Hawkeye
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Hawkeye
-
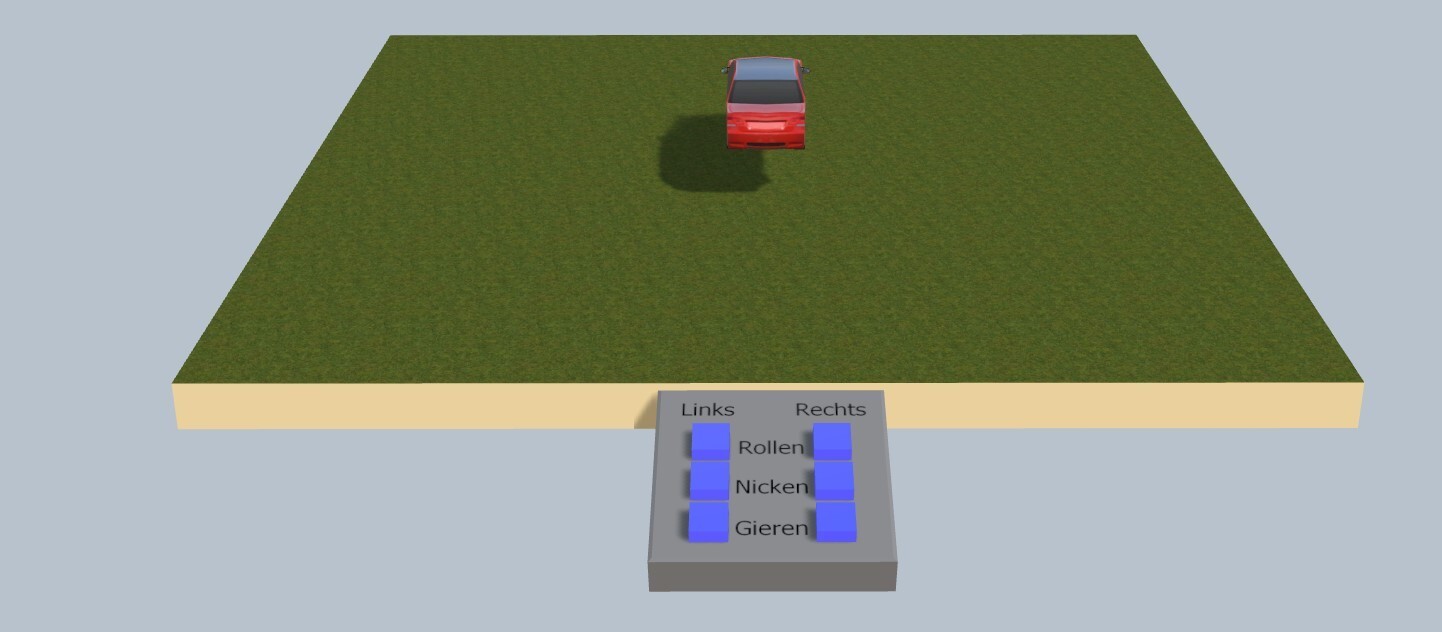
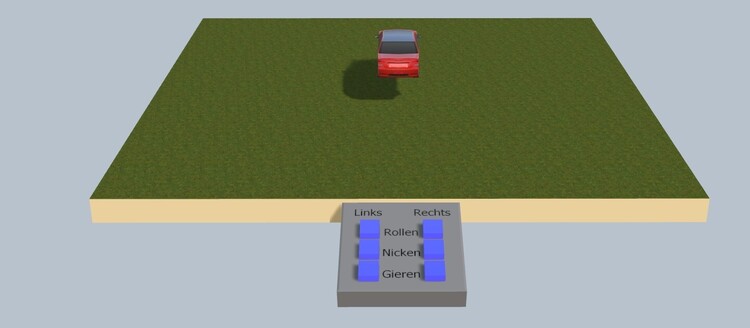
Hello @Herman, maybe this basic example (one of my experiments) will help you to find answers. Rotationstest per Lua-Anweisung.mbp (Sorry, it is not translated to english) Kind regards, Hawkeye PS: The Transformation only works in global koordinates, not in local koordinates of the vehicle
-
Hallo @Phrontistes, als die Verwindungen von Gleisen/ virtuellen Spuren im MBS eingeführt wurden, habe ich das mal etwas getestet. Air Race -Training Würde so etwas nicht auch zu deinem UFO passen? Hier der Link: VG, Hawkeye
-
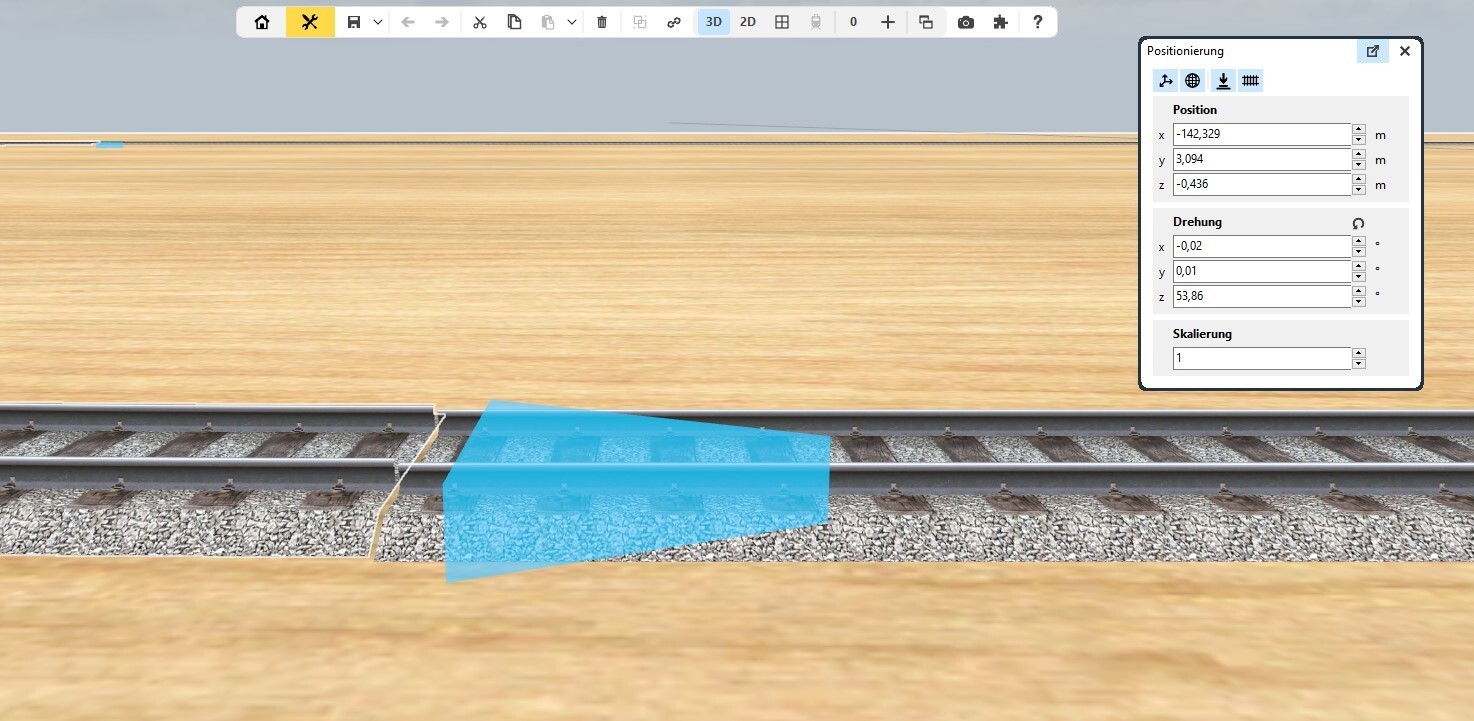
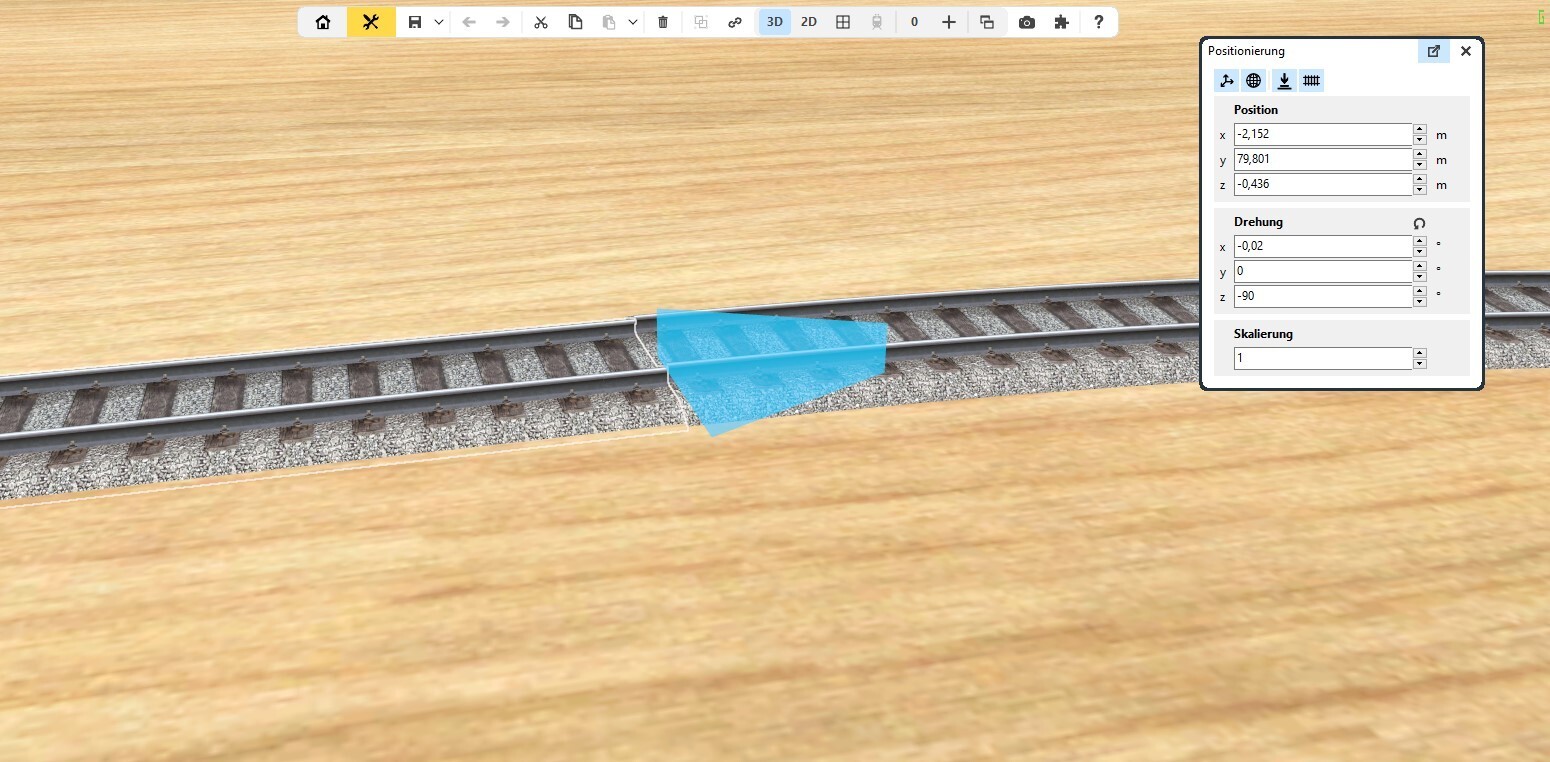
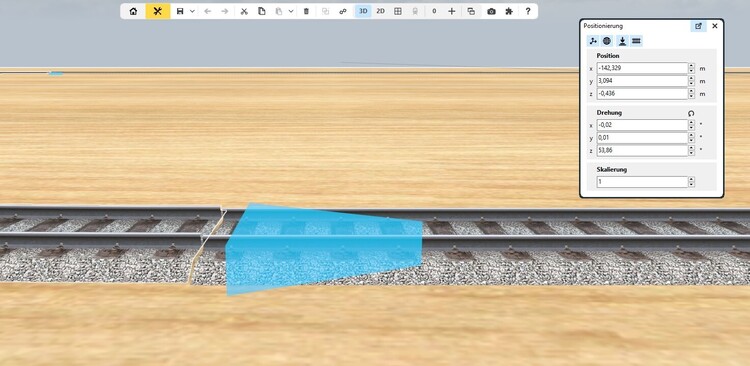
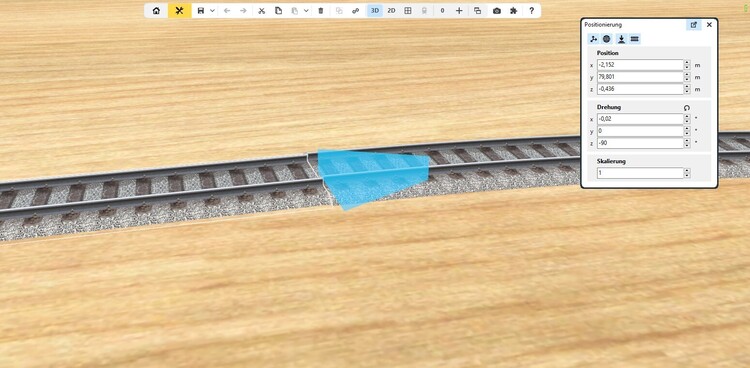
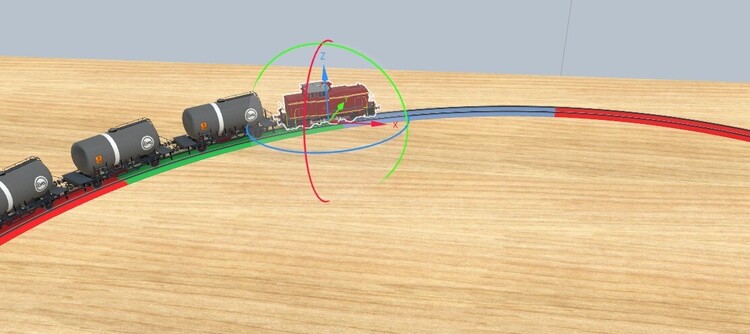
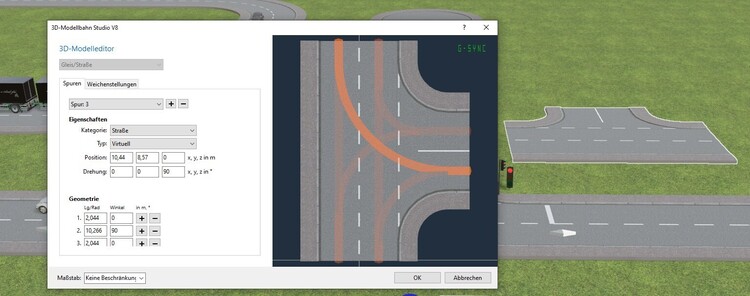
@Phrontistes, was Wolfgang schon schreibt, hier auch mit Bildern belegt. unter Drehung sollten die x,y-Werte auf "0" stehen, wenn keine Verwindung vorhanden ist. Das zu korrigieren, ist in deinen Kurven gar nicht so leicht. Bau die Strecke am besten neu, und traue dich, in den Kurven das eine oder andere Gleis zusätzlich einzubauen. VG, Hakweye
-
