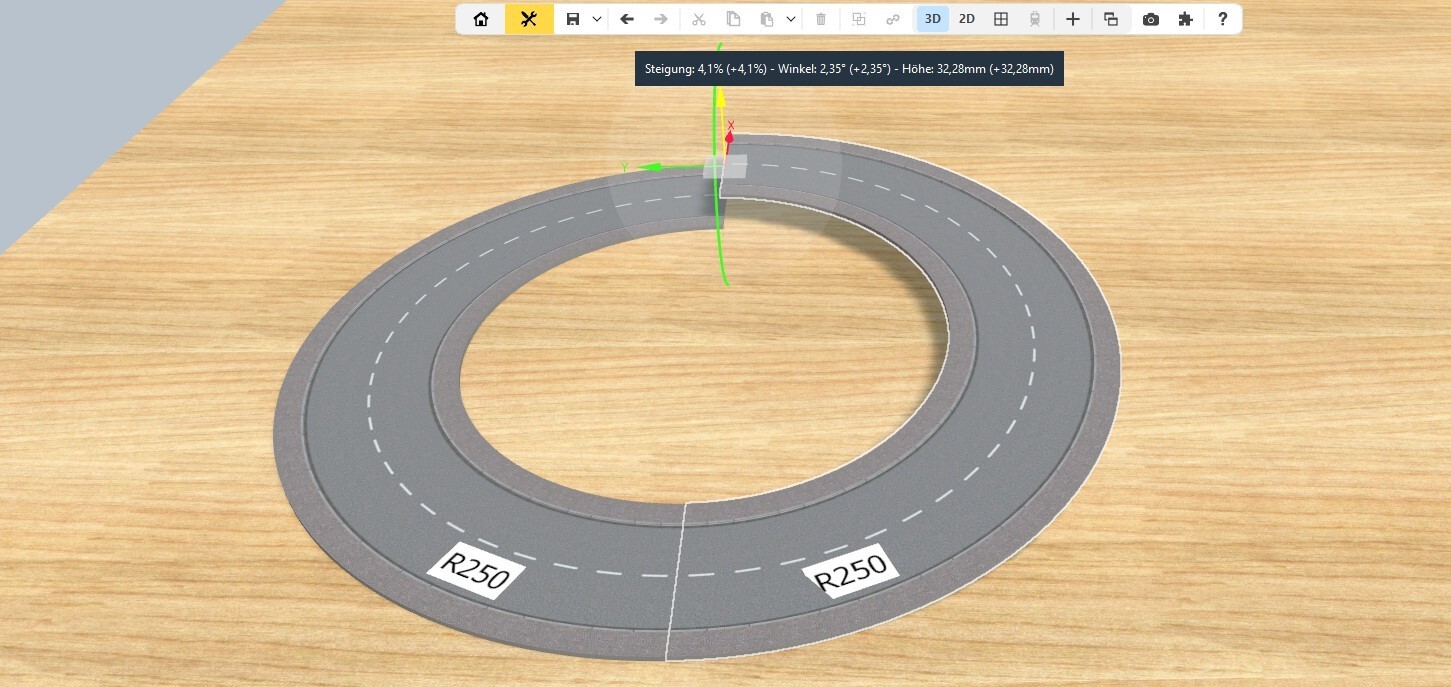
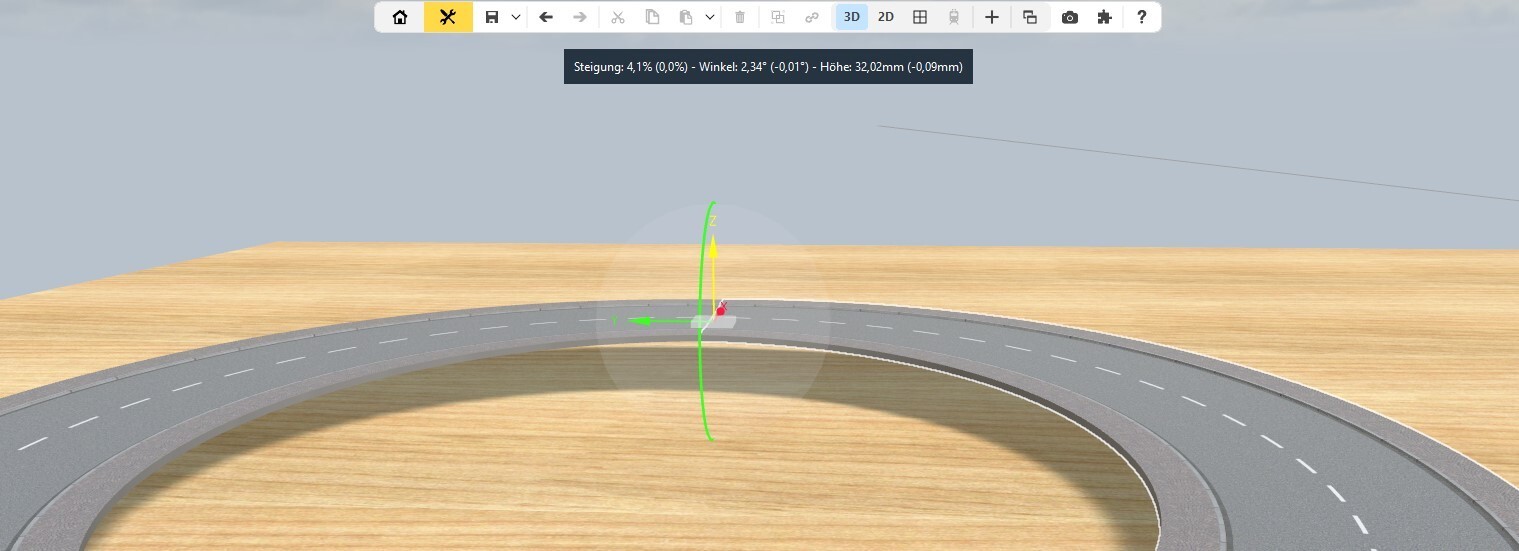
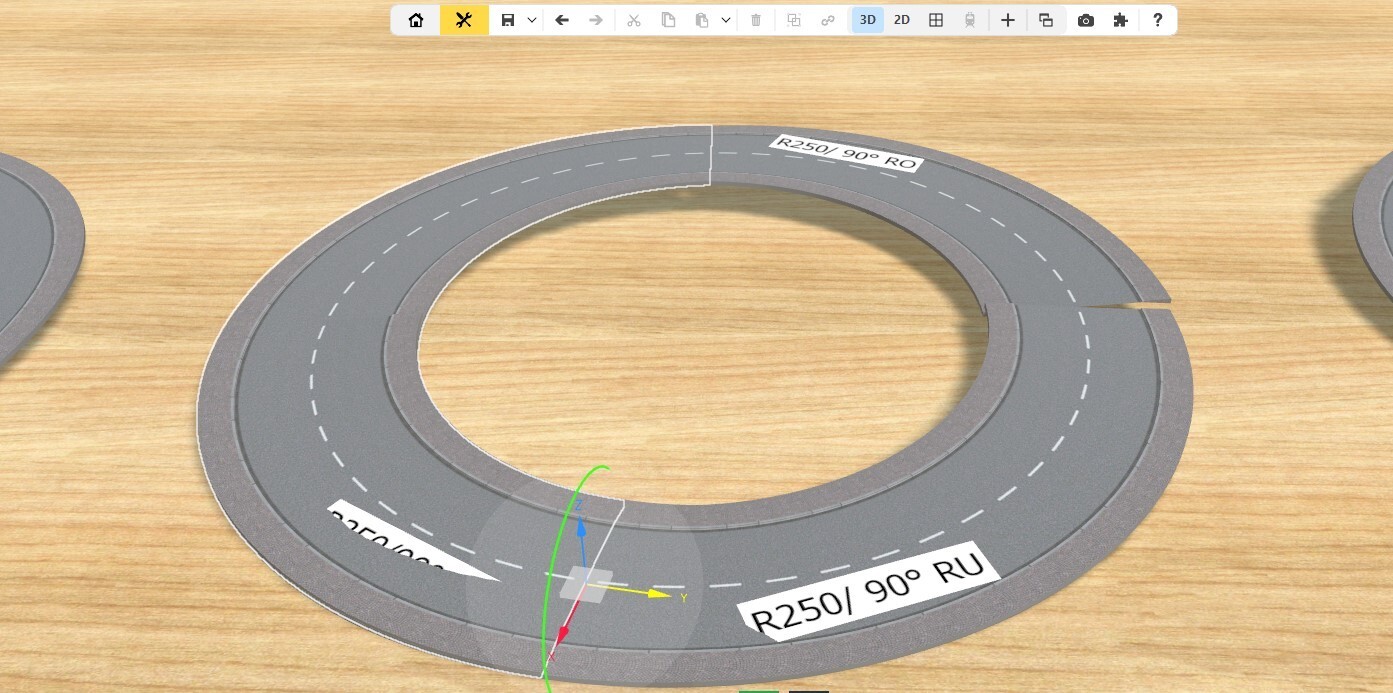
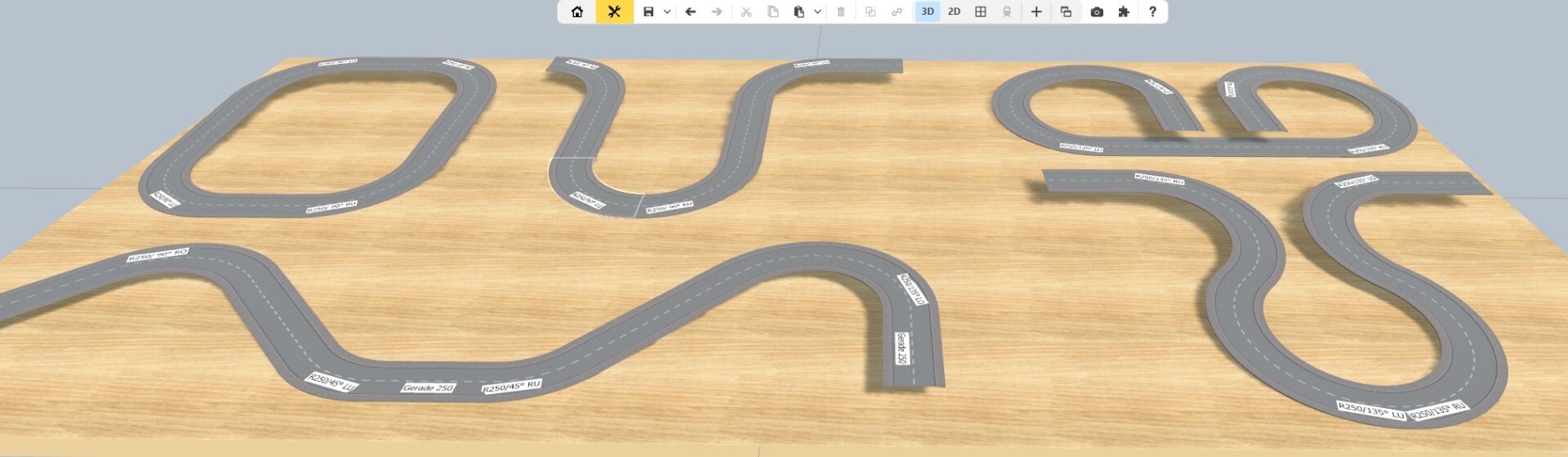
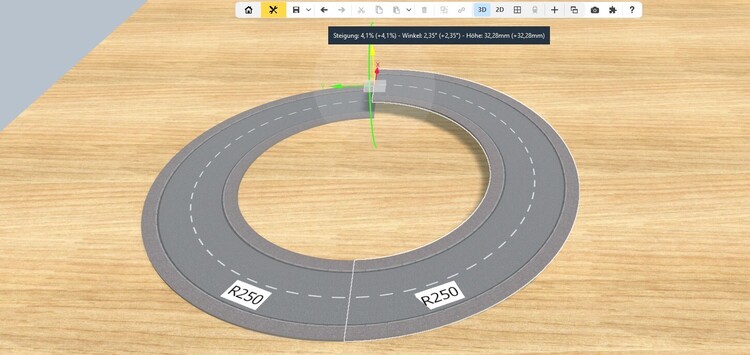
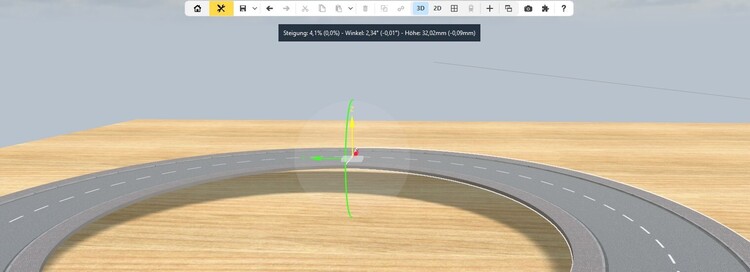
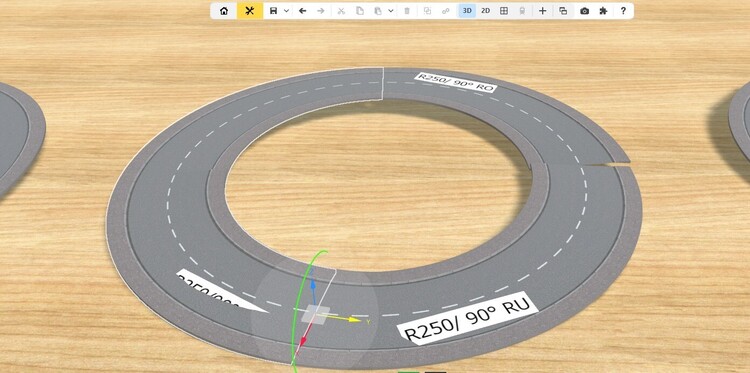
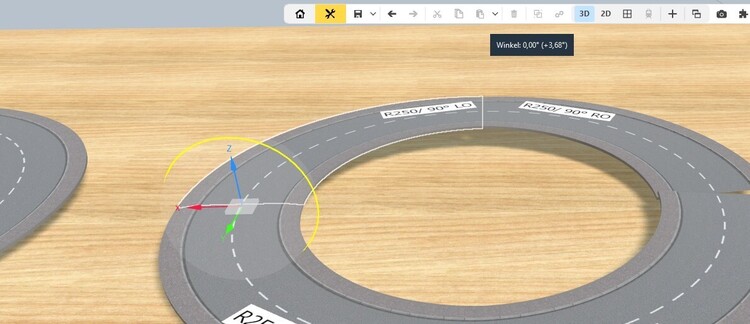
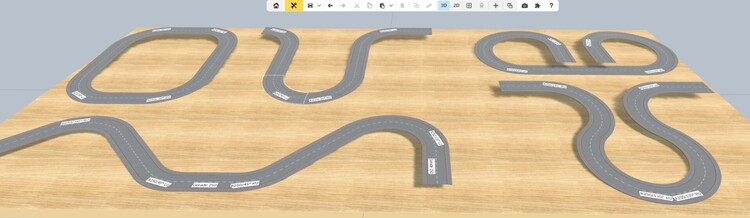
Hallo @Klartexter, und an alle, die sich dafür interessieren. Ich habe damit mal etwas weiter experimentiert. Man kann damit auch Steigungen in Kurven mit Radien von 45°, 90°, und 135° erzeugen. Hier mal ein Beispiel. Vorgehensweise: Halbkreis erzeugen mit "+" am Gleisende den Kreis schließen und den ersten Halbkreis anheben. Den 2ten Halbkreis auf die gleiche Höhe ziehen. In dieser Position beide "duplizieren". Und die Teile mit dem "Y-Pfeil" an den Gleisenden jeweils auf 90° zurückziehen. Dadurch erhälts du 4 Stücke á 90°, die jetzt den Kreis bilden. Die Unterteile Rechts und Links und die Oberteile Rechts und Links. Jetzt noch ganz wichtig! Die Verdrehung an den Kontaktstellen der "Ober" und "Unterteile" auf "0" stellen. Das geht sehr gut, da die Verwindungen bei "0" einrasten. Das gleiche Spiel kann man mit 45° und 135° machen. Diese verschiedenen Ober- und Unterteile lassen sich dann auch beliebig kombinieren, so das ein gerades Stück ohne Verdrehung anschließen kann. Welche Höhe man damit erzeugt, bzw. erzeugen will muss man einfach ausprobieren. Die Geraden im Beispiel oben links werden z.B. dadurch