HaNNoveraNer
Mitglieder
-
Benutzer seit
-
Letzter Besuch
-
Aktuell
Liest ein Thema: Neue Beta-Version 9.5 (Funktions-Update)
Alle erstellten Inhalte von HaNNoveraNer
-
 Also so Muschelartig oder wie ein Fächer. Braucht das dann so einen Transparenzgradienten im Verlauf der Textur?
Also so Muschelartig oder wie ein Fächer. Braucht das dann so einen Transparenzgradienten im Verlauf der Textur?
-
Hallo @maxwei Super gemacht, sowas meine ich. Mich interessiert allerdings mehr, wie die Objekte (z.B. für die Außenleuchte) dazu aussehen (Trapeze?) und wie die Textur aufgebaut ist bzw. wie dann das UV Mapping des Trapezes darauf aussieht? Gruß Thomas
-
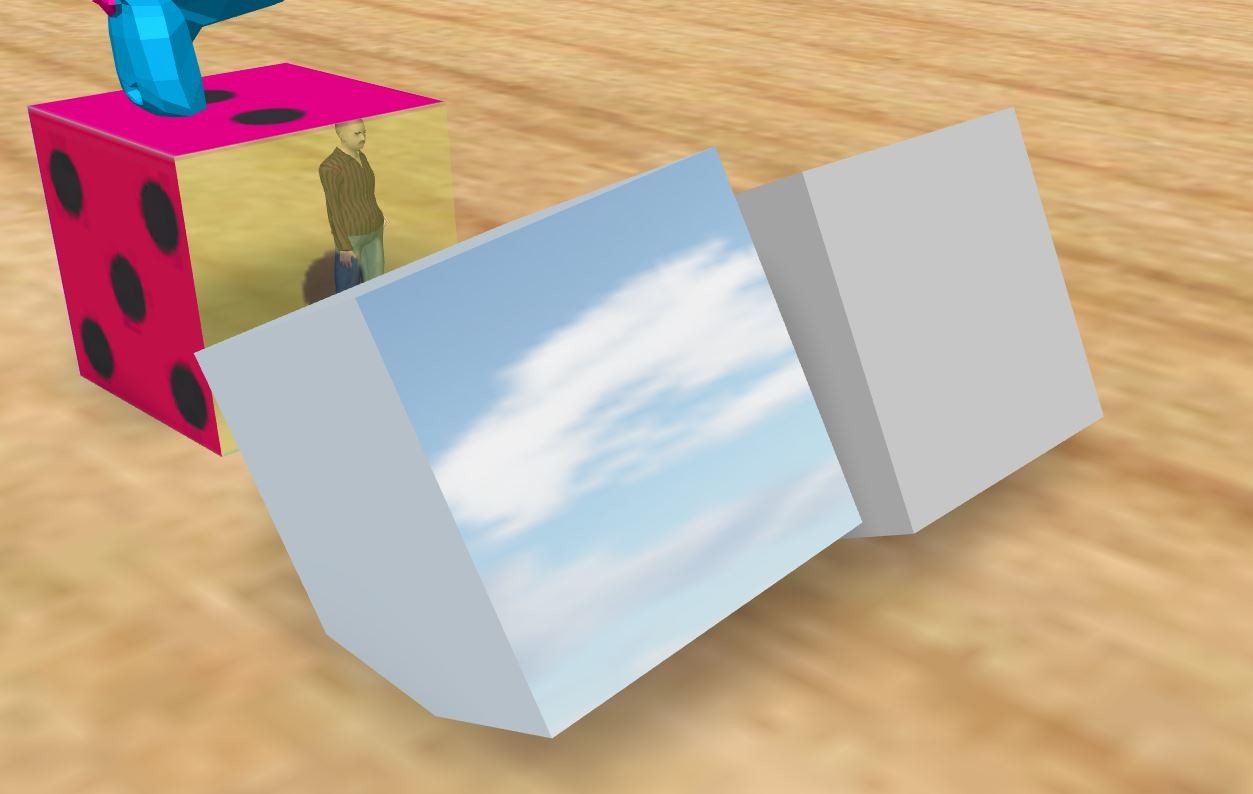
Und den gleichen Cube mal mit Himmelsreflexionen versehen. Das wirkt natürlich nur, wenn sich was bewegt. Und die Fläche etwas angestellt ist. _ENV_75_Cube = Objektname Hat eventuell jemand ein schönes Beispiel mit Textur für einen _LC Lichtkegel? (Wandleuchte, Laterne?) Dann würde ich es gerne hier aufnehmen! Danke, Thomas

-
Spezielle Objekte: Mit dem _Scale Objekt legt man den Maßstab fest und muß ihn nicht jedesmal eingeben beim Import. Außerdem habe ich einen Kontaktpunkt außerhalb des Cube definiert, indem ich einfach ein EMPTY Mesh in Blender erzeugt habe und das mit _CP_EMPTY1 benannt habe. Nun rasten 2 Würfel aneinander ein.