Hallo Wolfgang, das kenne ich auch noch. Es liegt daran, das ein Ziel im Fahrzeug zu früh gelöscht wird, bevor das Fahrzeug die Fahrspuren der Kreuzung komplett verlassen hat, oder erst gar kein Ziel im Fahrzeug vorhanden ist. Das sehe ich in deinem letzten Bild an der Position der „schwarzen“ Gleiskontakte. Das „Ausschlagen“ hängt mit der Reihenfolge der Spuren in einer Kreuzung oder einem Abzweig zusammen. Treffen sich an einer Stelle zwei Spuren und laufen in nur einer Spur weiter, dann wird das Fahrzeug inkl. Anhänger immer auf die niedriger definierte Spur katapultiert. Habe da schon mit vielen Spureinstellungen experimentiert, aber es gibt bei allen zu konstruierenden Spuren dabei leider immer eine niedriger Spur, so das es aus diesem Grund wenig Sinn macht, die Reihenfolge der Spuren zu verändern. Dafür gibt es aber mehrere Lösungen. Den Zielkontakt verschieben, so das das Fahrzeug in seiner Gesamtlänge die Kreuzung auch komplett verlassen hat. Oder das Ziel nicht beim „Betreten“, sondern beim „Verlassen“ löschen. Oder bei „Betreten (in Fahrzeugmitte)“ und eine kurze Verzögerung einbauen, so dass das Ziel erst nach 1-2 s gelöscht wird. Hauptsache das Fahrzeug hat die Kreuzung komplett verlassen, bevor das Ziel gelöscht wird. VG, Hawkeye
-
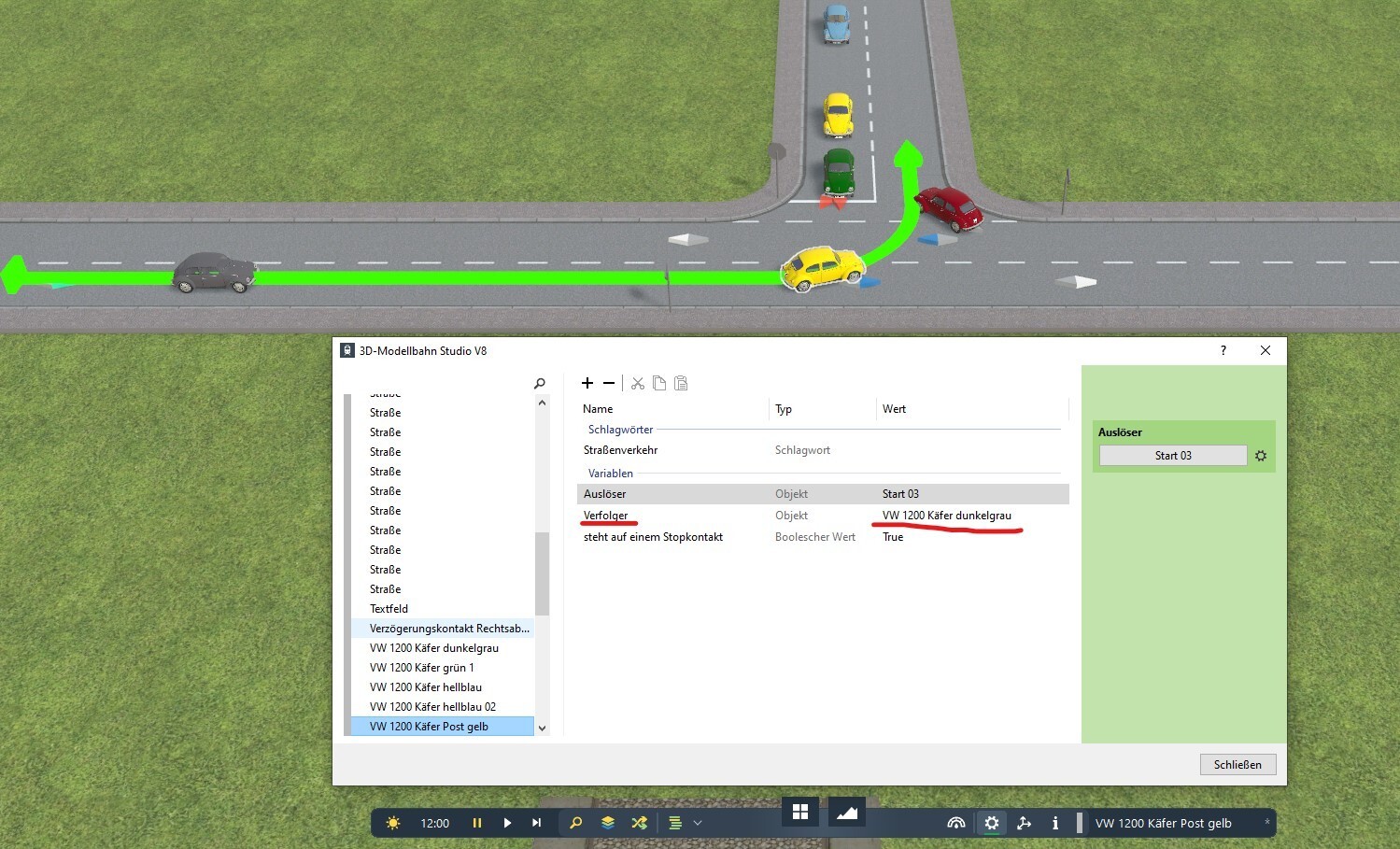
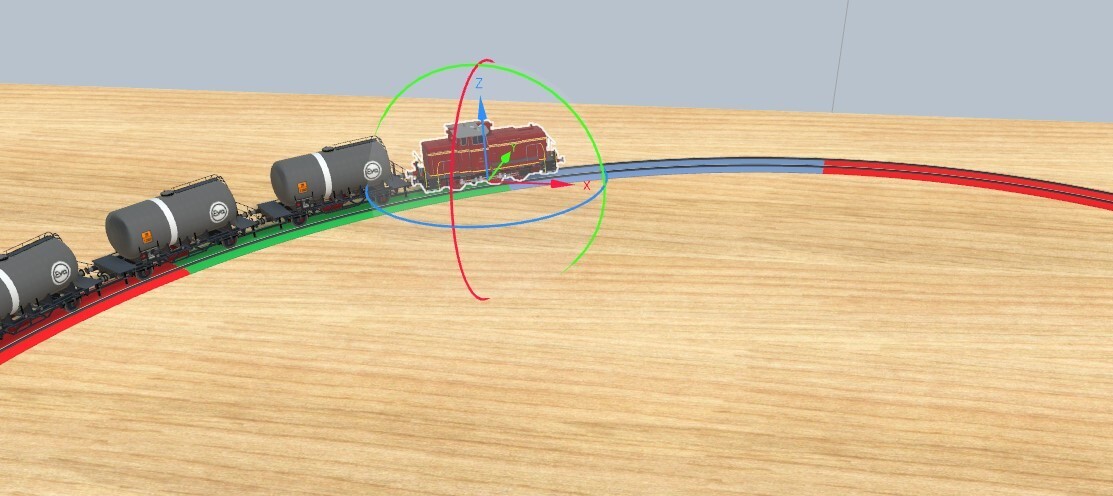
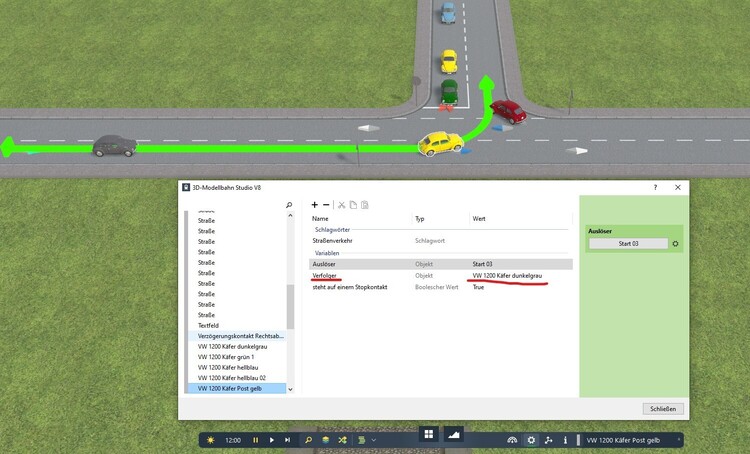
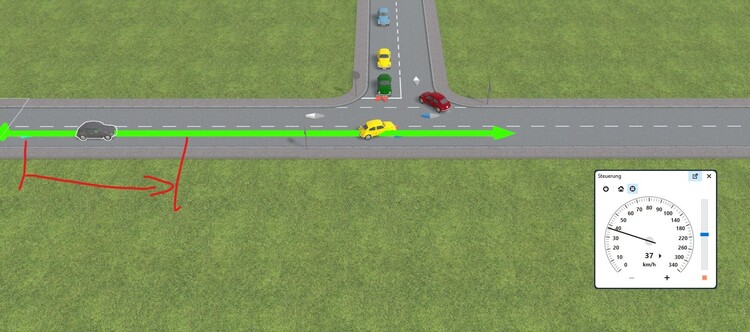
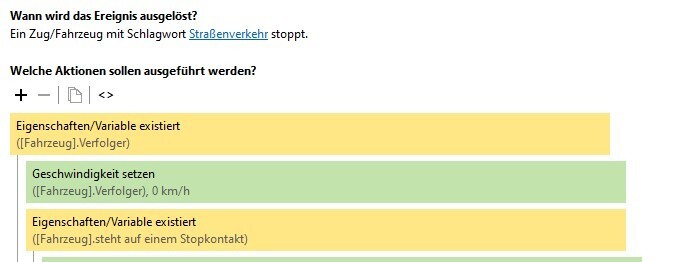
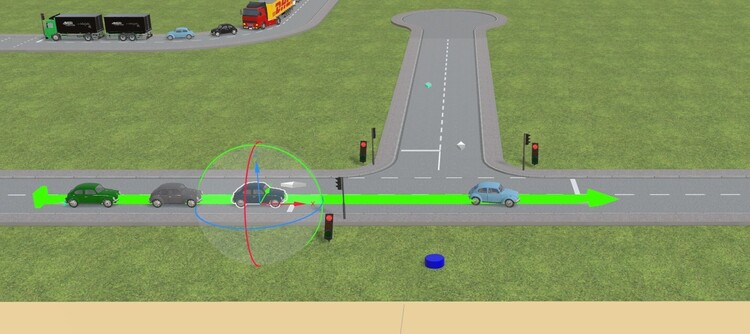
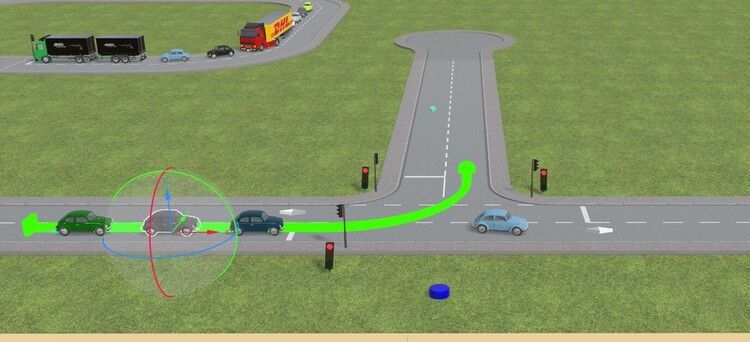