erzeugt, indem man die Unterteile durch "+" anfügt, mit dem "x"-Pfeil wieder in eine Gerade zurückzieht und danach (Wichtig!) auch am oberen Ende die Verdrehung rückgängig macht. Dadurch bleibt der Steigungswinkel erhalten. Hier mal das Beispiel als Datei. Beispiel Steigung in Kurven ohne Knick.mbp VG, Hawkeye
-
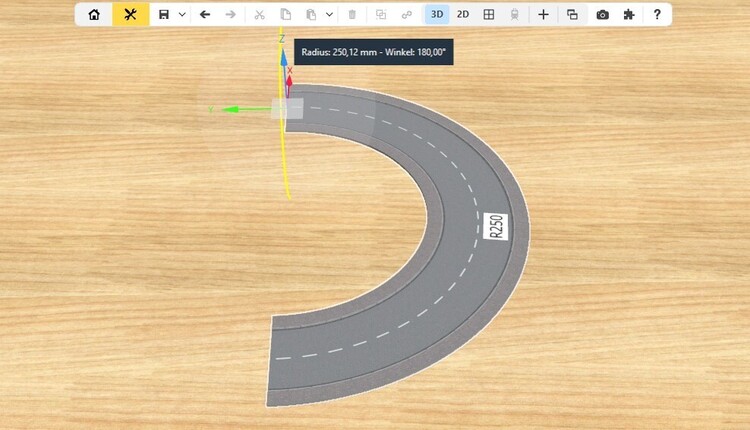
Hallo Walter, Das hatte ich hier mal beschrieben. Ziehe eine Straße deiner Wahl mit dem Gismo am Ende des Straßenstückes zuerst auf das gerade Maß mit dem gewünschter Radius R x Pi. (Muß nur ungefähr sein, besser ist ein paar mm mehr.) Ziehe dann das Ende zu einen Halbkreis und zum Schluß in die gewünscht Höhe. Das geht alles mit den 3 Gismo-Pfeilen am Ende des Straßenstückes. Auch diese Höhe kann ein paar mm vom gewünschten Wert +/- 0,xx abweichen, aber man kann ja die angrenzenden Straßenteile dieser kleinen Höhendifferenz anpassen, dann sieht man keinen Knick oder Sprung im Übergang. VG, Hawkeye
-
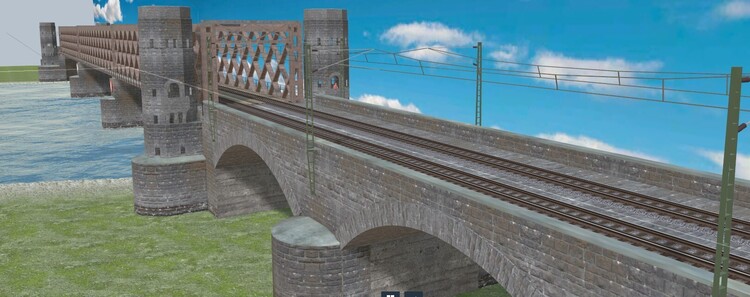
Das Modell ist ja schon schon skaliert, der normale Gleisabstand ist noch geringer. Um auf den Abstand der Märklin M-Gleise zu kommen, würde die Brücke riesig werden. Und dann siehst es auch nicht mehr realistisch aus. Leider. VG, Hawkeye
-
Hallo, ich hatte auch mal über Module nachgedacht und dieses mal angefangen. Um die Oberleitung in der Brücke zu realisieren, war aber maximal nur ein Gleisabstand von 4,5m zu realisieren. Der passt aber nicht zu anderen Modulen. VG, Hawkeye

-