-
Jetzt bin ich im WIKI beim Kapitel Geräusche angelangt. >>> Jedes 3D-Modell kann mit einem Geräusch aus dem Katalog verknüpft werden. <<< Dazu habe ich jetzt einige Fragen: Kann ich die mit einer Animation synchronisieren? Wie verknüpfe ich das mit meinem Modell? z.B. Tür knarren beim Öffnen? Wie definiert sich der Radius, in dem das Geräusch hörbar ist? Das geht wohl nur über Aktionen mit Lua oder EV? Wie definiere ich das ein/ausschalten z.B. auch Martinshorn bei Polizeiwagen? _SoundRun Befehl? , dazu komme ich später
-
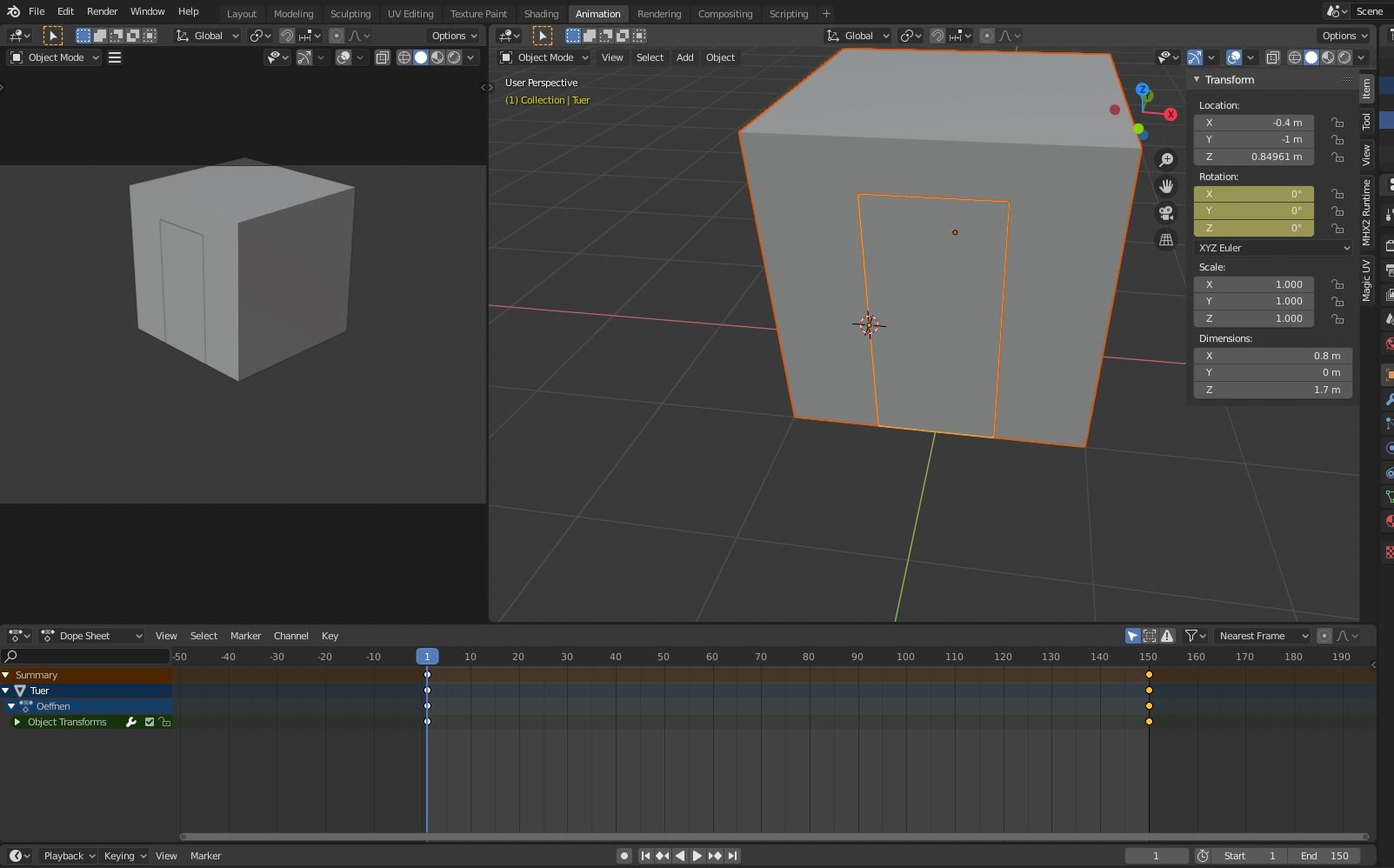
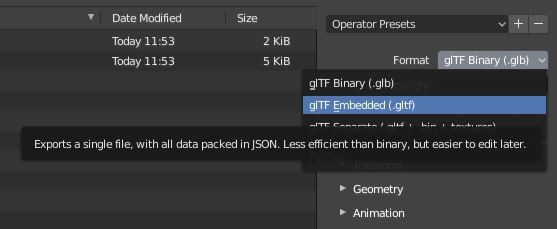
Animationen: Habe ich am Beispiel (nur öffnen) einer Tür ausprobiert. Also Rotation. In Blender dazu 3D Cursor und Origin auf die Drehachsen-Edge der Tür gelegt. Bei der Animation reicht es, nur den Startwinkel (0°) und den Endwinkel (90°) einzugeben. Die Winkel dazwischen berechnet Blender automatisch. Die Anzahl der Frames bestimmt die Geschwindigkeit der Animation. Ich habe