Hallo Wolfgang, das hatte ich ja auch mal ausprobiert. Aber mit ebenso unbefriedigenden Ergebnissen. Genau, deshalb verfolge ich jetzt ja auch einen neuen Ansatz. Der "dunkelgraue" PKW fährt geradeaus. Der gelbe PKW biegt ab und hält am Stoppkontakt. Am auslösenden Startkontakt (Start 03) = Anfang des grünen Fahrweges wird dem gelben PKW der Verfolger (dunkelgraue PKW) zugwiesen, wenn dieser den Kontakt betritt. Der Kontakt merkt sich also das letzte Fahrzeug, das ihn betreten hat. Stoppt der vorausfahrende (gelbe) PKW, dann wird synchron auch der Verfolger (dunkelgraue) gestoppt. Vorteil: solange der Abstand zwischen den Fahrzeugen moderat ist, sieht es gut aus. Nachteil: Hat der gelbe PKW schon gestoppt, wenn der Verfolger den Startkontakt betritt, dann bremst der Verfolger viel zu früh ab. Dies Lücke lässt sich schließen, wenn man den Abstand zum gelben Fahrzeug ermitteln kann. Lücke = Distanz zum Stoppkontakt - Länge des vorausfahrenden (hier: gelben) Fahrzeugs incl. Anhänger (= Fahrzeugverband) - Halteabstand von ca. 2-3m Je nach Abstand kann man dann entweder eine geringer Bremsverzögerung einstellen, oder eine zeitliche Verzögerung, bis das Verfolgerfahrzeug hinter dem (gelben) Fahrzeug hält. VG, Hawkeye

-
Hallo Neo, es reicht doch auch, wenn die Strecke zum Zeitpunkt der Zielzuweisung gelesen werden kann. Auslöser in der EV ist doch immer ein Gleiskontakt, der von einem Fahrzeug betreten wird. Verschiebe ich jetzt den Gleiskontakt beim Testen