Hallo Axel, hier die Antwort auf deine Frage. Na gut, dann wäre es doch schön, wenn sich ein Modellbauer für die Überarbeitung finden würde. Kannst du den erkennen, mit welchem Programm Modelle erstellt wurden? Blender oder SketchUp ? VG, Hawkeye
-
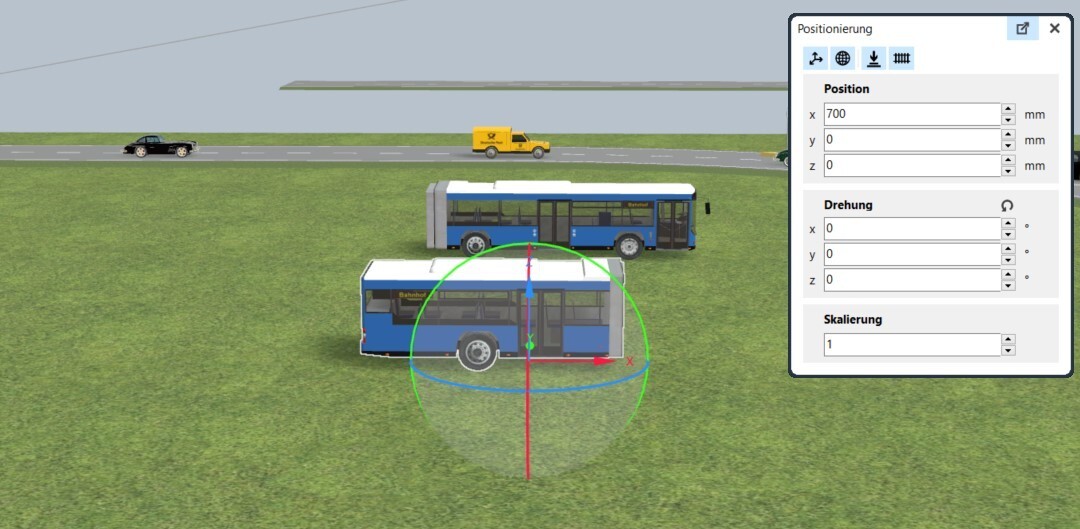
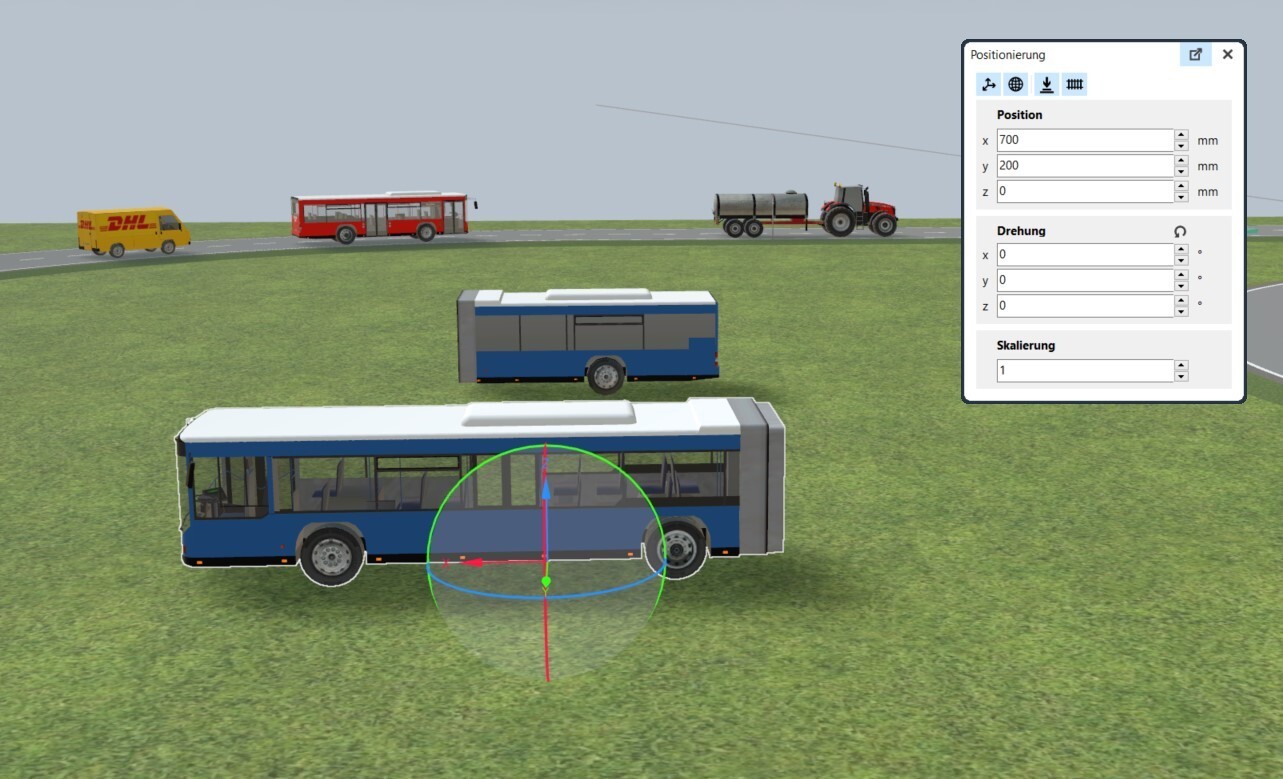
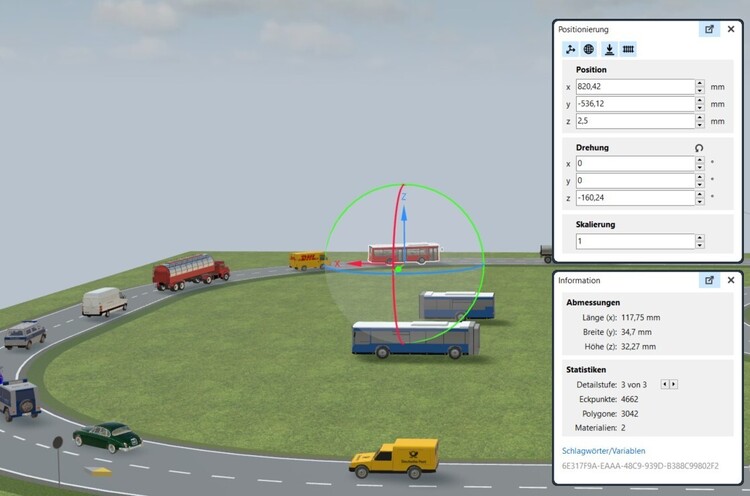
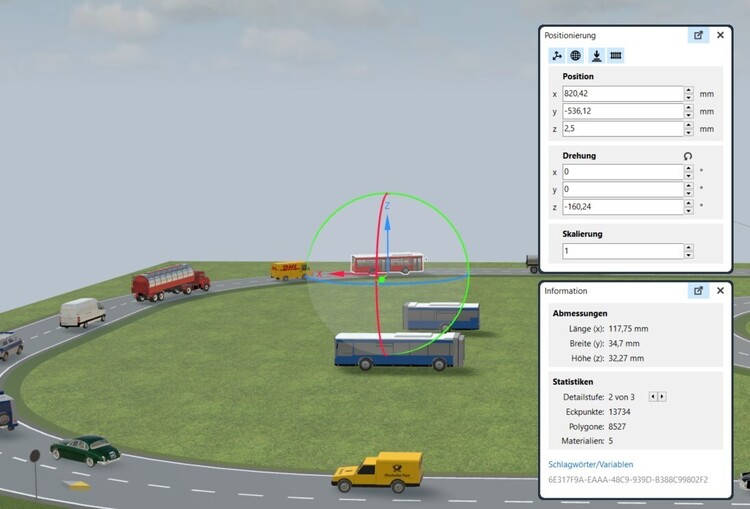
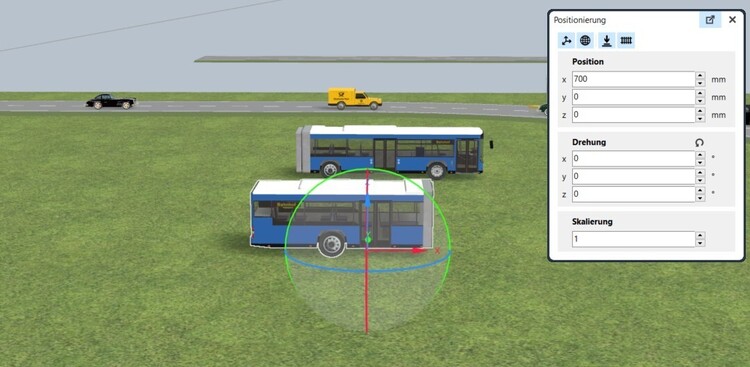
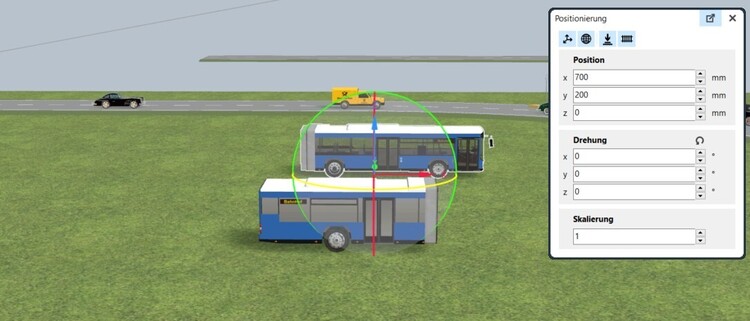
Hallo Neo, würde ich ja gerne so stehen lassen, aber ..... Hierzu mal ein einfacher Test. Der Vorderwagen ist in dieser Einstellung 200mm hinter dem Nachläufer aufgestellt. Nur ein Mausradklick weiter schaltet der Nachläufer schon auf LOD2, der Vorderwagen nicht, obwohl er in dieser Ansicht deutlich hinter dem Nachläufer steht. Damit habe ich ein echtes Verständnisproblem. Die um 180° gedrehte Ansicht kann ich soweit ja noch nachvollziehen. Die Entfernung für das Umschalten der LOD-Stufen sollte doch vom Betrachtungsstandpunt abhängen. Das ist hier doch eindeutig nicht der Fall. VG, Hawkeye
-
Das würde doch schon helfen, danke. VG, Hawkeye
-
Hallo Karl, ja, das ist mir bewusst. Der Modellbauer erzeugt die 3 LOD-Stufen. Mir geht es hier eher um die Frage, ob die Umschaltung auf LOD-Stufe 2 nicht viel zu früh erfolgt. Diese erfolgt im Programm, und darauf hat wiederum der Modellbauer keinen Einfluss. VG, Hawkeye
-
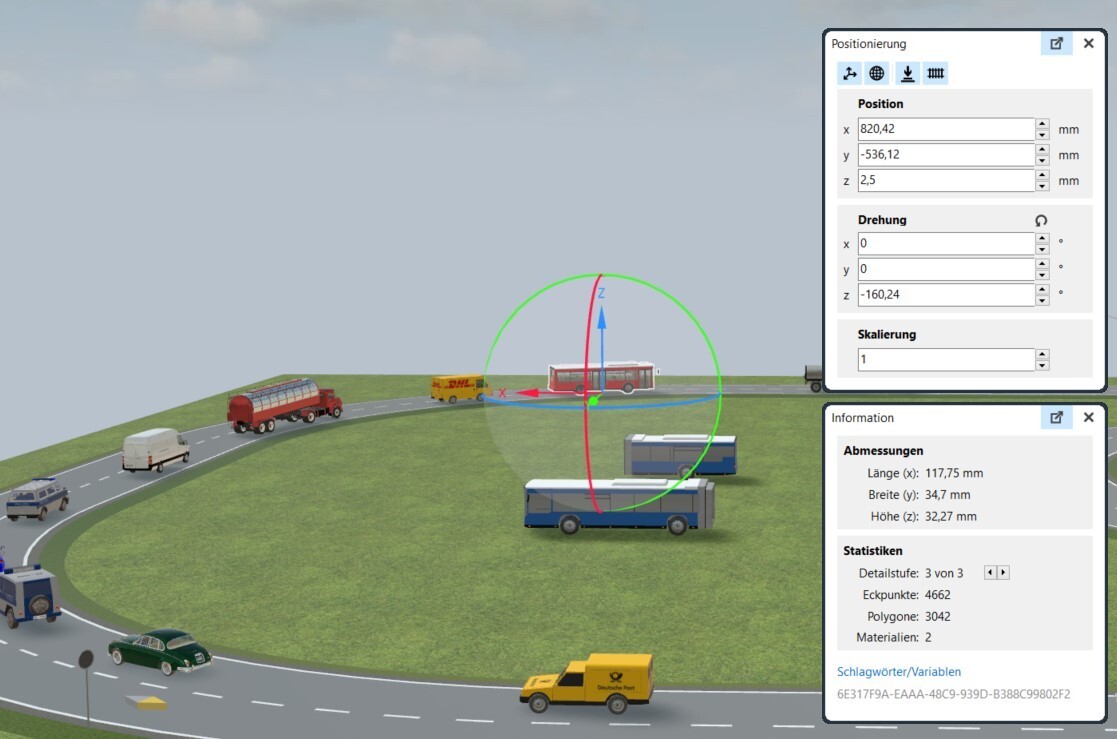
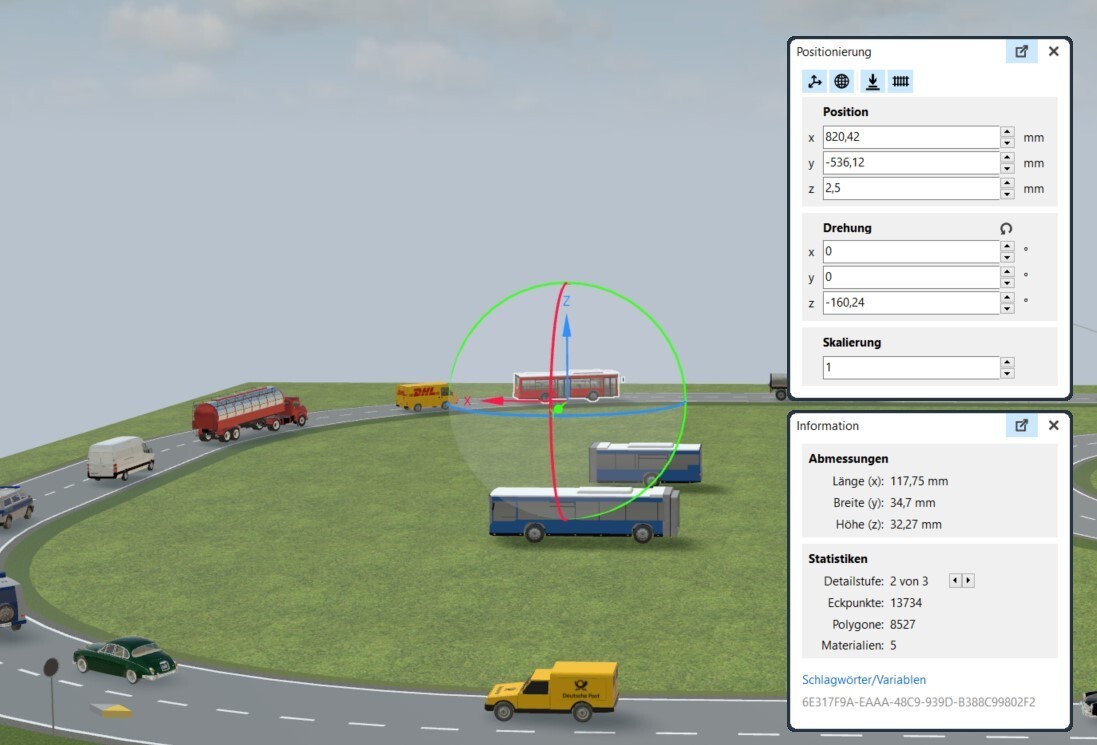