es mal mit 15 und mal mit 150 Frames probiert. (bei 24Fps) Export nach "Part4.gltf" Dazu muß eine Beschreibung für die Animation erstellt werden: "Part4.anmim" Dort eingetragen: Tür Öffnen;1;150;NoAutoPlay;NoLoop Ergebnis:


-
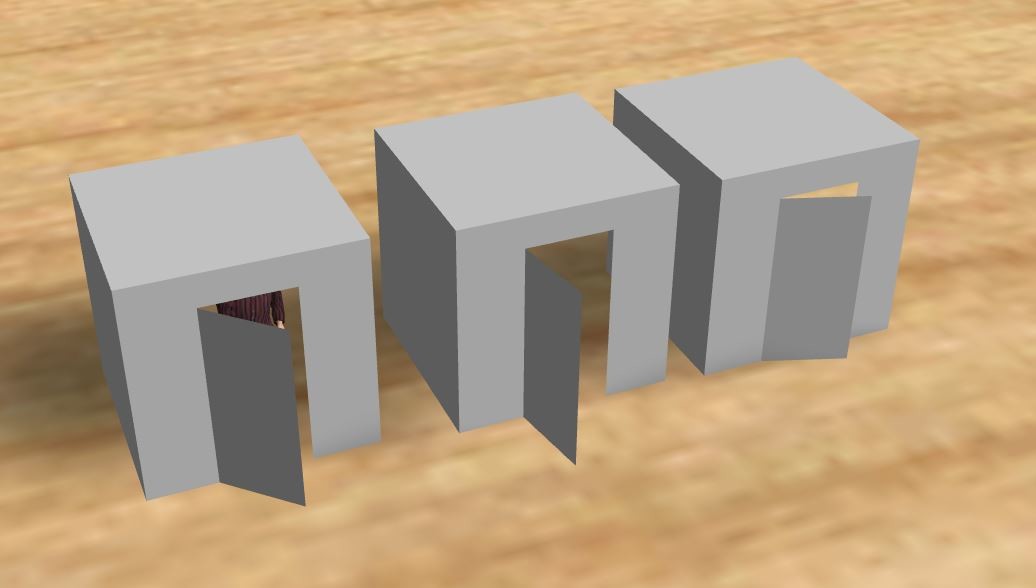
LOD Stufen Soweit ich verstanden habe, gibt es 3 Stufen für die Polygonreduzierung. 1. Das Grundmodell mit allen Polygonen 2. LOD1, um feine Details wegzulassen 3. LOD2, um aus der Entfernung nur noch die Umrisse darzustellen Leider kann man die Entfernungen nicht für jedes Modell, oder überhaupt, einstellen. Das MBS erkennt die LOD Stufen automatisch am Dateinamen (siehe WIKI) Ich habe das mal für LOD1 probiert. In Blender einen Ordner für die Details angelegt (in diesem Fall nur der Affenkopf). Dann einmal exportiert nach part3.gltf mit allen Objekten. Dann nochmal exportiert nach part3_LOD1.gltf mit ausgeblendetem Detailordner (Exportoption: only selected Objects) Im MBS verschwindet der Kopf dann, wenn die "Kamera" einigen