um ein Delta (+/-), dann wird mir auch beim Betreten des Gleiskontaktes durch ein Fahrzeug an dieser neuen Stelle die aktualisierte Strecke angegeben, ohne das ich die Strecke von Hand neu ausmessen muß. Das habe ich mit „dynamisch“ gemeint. VG, Hawkeye
-
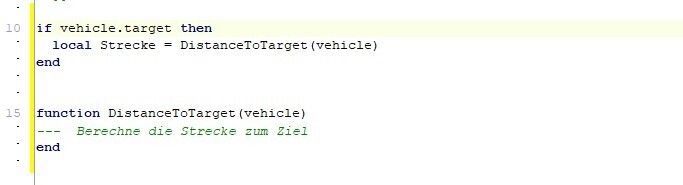
Hallo Neo, durch diese Diskussion ist mir etwas klar geworden. Eine Fahrstraße (orange) wird bildet zwischen zwei Gleiskontakten. Ein Fahrweg wird gebildet zwischen einem Fahrzeug (Zentrum) und einem Gleiskontakt (Target) . Genau diese (grüne) Strecke von Fahrzeug zum Target möchte ich ermitteln. Da habe ich mich wohl etwas unverständlich ausgedrückt. Die grüne Strecke als Distanz vom Fahrzeug zum Ziel existiert doch im Programm! Eine Funktion könnte doch so aussehen. VG, Hawkeye
-
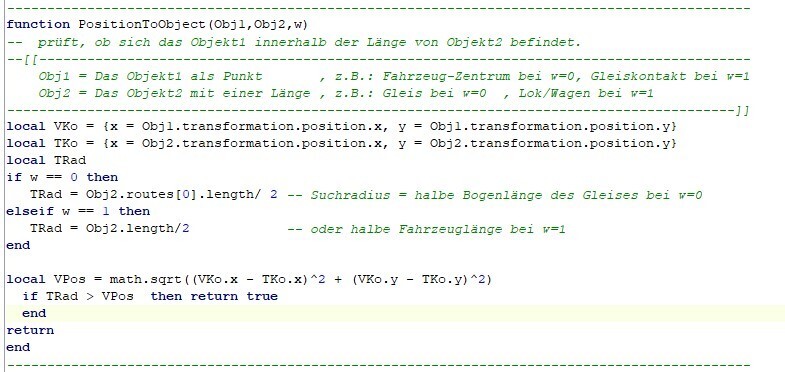
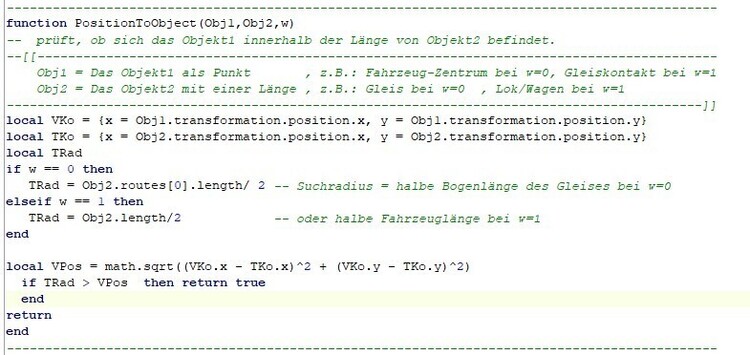
Hallo @Phrontistes, danke für den Tip. Das Plugin selber hilft natürlich nicht. Aber dieser Satz hat mich an meine eigenen (schon vergessenen) Experimente erinnert. Ich habe eine solch ähnliche Funktion in einem anderen Zusammenhang in Lua schon mal selbst geschrieben. Dabei ging es u.a. darum, wo genau sich das Zentrum (Koordinatenmittelpunkt) einer Lok in Bezug zum Gleis befindet, auf dem sie steht. Werde diese Funktion entsprechend anpassen und mir die benötigte daraus selbst erzeugen. also ganz "Easy". VG, Hawkeye
-
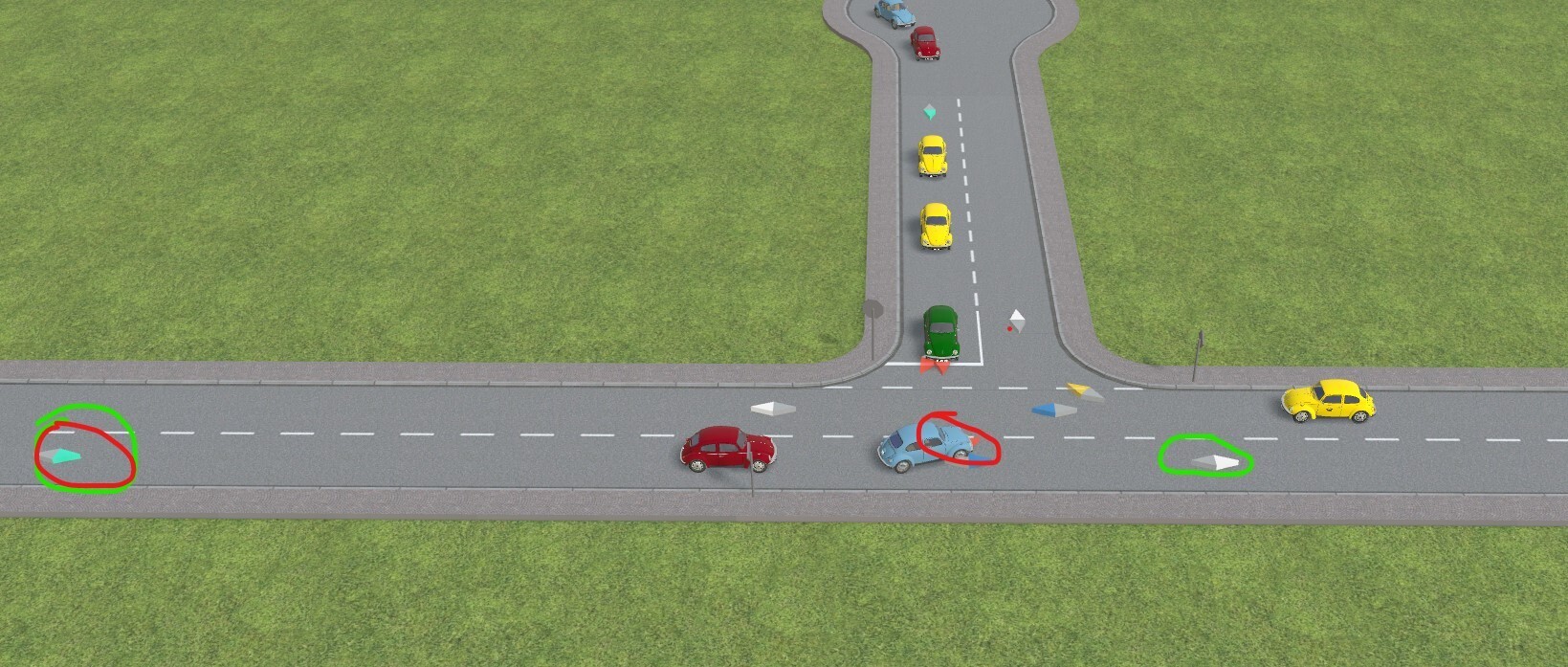