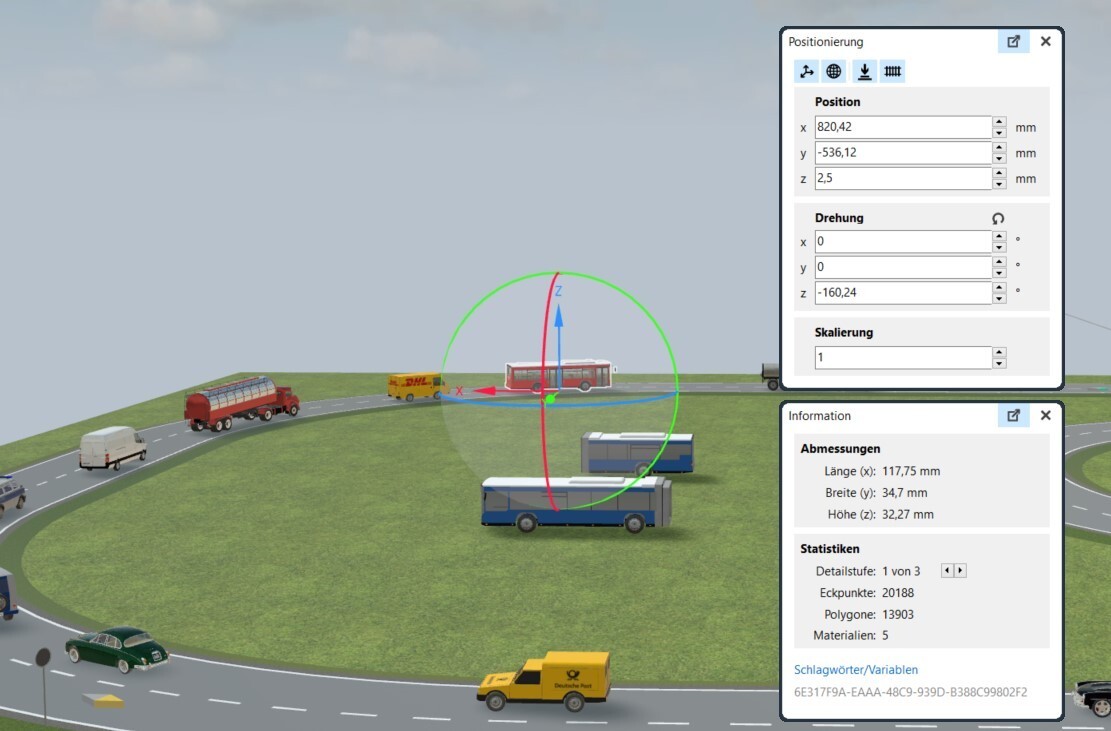
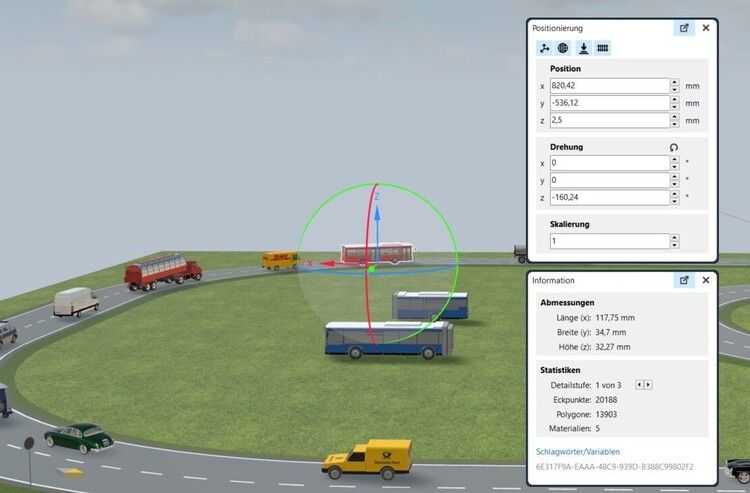
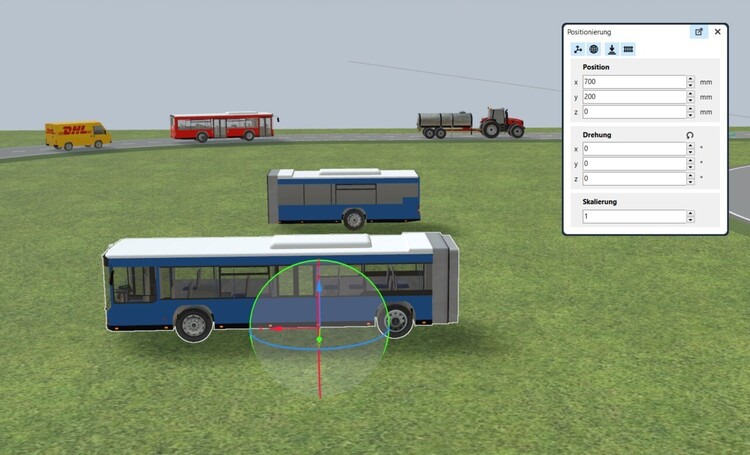
Hallo @Neo, deine LOD-Stufen benötigen dringend eine Anpassung. So wie die Umschaltung der LOD-Stufen gerade bei Fahrzeug-Modellen im Moment abläuft, ist sie ein echter Spaßverderber! Hier ein schönes Beispiel des "eigentlich" tollen Gelenkbusses, wenn er denn zeigen dürfte, was in ihm steckt. Um ein Paar Millimeter herausgezoomt, dann schon dieses Bild. Um ein Paar weitere Millimeter herausgezoomt, hat auch der Vorderwagen schon umgeschaltet. Man beachte hierbei hinten links den roten 2achser Bus! Wenn der in dieser Bildeinstellung die LOD-Stufe wechseln würde, hätte ich Verständnis dafür. Aus meiner Sicht ein echtes No Go! VG, Hawkeye



-
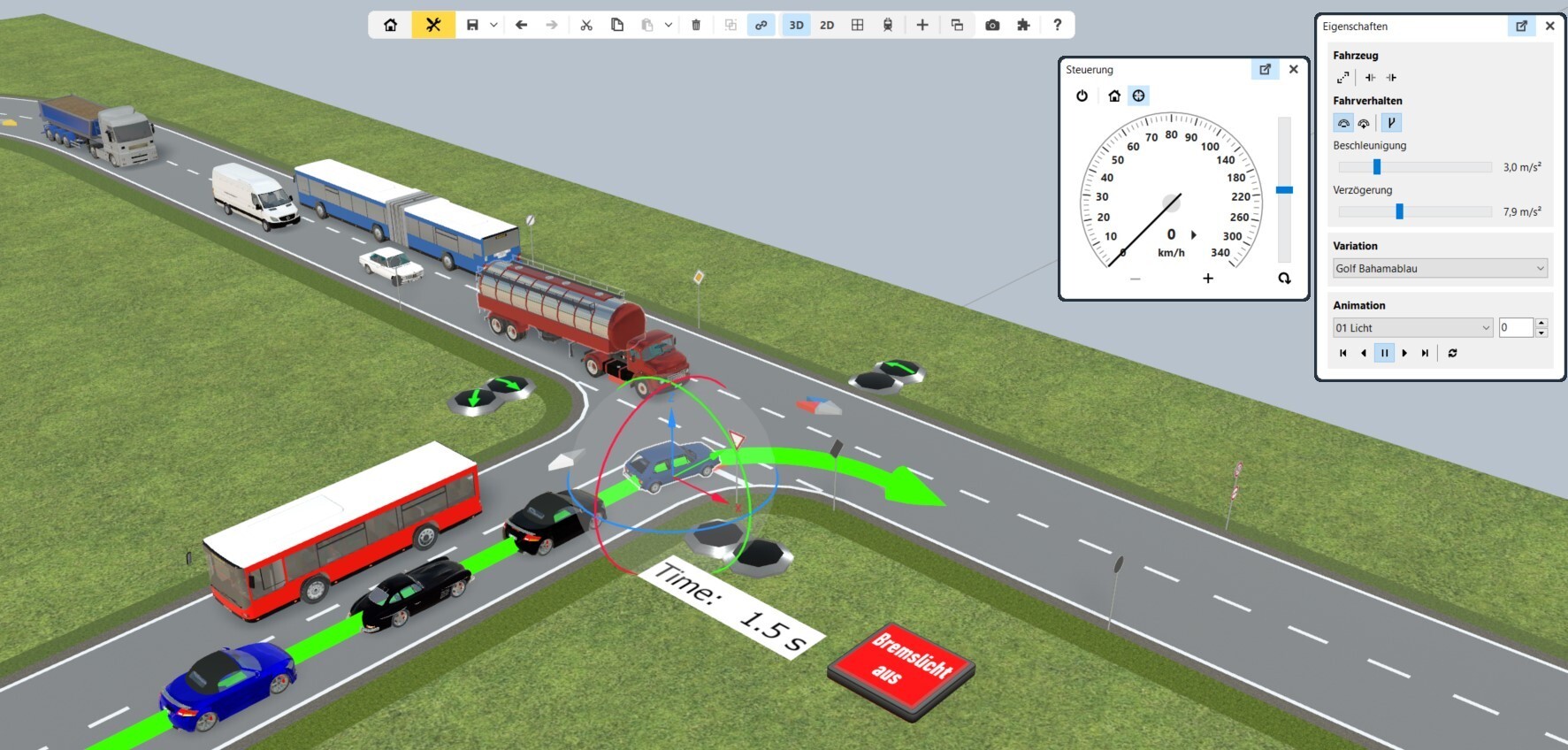
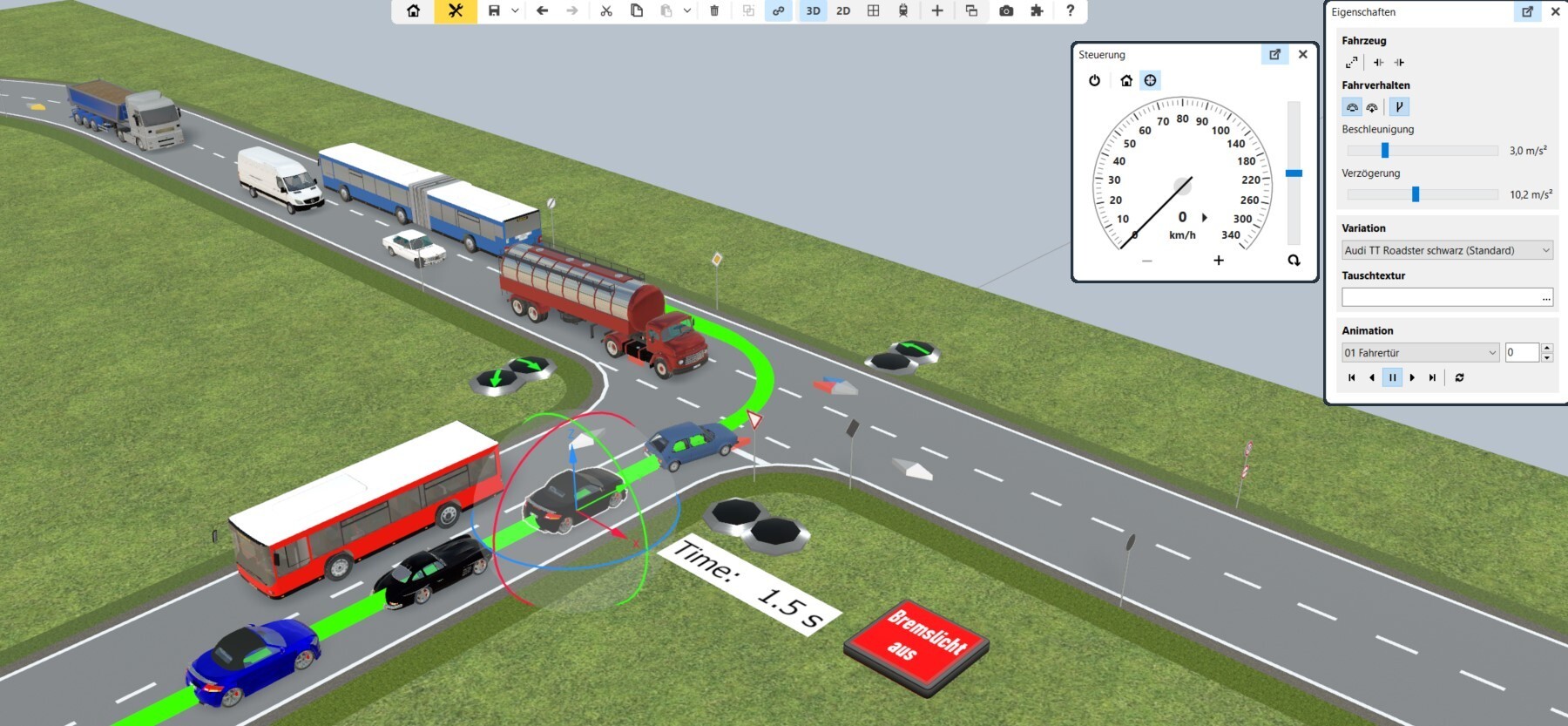
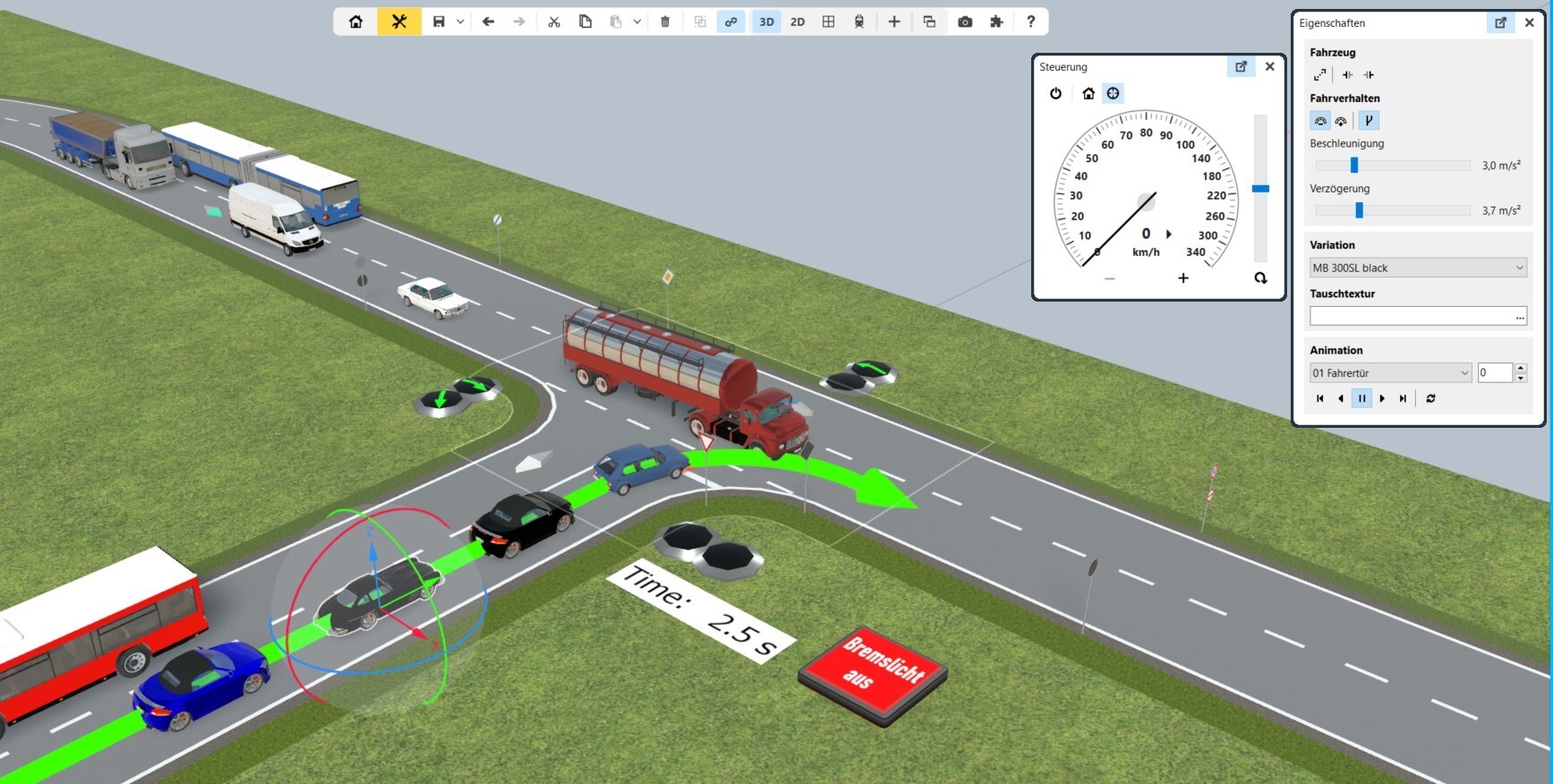
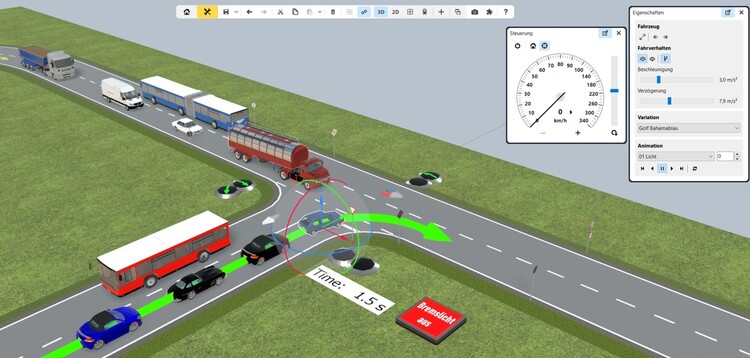
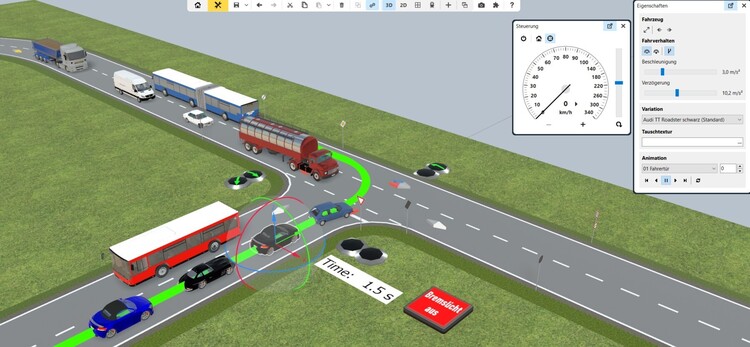
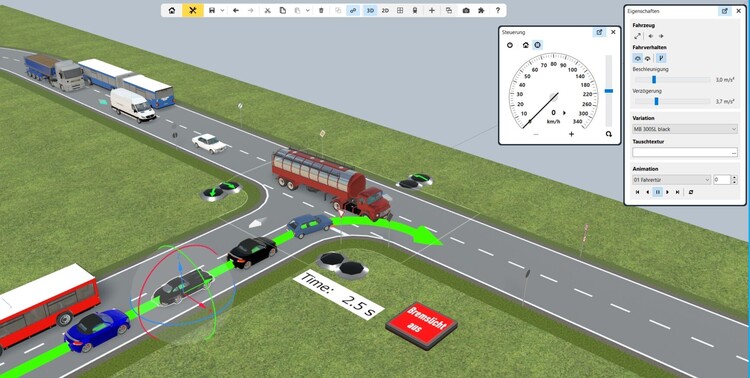
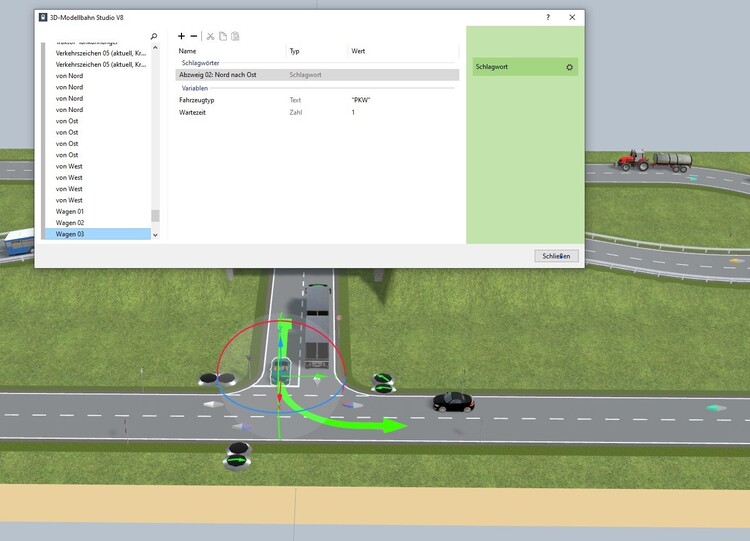
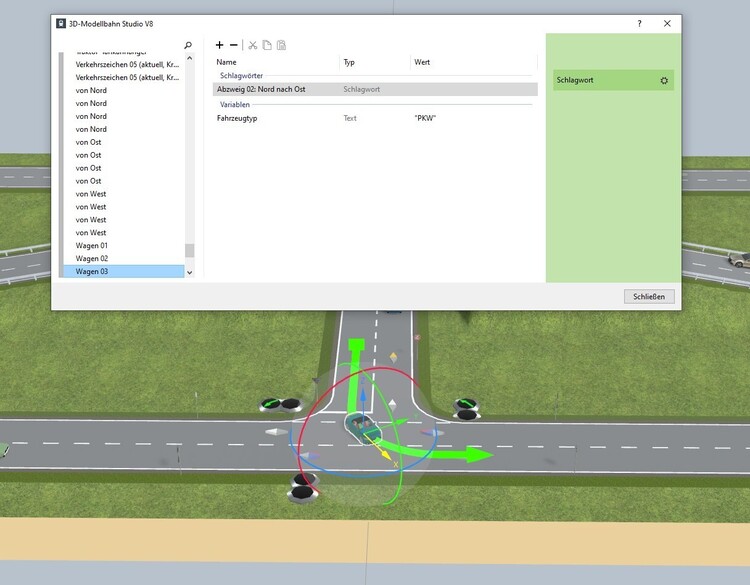
Hallo, hier endlich ein Lösungsvorschlag für das Problem des "durch Fahrzeuge hindurchfahren" bei verschiedenen Fahrzielen von Fahrzeugen an Kreuzungen oder Abzweigen. Wenn zwei hintereinander fahrende Fahrzeuge unterschiedliche Ziele ansteuern, dann passt sich das nachfolgende Fahrzeug der Geschwindigkeit des vorausfahrenden Fahrzeugs an. Die automatische Beschleunigung ist beim Verfolger ausgeschaltet, da