Abstand zum Modell hat. Das hat übrigens alles nur 2 Materialien, würde aber auch mit einem Material noch funktionieren. Weiter im WIKI mit den Animationen, also erstmal ein paar Trickfilme erstellen ;-)


-
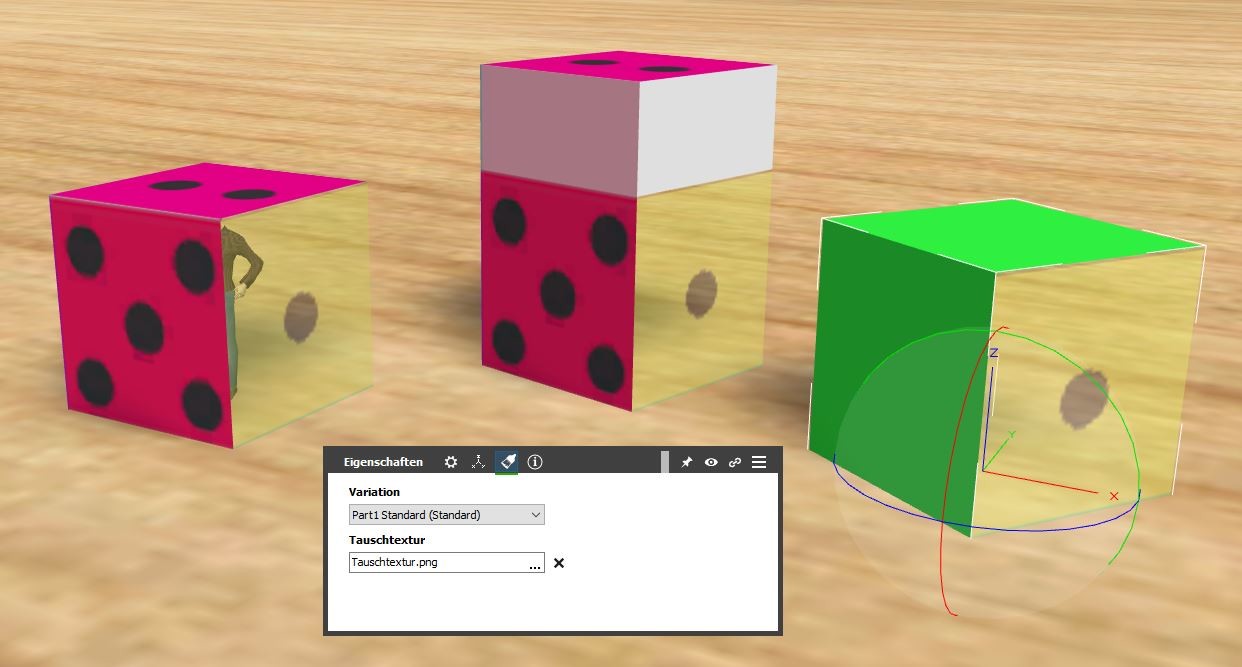
Inwischen habe ich auch herausgefunden, wie das mit den Texturen in der Variantenliste gemeint ist. Meine "Variationen.varlist" sieht nun aus wie folgt: Part1 Standard;Part1.gltf; Part2 Variation1;Part2.gltf;part1-Transparenz.png=Tauschtextur.png Man muß also den "in Blender benutzen Dateinamen der Textur" = dem "Dateinamen der Ersatztextur" setzen. Somit kann man Variationen erzeugen, ohne Tauschtexturen oder das Modell in Blender verändern zu müssen. Sieht dann im Beispiel so aus, da ich die Transparente Textur von der ersten Variation mit der Tauschtexturdatei überschrieben habe: Weiter geht's mit LOD Stufen und Animationen, außerdem wird der Cube noch leuchten, sprechen, rauchen, am Kran hängen und was noch so alles geht...