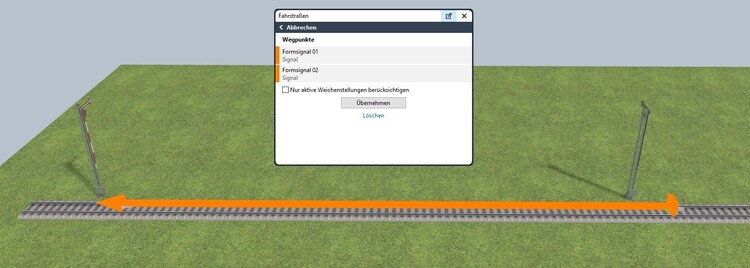
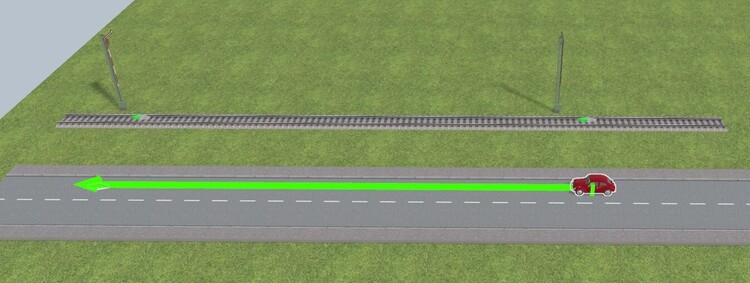
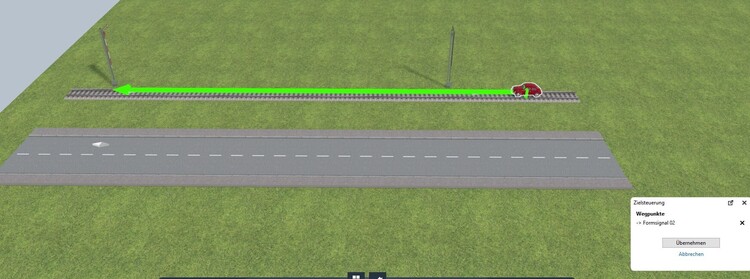
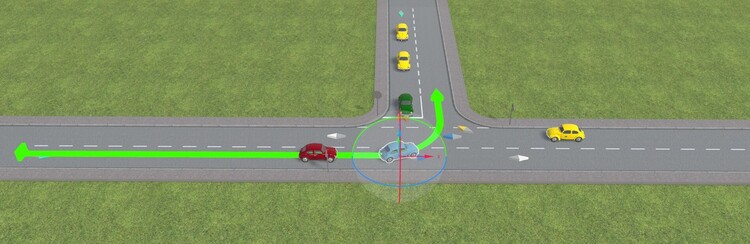
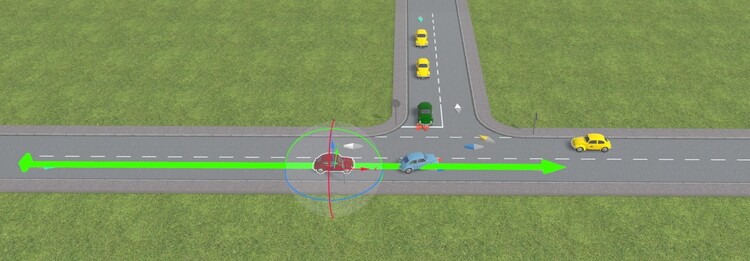
Hallo @Neo, ich komme nochmal zurück auf meine Anfrage vom Frühjahr letzten Jahres. Ich stoße bei meinen Experimenten immer auf das gleiche Problem. Ich benötige den Abstand zwischen zwei Gleiskontakten als Strecke [m]. Momentan beschäftige ich mich (mal wieder ) mit dem unsäglichen Problem des "durch den Vordermann hindurchfahren" von Fahrzeugen im Straßenverkehr, wenn sie unterschiedliche Wege an Kreuzungen oder Abzweigen einschlagen. Eine statische Lösung durch Vermessen der Strecke habe ich gefunden. Um das Ganze aber abzurunden und für beliebige Strecken oder verschobenen Gleiskontakte zu optimieren, benötige ich den Abstand zweier beliebiger Gleiskontakte, bzw. die Länge der fahrbaren Strecke, wie in den Bildern oben dargestellt, z.B. die Fahrstrecke zwischen 2 Wegpunkten. In meinem aktuellen Experiment vom GK "türkis oder cyan" zum "roten" Stoppkontakt. Lässt sich das nicht doch irgendwie einrichten, das man diese Information per Lua abgreifen kann? VG, Hawkeye
-
Hallo Wolfgang, fehlt da auf der linken Seite nicht noch ein Signal? 🤔 Der Lokführer sollte schon wissen, ob er geradeaus fährt oder (nach rechts) abbiegt. 😉 VG, Hawkeye
-