er sonst an der Kreuzung durch vorbeifahrende Fahrzeuge in die Kreuzung hinein und durch das stoppende Fahrzeug hindurchgezogen würde. Zur Verdeutlichung der Zielrichtungen der Fahrzeuge an den Bremskontakten, sind die Spuren (Radien) der Abzweige gegenüber der "Katalog"-Version verändert und die Animationen "Blinker" eingerichtet. Die Kurven direkt hinter den Abzweigen sind bewusst sehr eng gewählt, da die Geschwindigkeit eines Verfolgers in Abhängigkeit des Abstandes zwischen den Fahrzeugen nur linear als Strecke und nicht im Bogenmaß ermittelt wird. (Falls jemand hierfür eine Idee hat, wie man das bei Straßen mit mehreren Spuren auch noch realisieren könnte, . . . nur zu. ) Fahrzeuganimationen "Blinker" und "Bremslicht" werden ausgeführt, soweit im Modell vorhanden. (Golf - ohne "Bremslicht", Polizei - komplett ohne Animationen) Da die Animationen bei "Tageslicht"-Einstellung nur schwer zu erkennen sind, macht es eigentlich nur Sinn, den Schalter "Bremslicht" einzuschalten, wenn man in der Fahrzeugkamera mitfahren möchte, oder direkt mit der Kamera an die Kreuzung heranfährt. (Die Timer-Einstellung ist 0,5s) Die Sicherheitsanzeigen können wie gehabt unter Ebenen eingeblendet werden. Viel Spaß, beim Testen. Die ein oder andere Einstellung kann bestimmt noch optimiert werden. Abzweig-Vorfahrt achten 01.mbp Anregungen und Kritik willkommen. VG, Hawkeye


-