-
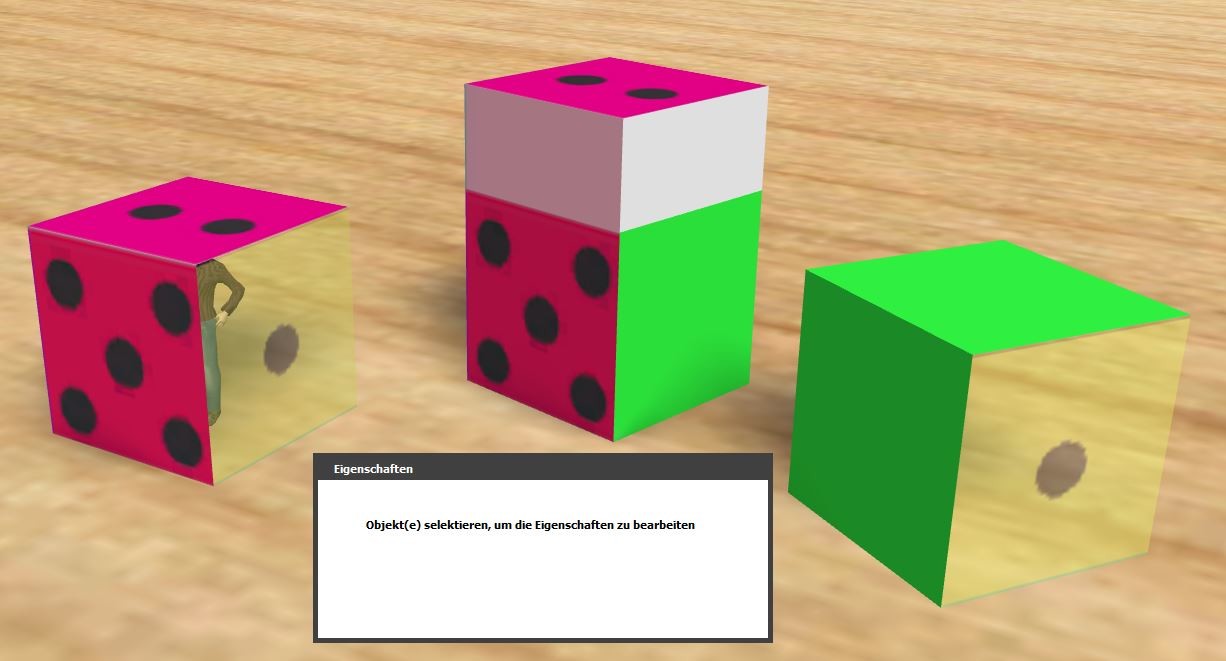
Weiter geht's im WIKI mit Tauschtexturen. Nennt man eine Textur: "_Custom.png" dann wird diese im MBS als Tauschtextur angezeigt und man kann für dieses Objekt eine andere Textur laden. Hat auch funktioniert... Man sieht hier das Standardmodell, die erste Variation, und das Standardmodell mit Tauschtextur für die nicht transparenten Faces.

-
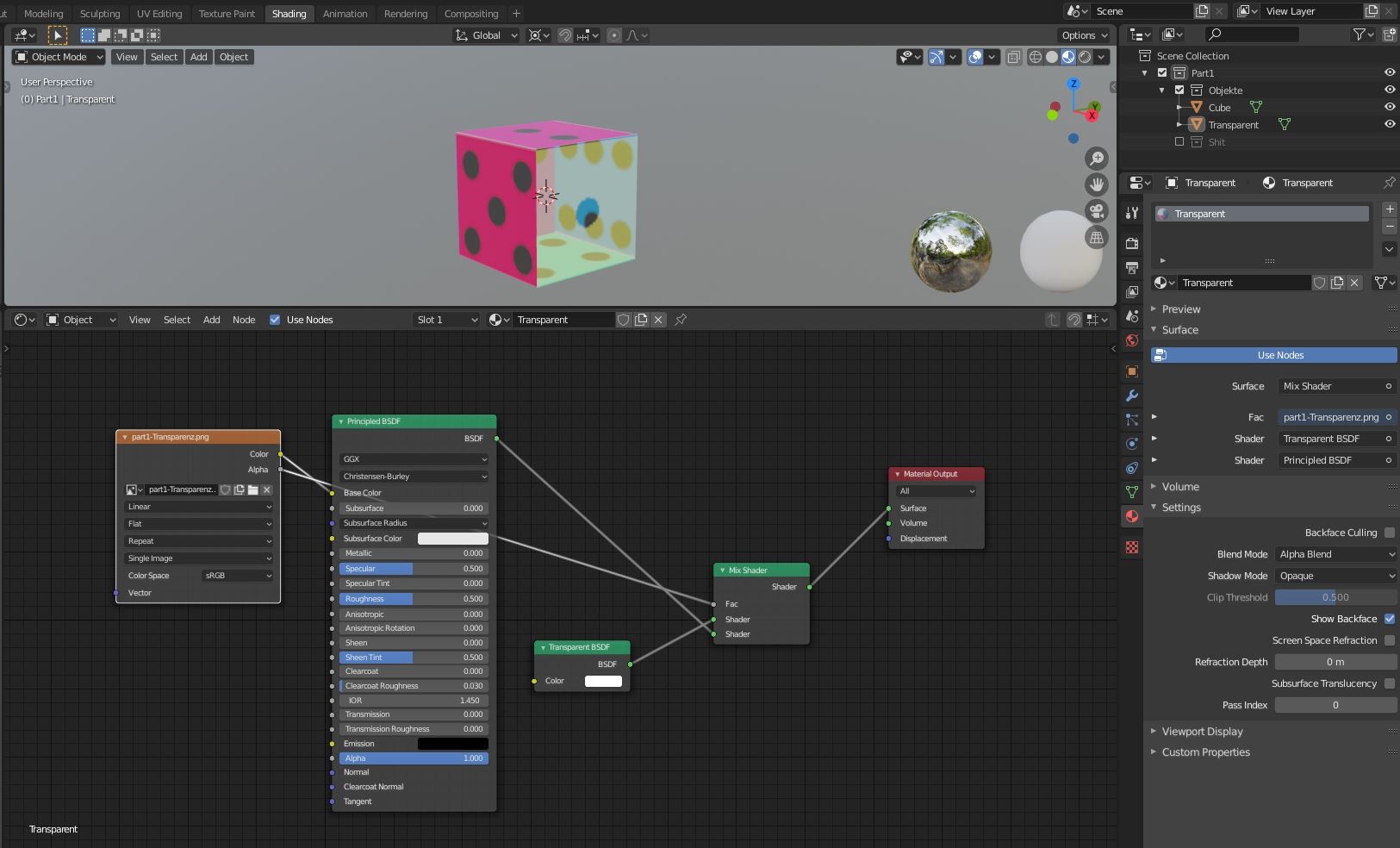
Habe noch ein wenig mit Blender rumprobiert. In Blender sieht man übrigens auch die Rückseiten der texturierten Faces. Will man die Transparenz dort auch sehen, muß man die folgenden Nodes ergänzen: (Transparent BSDF Shader, Mix Shader):

-
Variationen können lt. Wiki über Variationslisten erzeugt werden. Hier mein Beispiel: Part1 Standard;Part1.gltf;Texturname 1=part1.png 1,Texturname 2=part1-Transparenz.png Part1 Variation1;Part1.gltf;Texturname 1=part1.png 1,Texturname 2=part1.png oder soll es so aussehen? Part1 Standard;Part1.gltf;part1.png,part1-Transparenz.png Part1 Variation1;Part1.gltf;part1.png,part1.png Beide Variationen werden in beiden Fällen erzeugt. Jedoch sehen beide Variationen gleich aus. Ich habe in Blender 