Hallo @UBahn, wenn du in der EV eine Bedingung erstellst, dann steht da auch „Eine weitere Bedingung hinzufügen“. Wenn du das machst, ergibt das deine gesuchte „Mehrfache Bedingung“. VG, Hawkeye
-
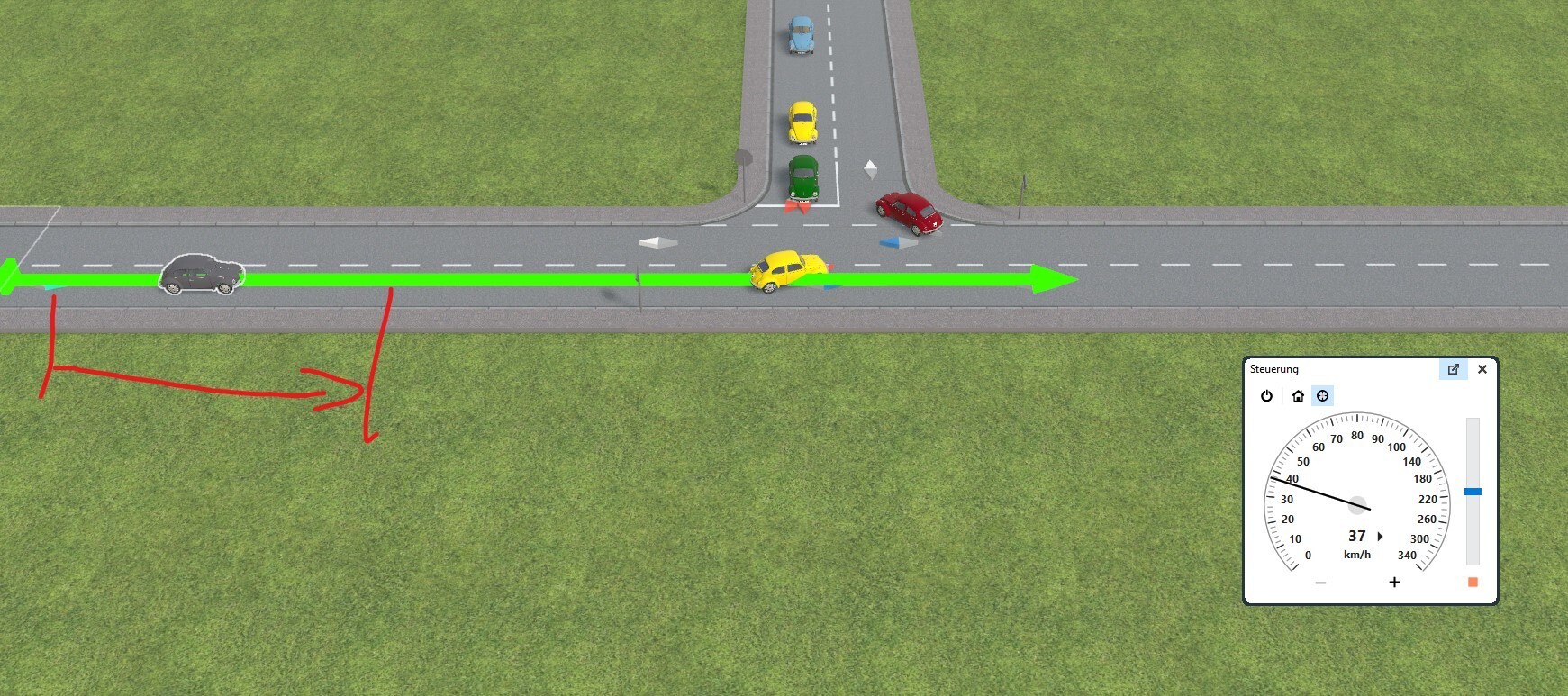
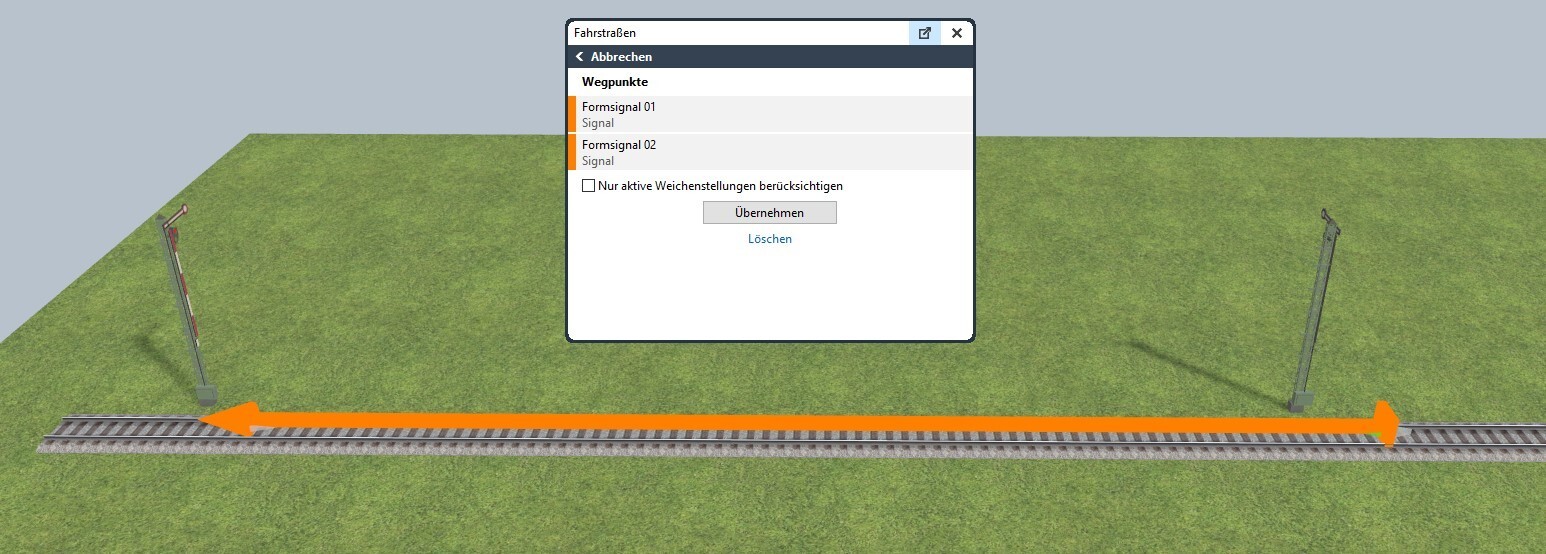
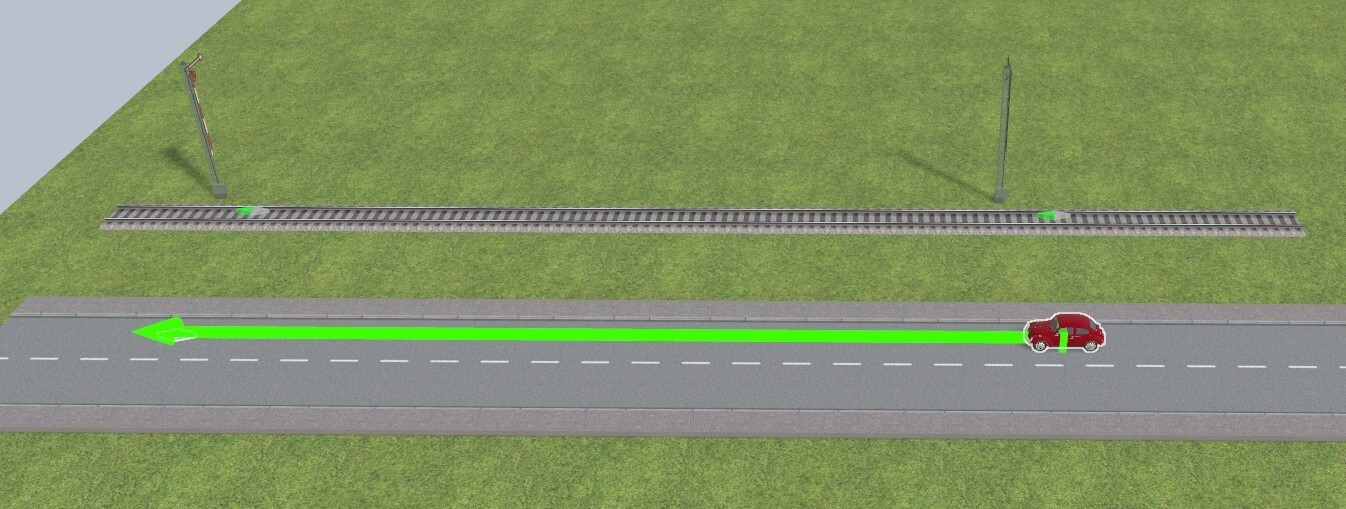
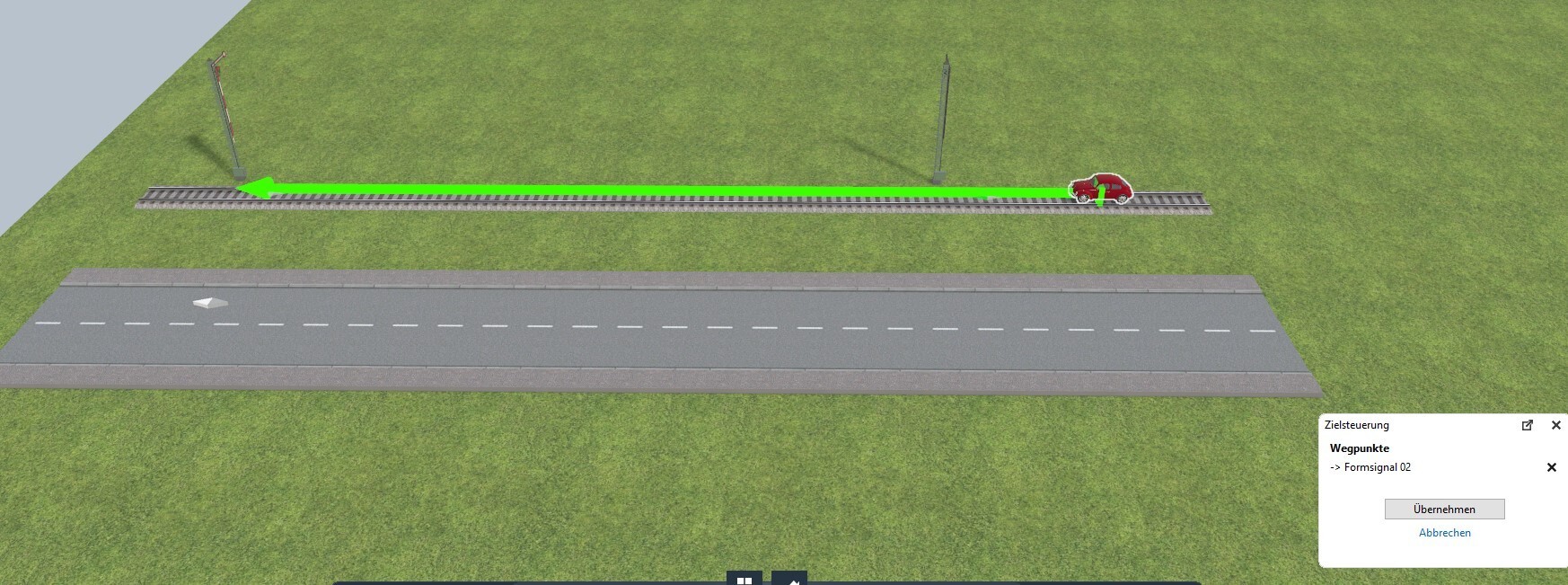
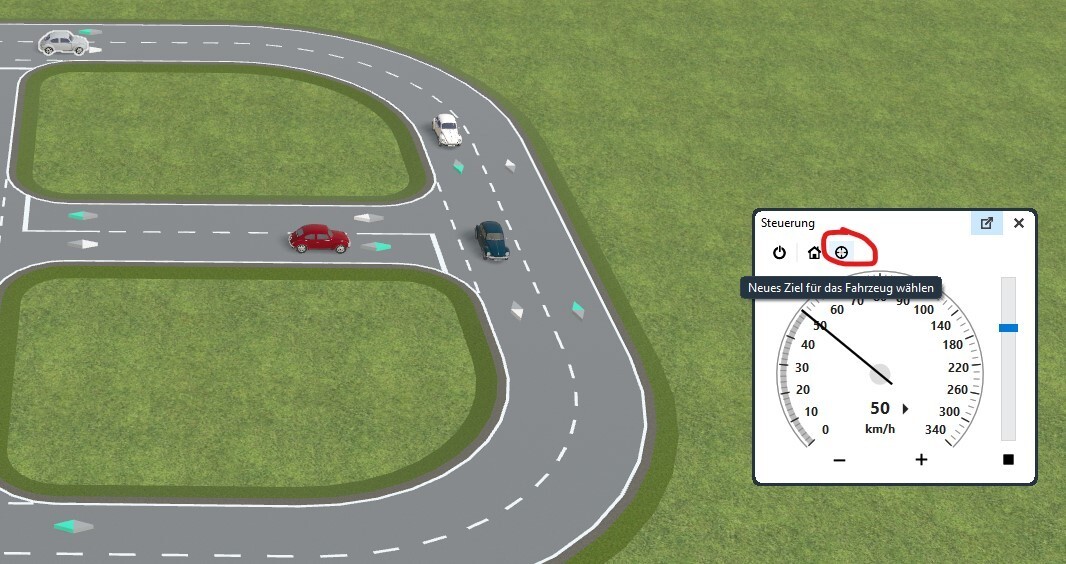
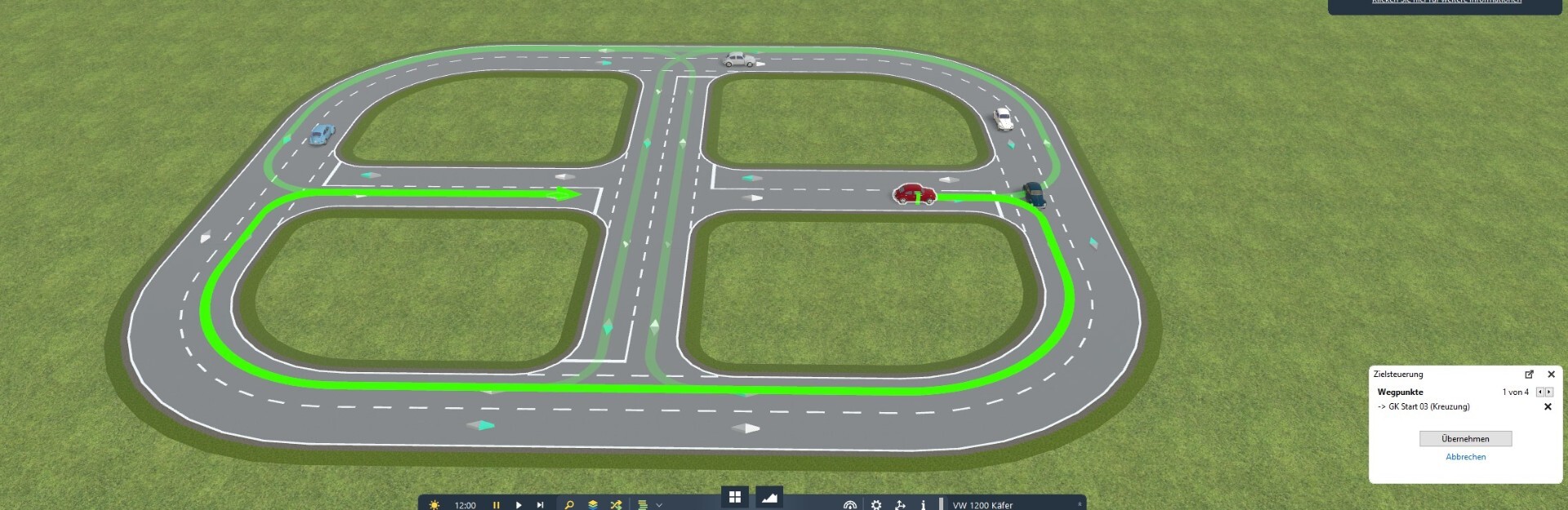
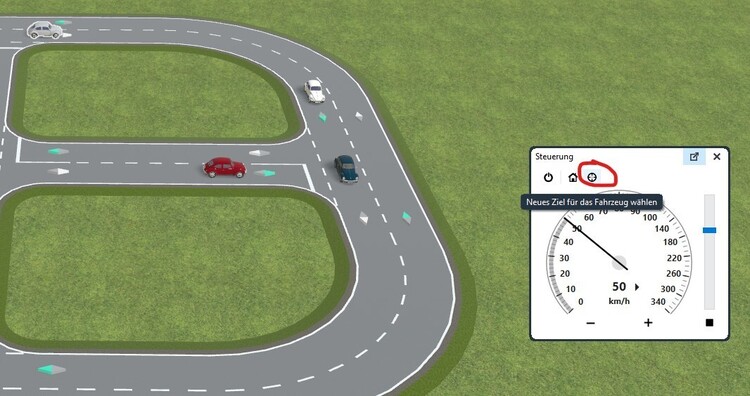
Hallo @Phrontistes, über die Wegpunkte kannst du einem Fahrzeug auch manuell Ziele zuweisen. Findest du in dem Fenster "Steuerung". Da werden dir verschiedene Wege zum gewünschten Ziel angezeigt, wenn du auf eine Gleiskontakt klickst. Es wird letztlich die Strecke gefahren, die "leuchtend grün" eingestellt ist. VG, Hawkeye


-
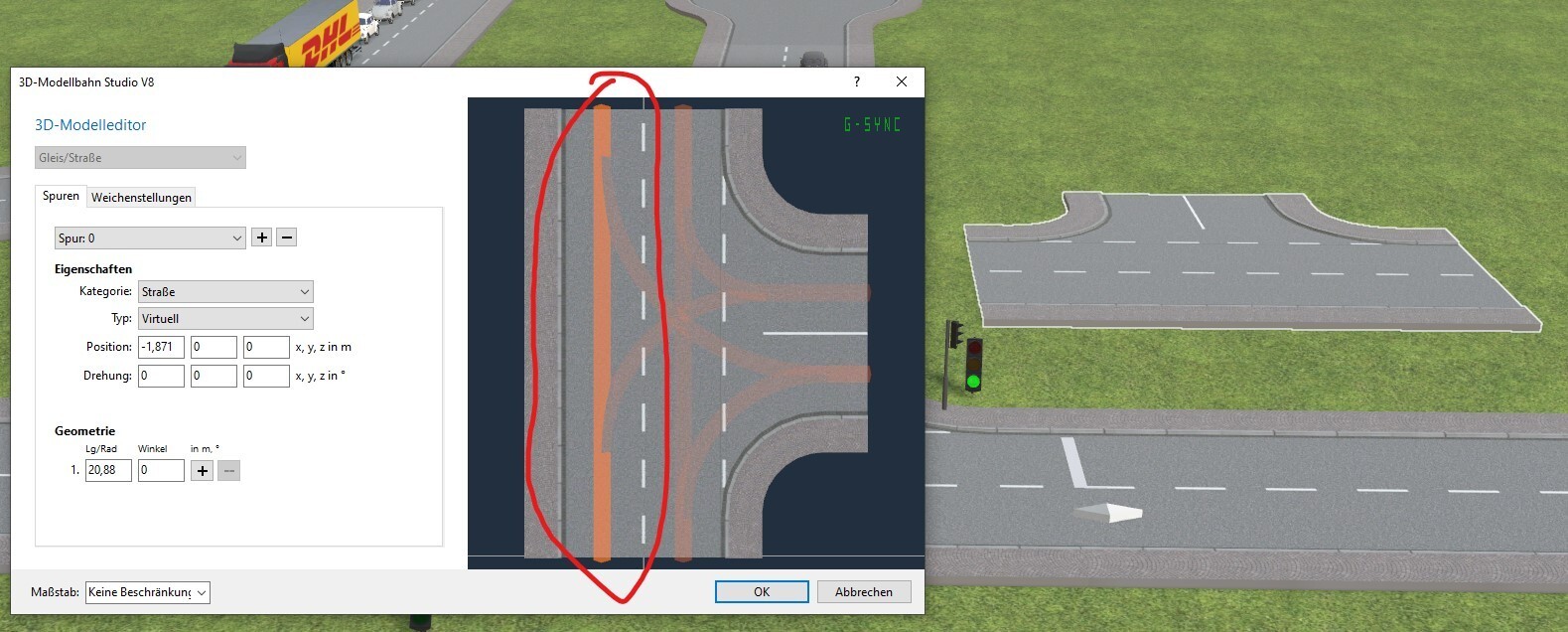
Wenn du „blaßrot“ meinst, dann sind das bei Straßen virtuelle Fahrspuren. Die solltest du nicht ignorieren.
-
Hast ja recht. Der Fehler liegt immer an den falschen Annahmen oder Erwartungen, mit denen man auf die Fehlersuche oder selbst bei der eigentlichen Programmierung geht. Und wieder etwas gelernt: Wenn etwas nicht funktioniert, dann stelle auch deine Erwartungen in Frage. 😁
-
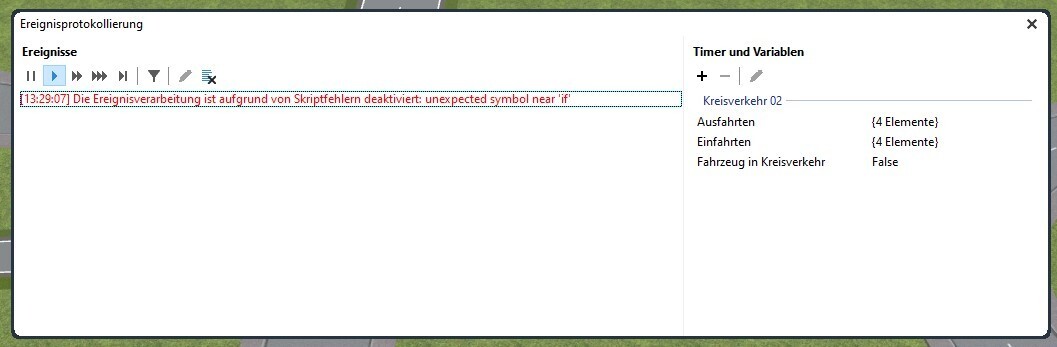
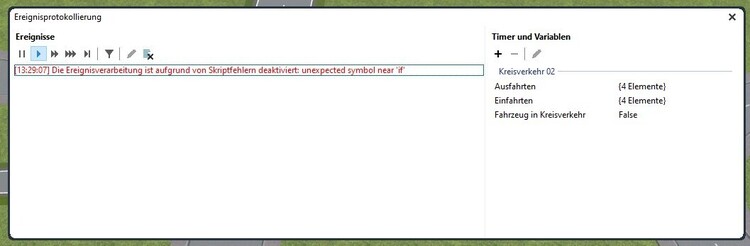
„Gewöhnlich“, richtig. Kannte ich bisher auch so. In diesem Fall gab es diesen Hinweis an das fehlerhafte Ereignis aber nicht. Wahrscheinlich aus dem Grund, das es eben „inaktiv“ war.