Hallo @Neo, nach unzähligen Versuchen habe ich das Problem des "durch Fahrzeuge hindurchfahren", bei unterschiedlichen Spuren wohl endlich gelöst. Du hattest recht, die von mir gewünschte Information ist dabei doch nicht hilfreich. Es muss an diesen Abzweigstellen, bei denen die Fahrzeuge auf unterschiedlichen Fahrspuren stehen und weiterfahren, der Abstand des Verfolgers zum vorausfahrenden Fahrzeug ständig überprüft werden und die Geschwindigkeit des Verfolgers dem vorausfahrenden Fahrzeug angepasst werden. Dafür muss die "automatische Beschleunigung" des Verfolgers aber auch temporär ausgeschaltet sein, damit er von vorbeifahrenden Fahrzeugen nicht doch wieder beschleunigt wird. Meine Anfrage hat sich damit erledigt. VG, Hawkeye
-
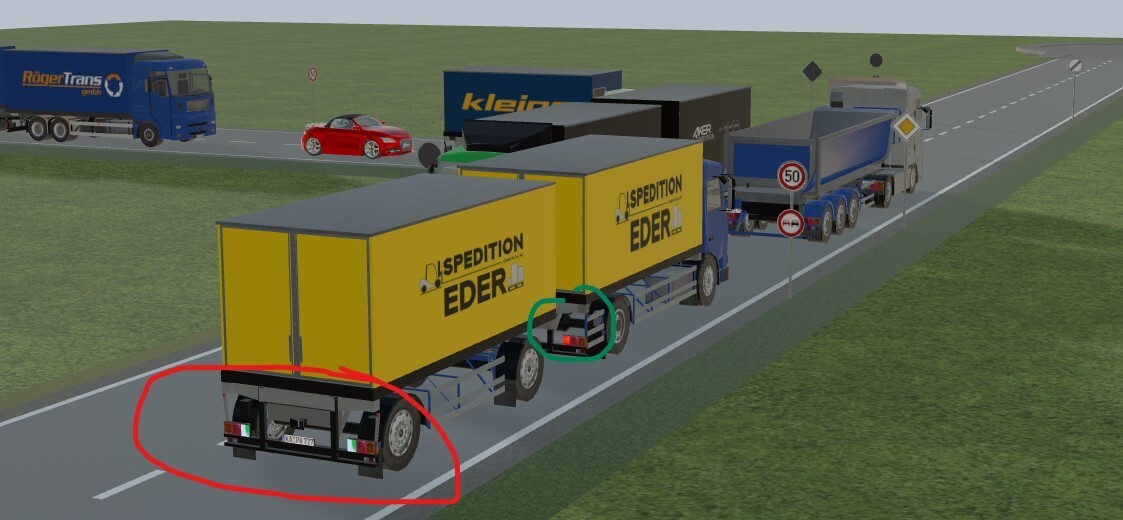
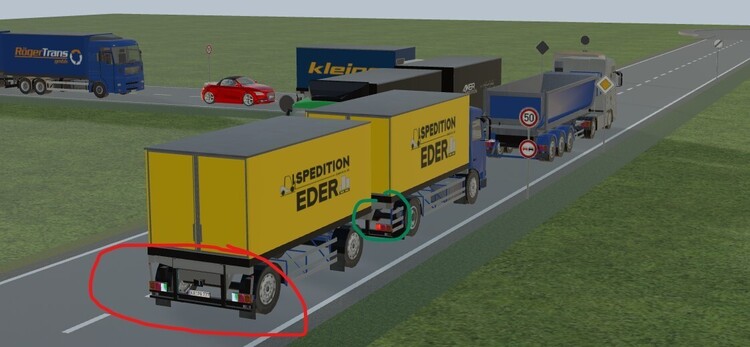
Hallo Wolfgang, ist doch alles etwas komplizierter als gedacht. . . . Aber hier wird nicht aufgegeben! Zur Ablenkung und um den Kopf freizubekommen, habe ich noch ein paar nette kleine Zusatzfeatures eingebaut. Die Fahrzeuge blinken jetzt bei Abbiegen und die Bremsleuchten werden ebenfalls aktiviert. Apropos Bremsleuchten: Der Anhänger der "Spedition Eder" müsste mal in die Werkstadt zur Kontrolle der Kfz-Beleuchtung. Beim der nächsten TÜV Inspektion fällt er sonst durch. VG, Hawkeye

-
bei mir schon. Wenn du eine Fahrstraße über mehrere Signale definierst, muß auch die gesamte Strecke frei sein. Besser ist es die Fahrstraßen von Hauptsignal zu Hauptsignal zu definieren. Der „Dreier“ Schienenbus hätte die Strecke gar nicht betreten dürfen.

-
🤔 Vielleicht links vom Gleis.