2 Texturen verwendet, eine ohne Transparenz und eine mit Transparenz. Den Cube habe ich in 2 Objekte aufgeteilt: Eine Seite, die das Transparente Material zugeordnet hat, und den Rest mit dem normalen Material. Im Wiki steht nun folgendes: << Die Angabe von Texturdateien ist optional. Falls definiert, werden nicht die Texturen im 3D-Modell geladen, sondern die in der Variationsliste angegebenen Dateien. >> Daher habe ich oben einfach die transparente Textur durch die normale Textur ersetzt für den 2. Texturnamen. Was habe ich evtl. falsch gemacht? (siehe unten, da habe ich das Rätsel gelöst)
-
Yepp. Und mit der Transparenz klappt es auch. Einfach die gewünschten Teile der Textur in eine eigene Ebene kopieren in paint.net und die Transparenz in den Ebenen-Eigenschaften wie gewünscht einstellen. Dann werde ich mal versuchen eine weitere Variation des Würfels zu erstellen... Forts. folgt...

-
In den Exportoptionen zu .gltf habe ich leider nichts gefunden in Blender. Man müßte irgendwie die Rückseite der Flächen auch mit einer (anderen) Textur überziehen können. Aber wahrscheinlich muß man dazu die Flächen duplizieren/verdoppeln und umdrehen.