-
Hallo @Sintbert, Danke, das weiß ich auch. Das sehe ich anders. Wenn ein Fehler in einem Skript vorhanden ist, dann sollte er in einem aktiven Ereignis auftreten. Ein Fehler in einem „inaktiven“ Ereignis erschwert die Suche unnötig.
-
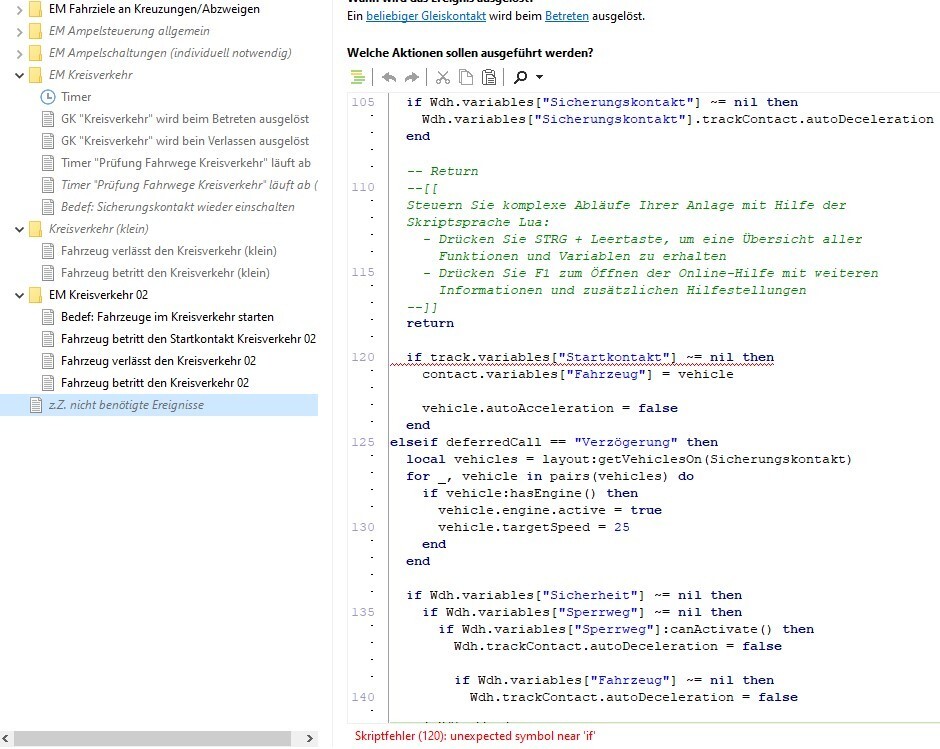
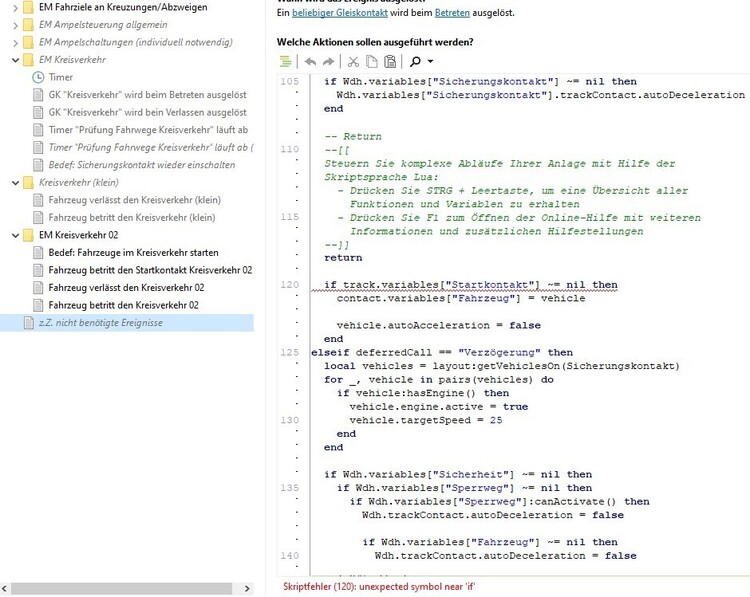
Hallo @Neo , ich habe diese Fehlermeldung im Ereignisprotokoll bekommen. Bei der Suche nach dem Fehler bin ich fast verzweifelt. Gefunden habe ich ihn letztendlich in einem "inaktiven" Ereignis. !!!!!!!!! Ich bin eigentlich davon ausgegangen, das "inaktive" Ereignisse bei der Ausführung nicht berücksichtigt werden. Genau deshalb deaktiviere ich sie ja auch! VG, Hawkeye
-
Die Abkürzung WQHD steht für Wide Quad High Definition und beschreibt eine Auflösung von 2.560 x 1.440 Pixeln.
-
Danke, aber das weiß ich auch.🙄 Wenn es denn funktionieren würde. Habe erst vor kurzem einen neuen Monitor mit hoher Auflösung (WQHD) bekommen. Vorher mit dem alten Monitor bei Full HD-Auflösung ist mir das nicht aufgefallen. VG, Hawkeye
-
Hallo @LokoKlaus, musst du nicht unbedingt. Wenn die Autos „zufällig“ eine Richtung wählen sollen, dann kannst du das mit Gleiskontakten an den Kreuzungen über die EV steuern. VG, Hawkeye
-
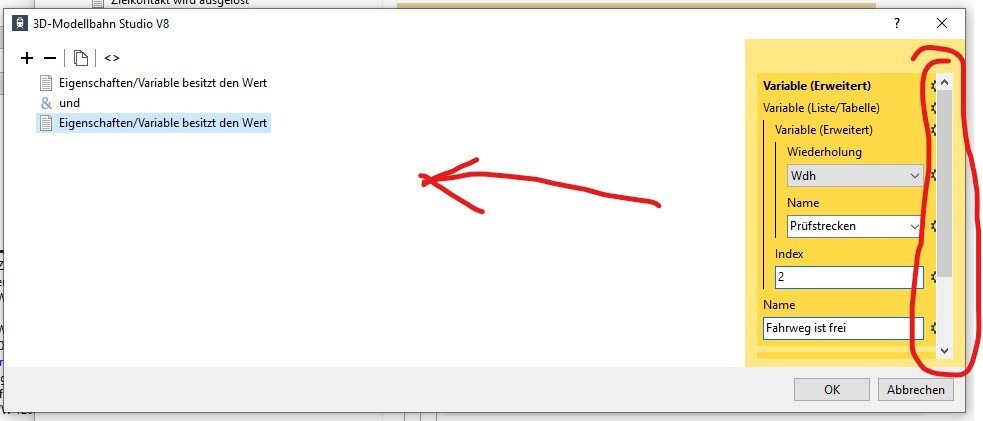