-
Hallo @Phrontistes, macht eigentlich wenig Sinn ein Signal direkt in eine Weiche zu stellen. Meine Vermutung ist, das die Fahrspur der Weiche nicht aktiv ist. Das kann man aber auf dem Bild nicht erkennen. Auf welcher Weichenspur steht der GK des Signals und welche Weichenstellung ist eingestellt? VG, Hawkeye
-
Danke Götz, Das „stattdessen“ habe ich überlesen 🙄, kann man aber auch rauslesen. 😂 VG, Hawkeye
-
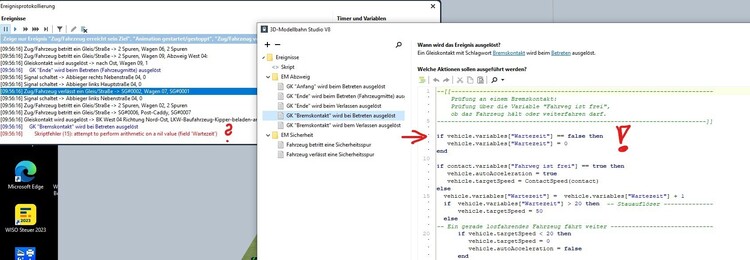
Hallo Neo, danke für die schnelle Antwort, das habe ich jetzt verstanden. Wenn der Bremskontakt betreten wird, wird die Variable "Wartezeit" an dieser Stelle in der EV temporär erst neu gesetzt. Muss das Fahrzeug halten, fängt die Zeit an zu zählen. Verlässt das Fahrzeug den "Bremskontakt", weil die Strecke frei ist, wird diese Variable auch wieder komplett gelöscht. Sie existiert also beim "Betreten" des Bremskontaktes nicht. Soll das so aussehen ? Welchen Unterschied macht das jetzt? Es funktioniert auch ohne. VG, Hawkeye
-
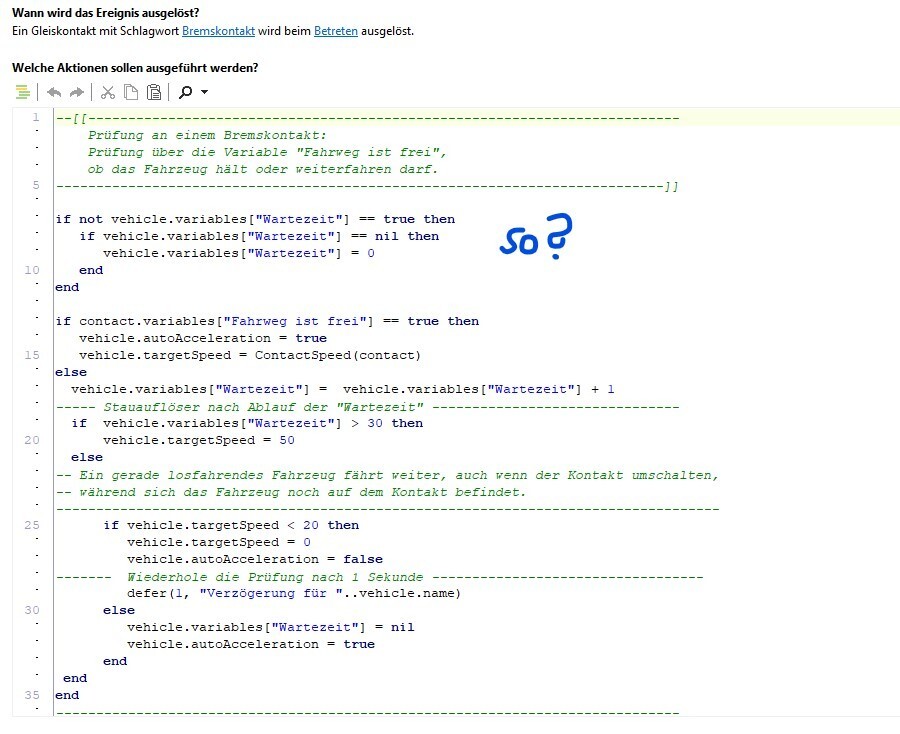
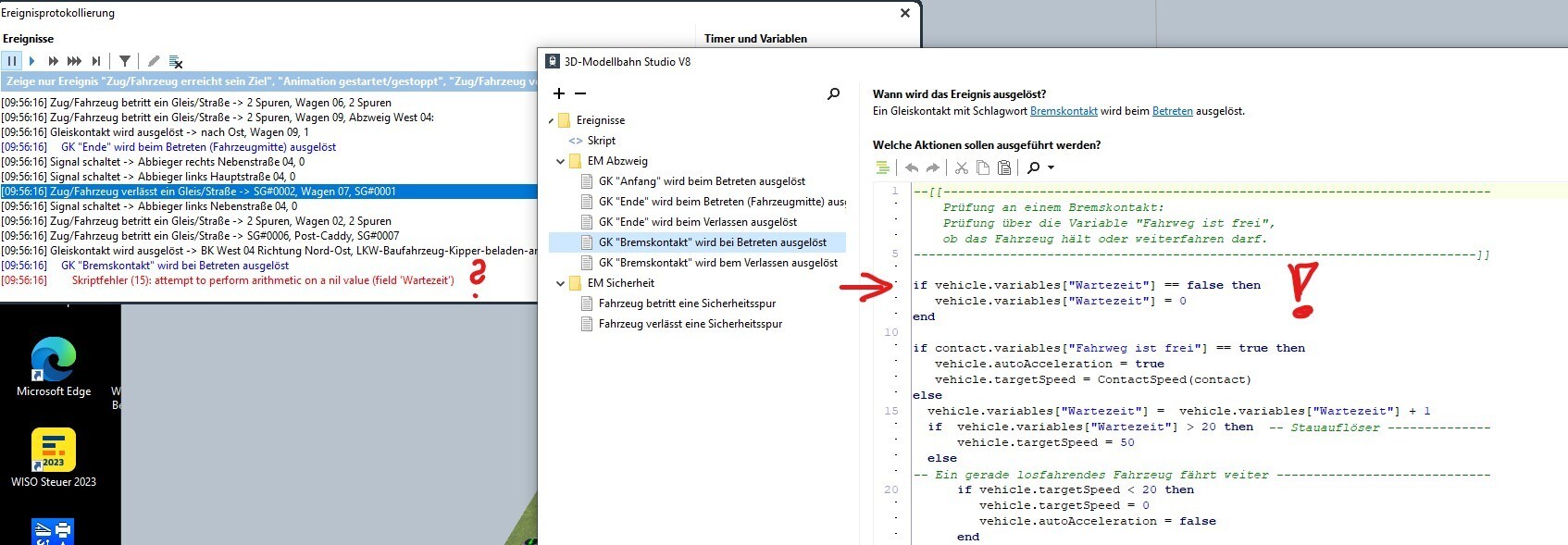
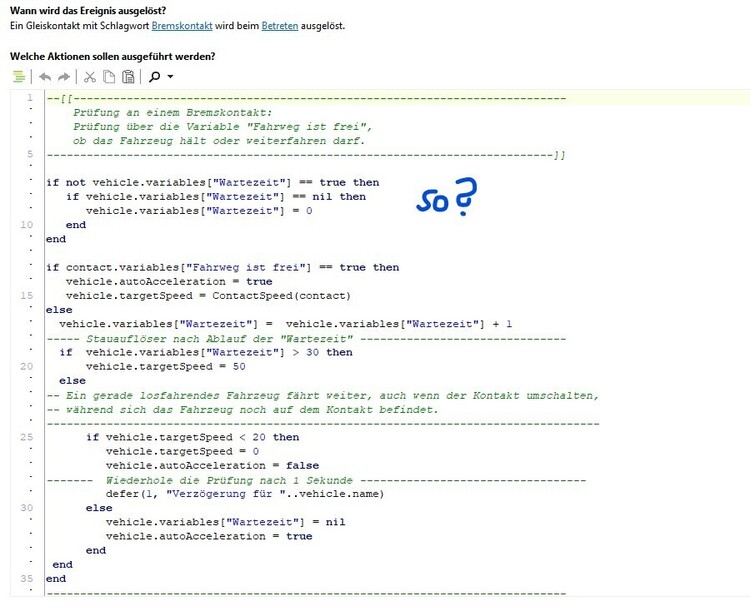
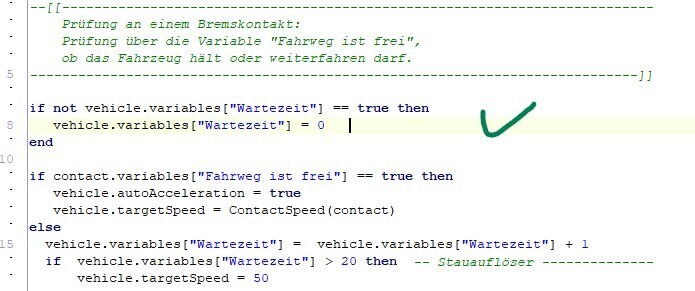
Hallo @Goetz, brauche mal deine Hilfe zum Verständnis von einer Lua-Anweisung. Folgende Anweisung läuft völlig unproblematisch: Aber von meinem Verständnis her ist eine "Verneinung" nicht notwendig, daher wollte ich die Anweisung ändern auf: Diese Änderung erzeugt aber in weiteren Verlauf an der Stelle 15 einen Fehler. Dieser Fehler wird in der "Verneinungsanweisung" (siehe oben) nicht erzeugt. Warum? Wo ist der Unterschied zwischen eine Variable ist "nicht wahr" und eine Variable ist "falsch". Das ist mir schon an mehreren Stellen aufgefallen, habe es aber bisher immer ignoriert, weil die Verneinung ja funktioniert. Gibt es dafür eine sinnvolle Erklärung? VG, Hawkeye