-
Danke Bahnland! Das mit den Polygonen war mir klar, nur die Anzahl Eckpunkte... :-) @Timba:Das wird kein Blender Tutorial. Das sind nur grobe Anmerkungen für mich, damit ich später weiß, wie ich wo hin gekommen bin. Leider vergesse ich nach ein paar Monaten meistens wieder die Tastencodes :-) Und im Kontext kann es ja nicht schaden, wenn man nicht immer in die von Dir zitierten Blendertutorials umschalten muß, wenn man was sucht... Thema Transparenz: Ich habe einfach mal eine Fläche gelöscht: Alphakanal. Das sieht dann im MBS so aus: Backface Culling ist ausgeschaltet. Was muß man nun machen, um die inneren Seiten des Würfels zu sehen? Hier das Projekt: Part1.zip


-
@Andy: Wenn Du nichts beitragen kannst, dann laß es bitte... mach mir den Thread nicht kaputt :-( Ich zeige hier, wie ich es versuche zu realisieren. Weiter geht es mit einer Textur. Ich habe die mal mit 256x256 Pixeln erstellt als .png Dazu in Blender "U" und Unwrap. Die Texturdatei einbinden über den Button "Basecolor" und "Image Texture". Das sieht dann in Blender so aus: und im MOBA Studio: Die x-Achse weist in Blender und im Moba Studio von links nach rechts. Gleiche Ausrichtung. Mal sehen, wie es weiter geht... mit Transparenz oder erstmal Variationen...und natürlich Tauschtextur...



-
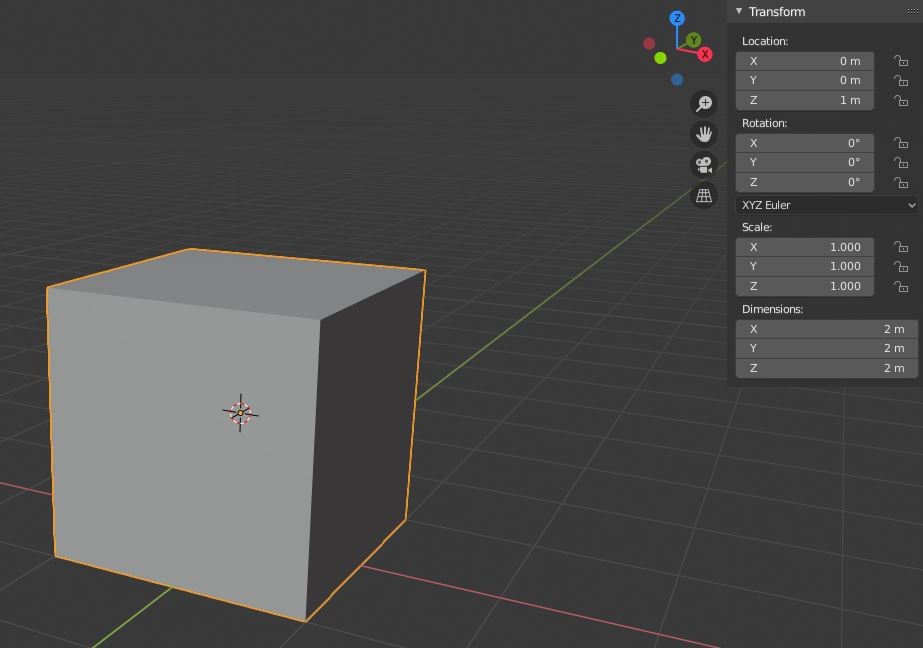
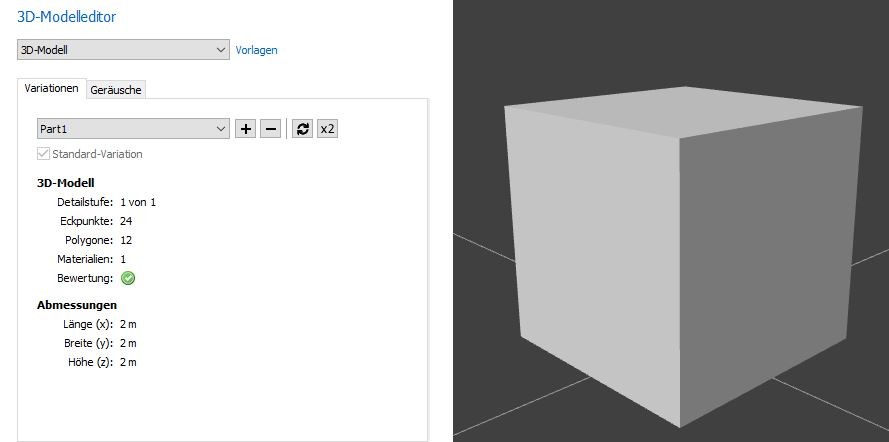
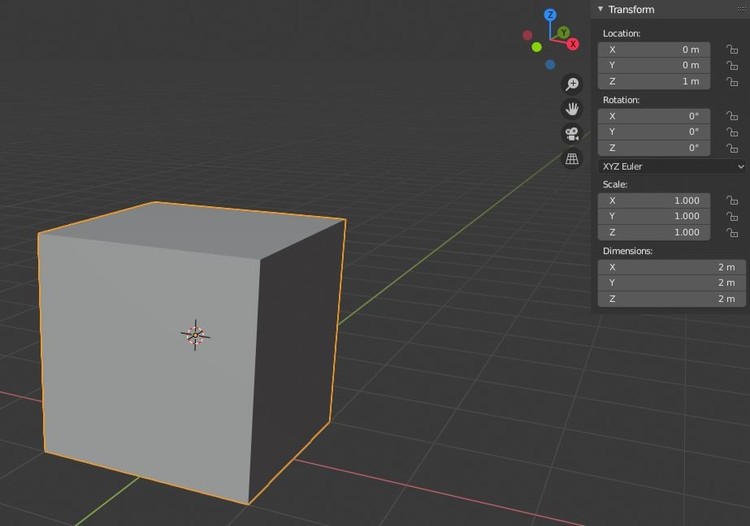
Und los geht's... ... natürlich mit dem Blender Cube. Damit er auf der Platte steht, muß er 1m höher gesetzt werden. In der realen 1:1 Welt soll er 2m hoch und breit sein. Export als .gltf Und als Standard Variation ins MBS 1:1 und Einheit m Vielleicht kann mal jemand erklären, warum da jetzt 24 Eckpunkte und 12 Polygone sind? Im MBS sieht das dann so aus: Weiter geht es dann mit der Texturierung...


-
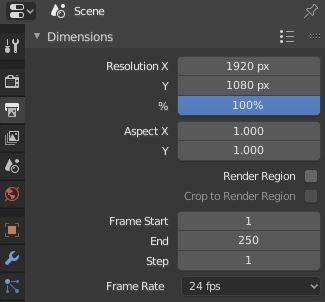
Vorbereitungen: >> Für animierte Modelle muss in Blender die Frame Rate im Output-Reiter auf 24 eingestellt werden. << War bei mir schon so eingestellt:
-
Moin Da ich gerade durch Dirt Rally2 Aktivitäten an der PS4 etwas von meiner Anlage Freiberg abgelenkt war, hab ich jetzt erstmal Lust auf was Neues. Also habe ich beschlossen, mal herauszufinden, was Modellbautechnisch alles möglich ist. Was bietet sich da mehr an, als das Modellbau Wiki von vorne bis hinten durchzuarbeiten und ALLES, was im MobaStudio möglich ist mal auszuprobieren. Dabei geht es mir aber nicht um die Schönheit der Beispielmodelle, sondern um das WIE und WO macht man was und WARUM. Werkzeug wird momentan Blender 2.8.2 Ich hoffe hier auf Eure Unterstützung und werde den Werdegang hier im Thread mit Beispielen und Bildern unterlegen. Ziel ist es, für JEDEN Anwendungsfall ein Beispiel als Template zu erzeugen, aus dem man dann "richtige" Modelle bauen kann. Und eben auch zu verstehen, wie das funktioniert. Dazu bleibt es nicht aus, daß ich hier im Thread einige Fragen stellen werden zu Blender und zu den Modellen, da ich auch einige Zeit nichts mehr mit Blender gemacht habe. Und schon garnicht der 2.8er Version. Forts. folgt...
-
Man kann die .glb aber importieren. Textur paßt auch. Was war denn jetzt das Problem mit dem Haus? lg Thomas
-
Hallo Eisbär Deinen Kommentar finde ich überflüssig. Ich finds gut, daß gmd seine Gedanken mitteilt. Außerdem kann man so noch seinen Senf dazu geben, was nicht mehr geht, wenn alles fertig ist. Gruß Thomas
-
Da wäre ich auch dafür. Dann könnte ich aus Rocrail über die Lokadresse z.B. die Lichter ein/ausschalten und die Stromabnehmer u.s.w. Mit nur einer Funktion, ohne für jedes Modell noch Spezifikationen für die Animation anzugeben. Gruß Thomas
-
Ich muß mal probieren, ob das bei dem Flexgleis funktioniert... Also Gleis auf sich selbst kopieren, dann skalieren und dann beide Enden wieder auf die Form des Gleises ziehen... Gruß Thomas
-
Hi @Neo Wäre es möglich in einer zukünftigen Version die Skalierung für jede Achse getrennt vorzunehmen? Beispiel> Tunnelröhren in meiner Anlage nachrüsten: Die Länge muß ich an die Gleise anpassen, aber die Breite und Höhe muß bei 1,3 liegen. Gruß Thomas
-
Da würde mich mal interessieren, wie ihr da ein sanft geschwungenes Gelände drunter baut, ohne viele Kanten und Ecken. Gruß Thomas
-