-
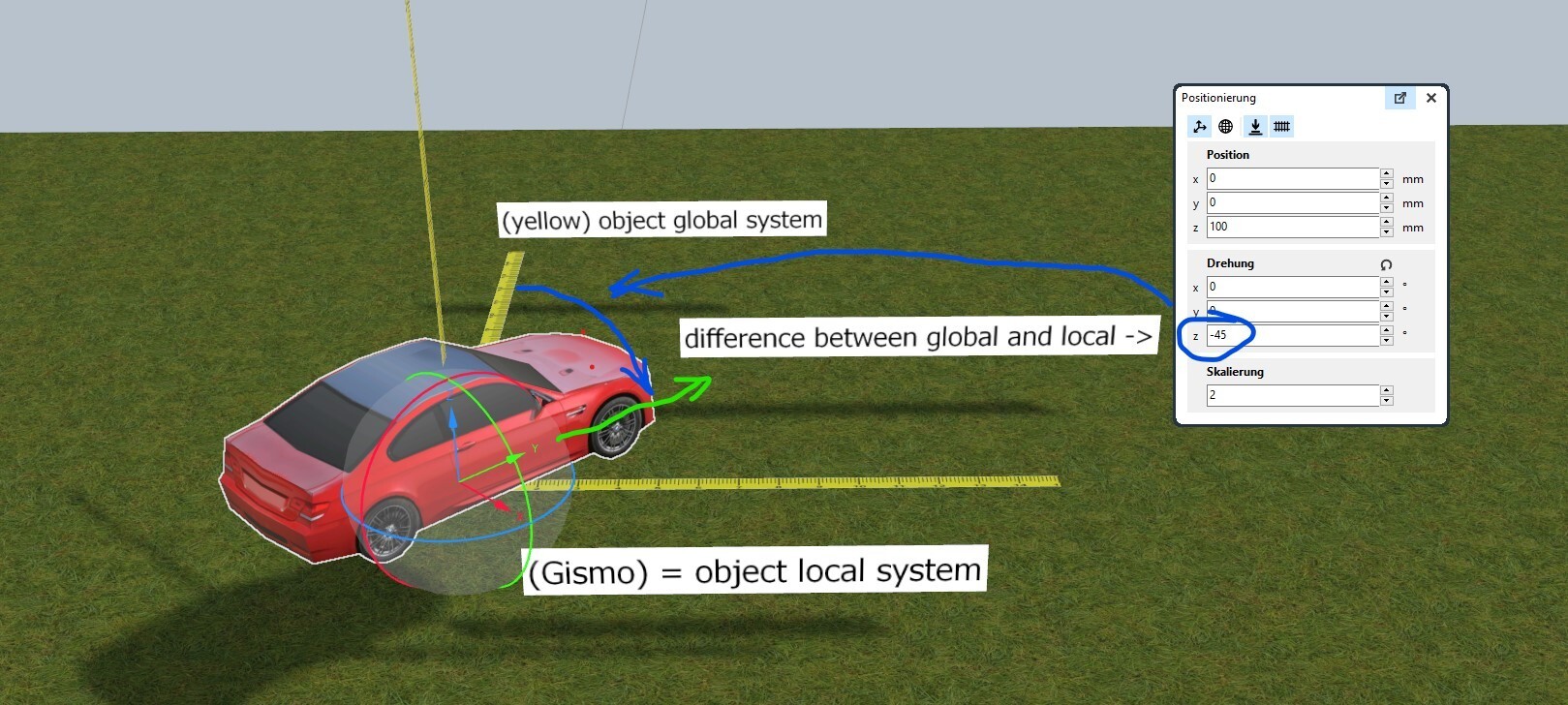
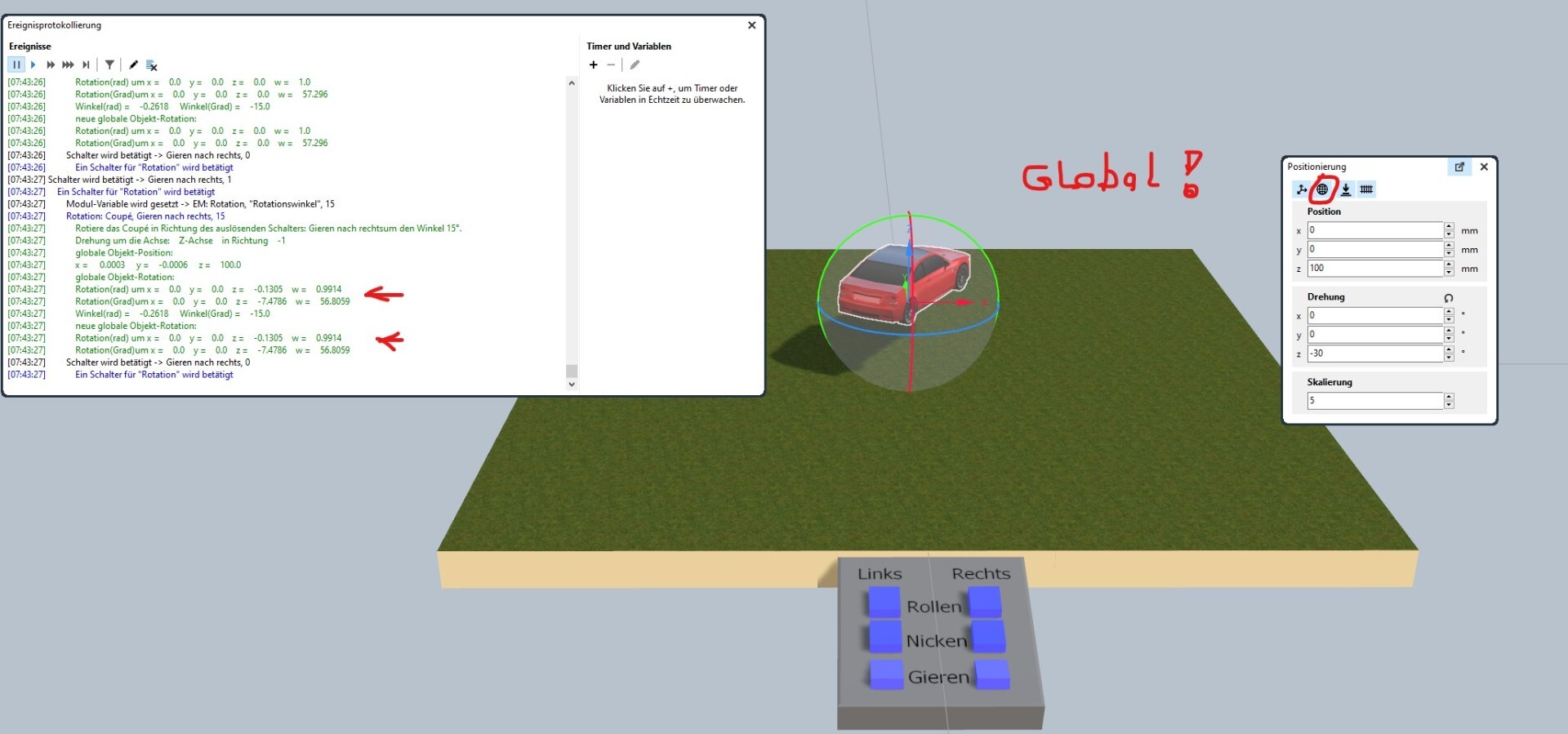
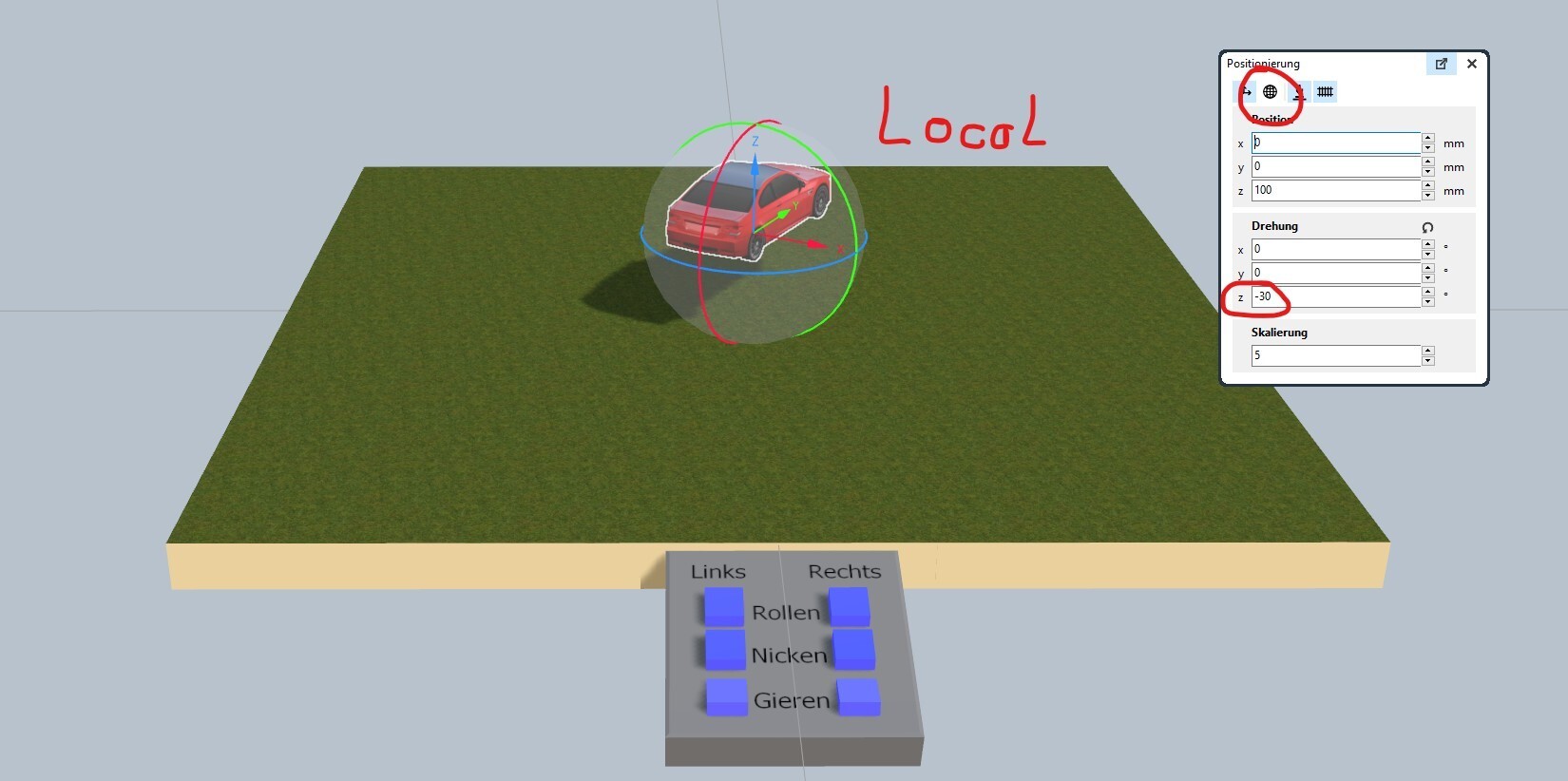
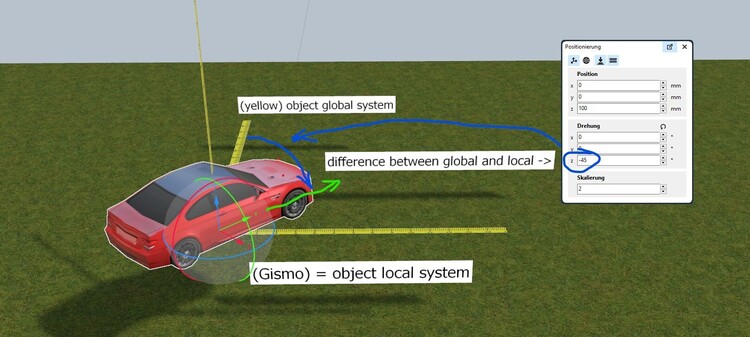
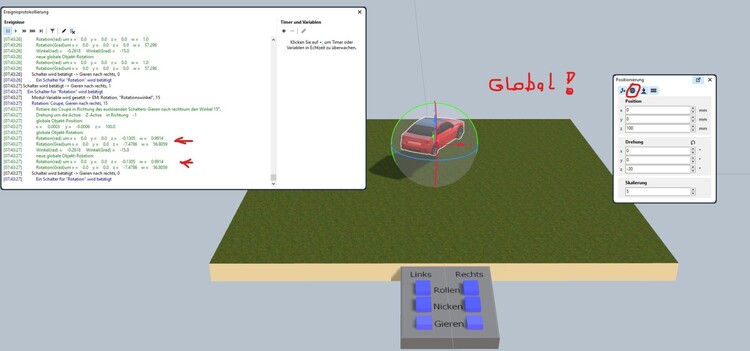
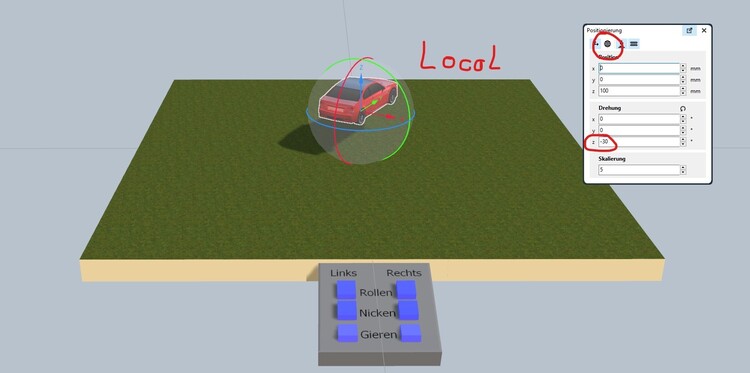
Hello @Herman, For explanation. I created the above example in MBS version V7. The possibility of changing from the object global to local system did not work in V7. It's a new feature since V8. Yes, that is correct. It is only a test print to get the program values before and after a rotation. That is what i wanted to tell you. You only get the values of the global system (0,0,0) not the difference between both systems that (0,0,-45) values of rotation in the window Not really, i wanted the rotation to be done in the local system not in the global one. I wanted to achieve that. But it didn't work. Kind regards, Hawkeye
-
Hello @Herman, the interpretation of the values presented in the example above may be difficult to understand. But for the rotation you will always get the values back in the global coordinate system. These do not change, so they are always the same. You want the z-rotation value of the local coordinate system relative to the global coordinate system. This value is probably not available in lua. Kind regards, Hawkeye
-
😂😂😂 Das war damals eine „Low Budget“ Produktion! Max. 150 Teile in der Standardversion.