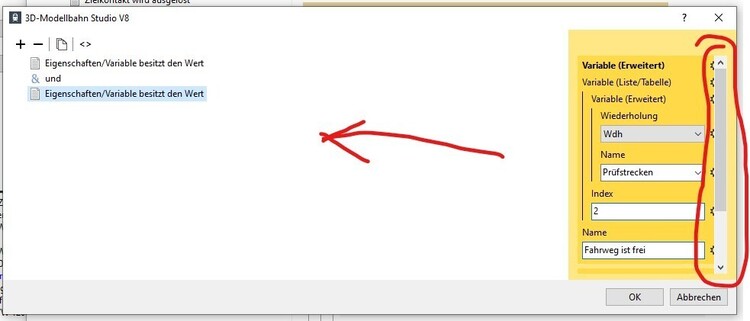
Hallo @Neo, Kann der gelbe Bereich etwas vergrößert werden ? Man kommt in bestimmten Fällen, z.b. bei mehrfach Verschachtelungen, kaum an die Schaltflächen heran. VG, Hawkeye
-
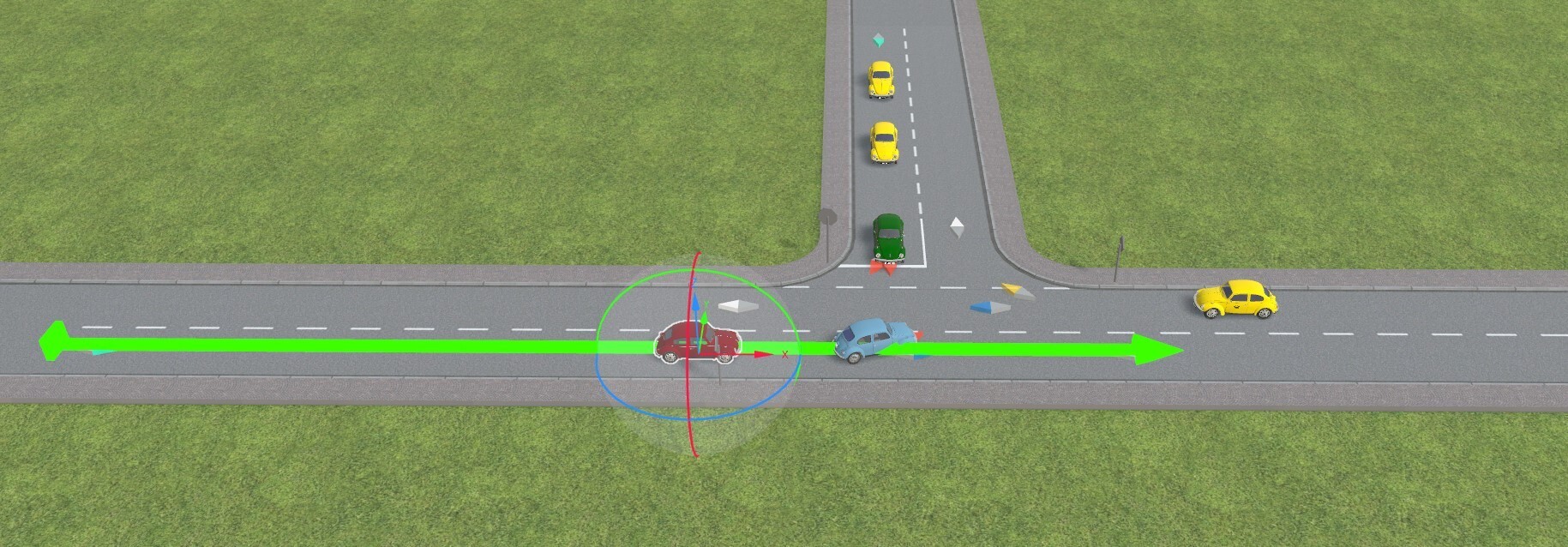
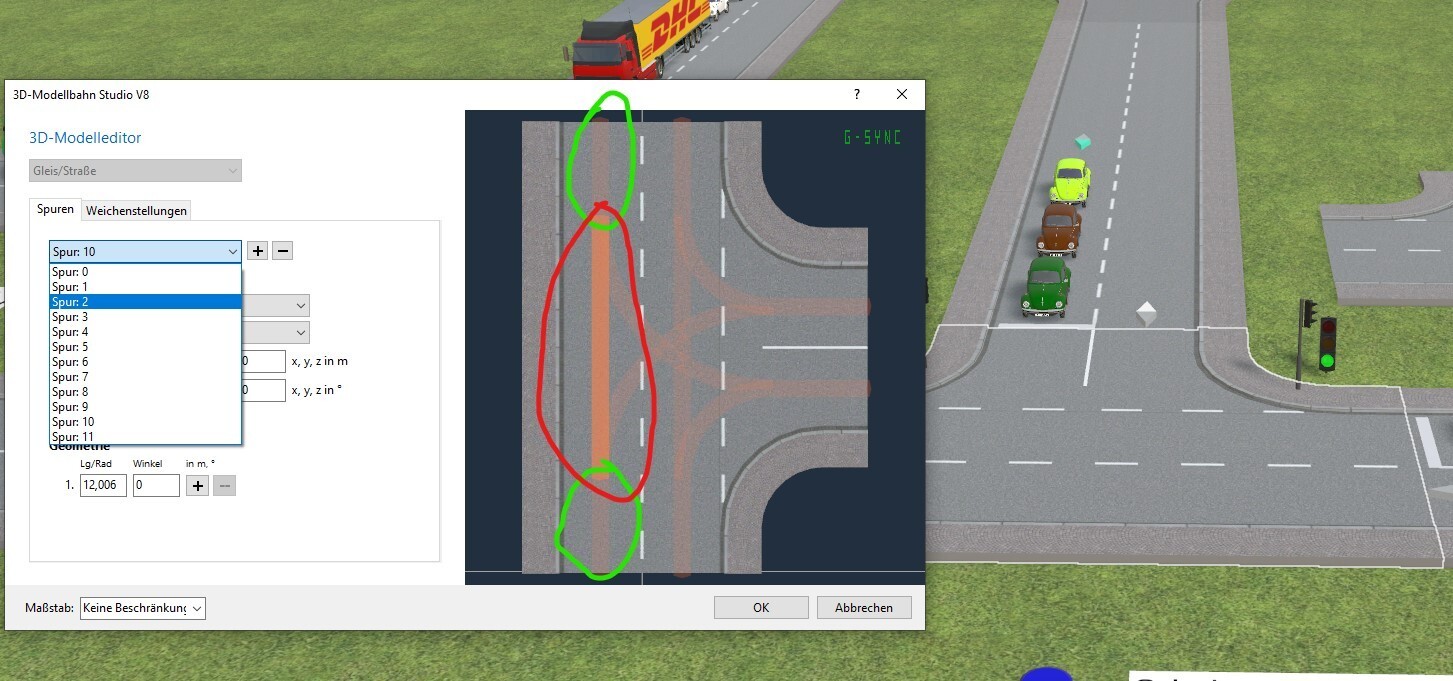
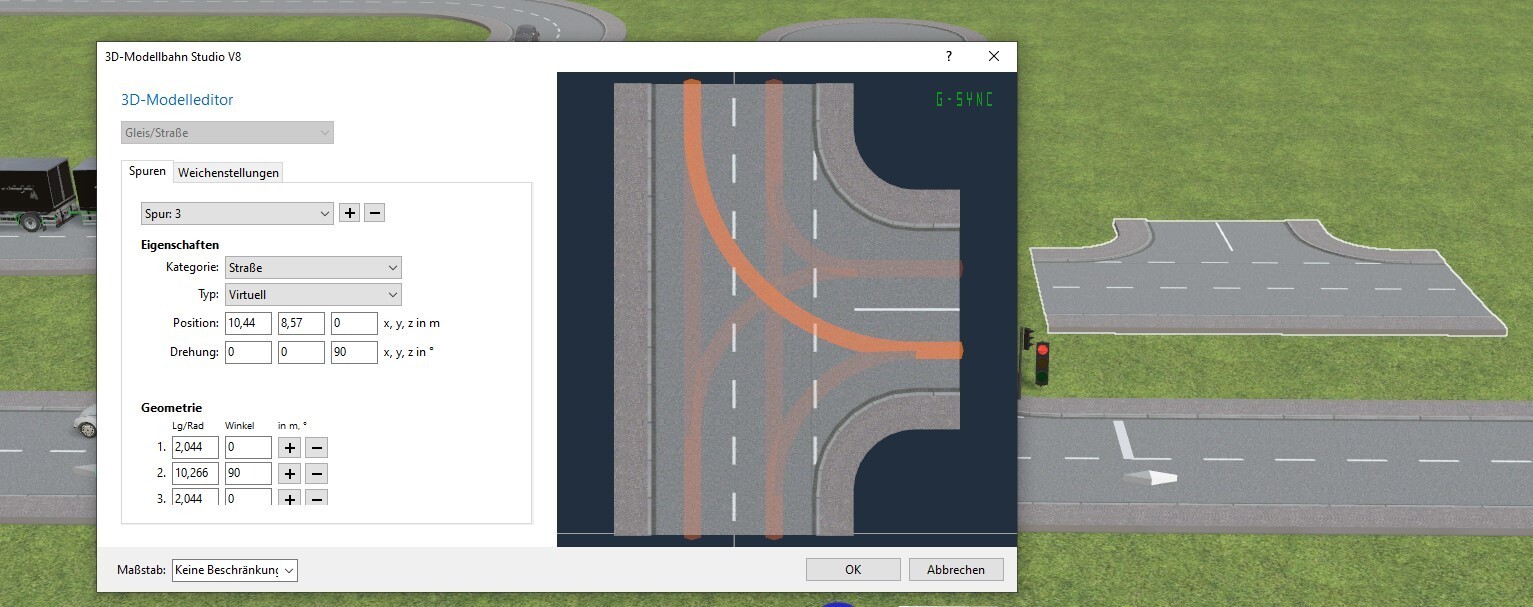
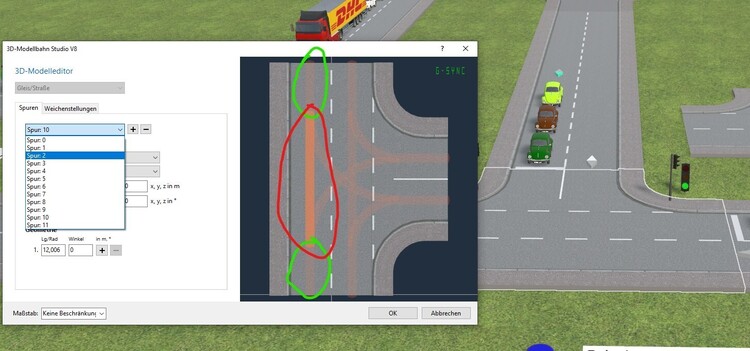
Jupp, gefunden! Es liegt an der Definition der Spuren des Abzweigs. Das ist der Abzweig, so wie er im Katalog definiert ist. Die geraden Spuren sind über die Länge durchgezogen. Und die abzweigende Strecke beginnt ebenfalls am Straßenende. Ich habe das mal auf eine 3-teilung geändert : Dadurch bricht der Kontakt zum Vordermann beim Beschleunigen aus dem Stand auch um die grüne Strecke später ab. Das ergibt einen wesentlich flüssigeres "Anfahren" der Fahrzeuge aus dem Stand. (Kleine Ursache, aber große Wirkung! ) VG, Hawkeye

-
Hallo @Phrontistes, danke für die Idee, sie hilft aber nicht. Die Richtung, wo die Fahrzeuge hinmöchten ist doch schon an der „roten“ Ampel bekannt und löst das beschriebene Problem nicht. Ich habe aber schon einen Verdacht, woran das „zu frühe“ Abreißen des Kontaktes zum Vordermann liegen kann. 😉 VG, Hawkeye
-
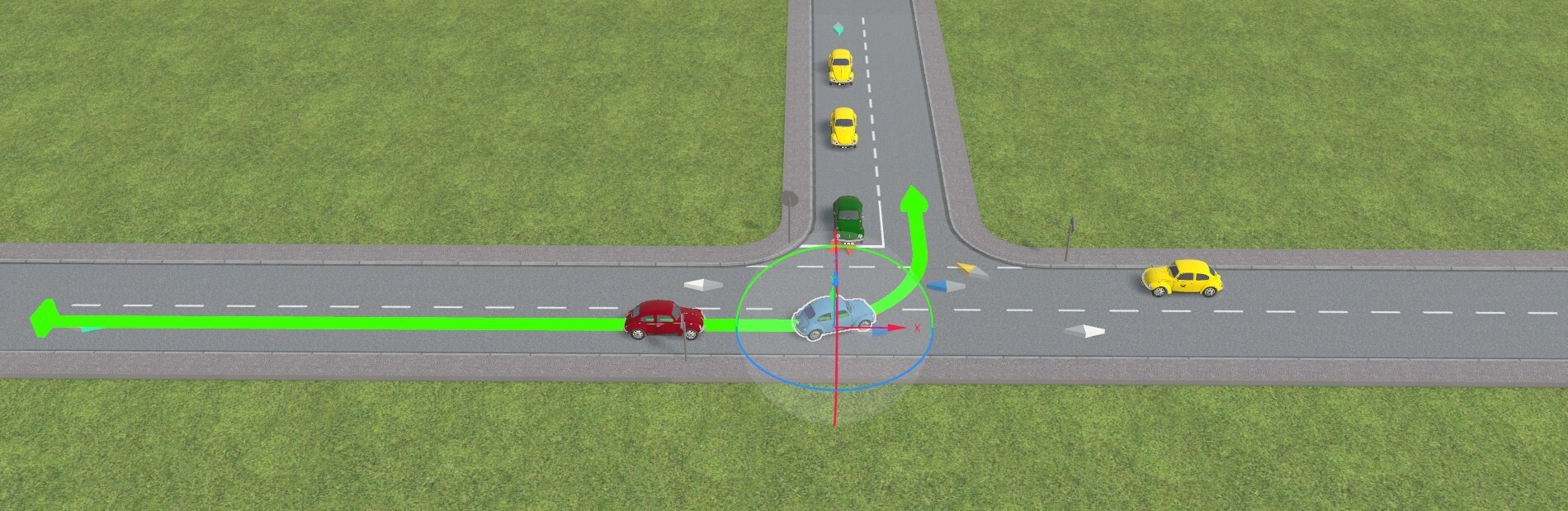
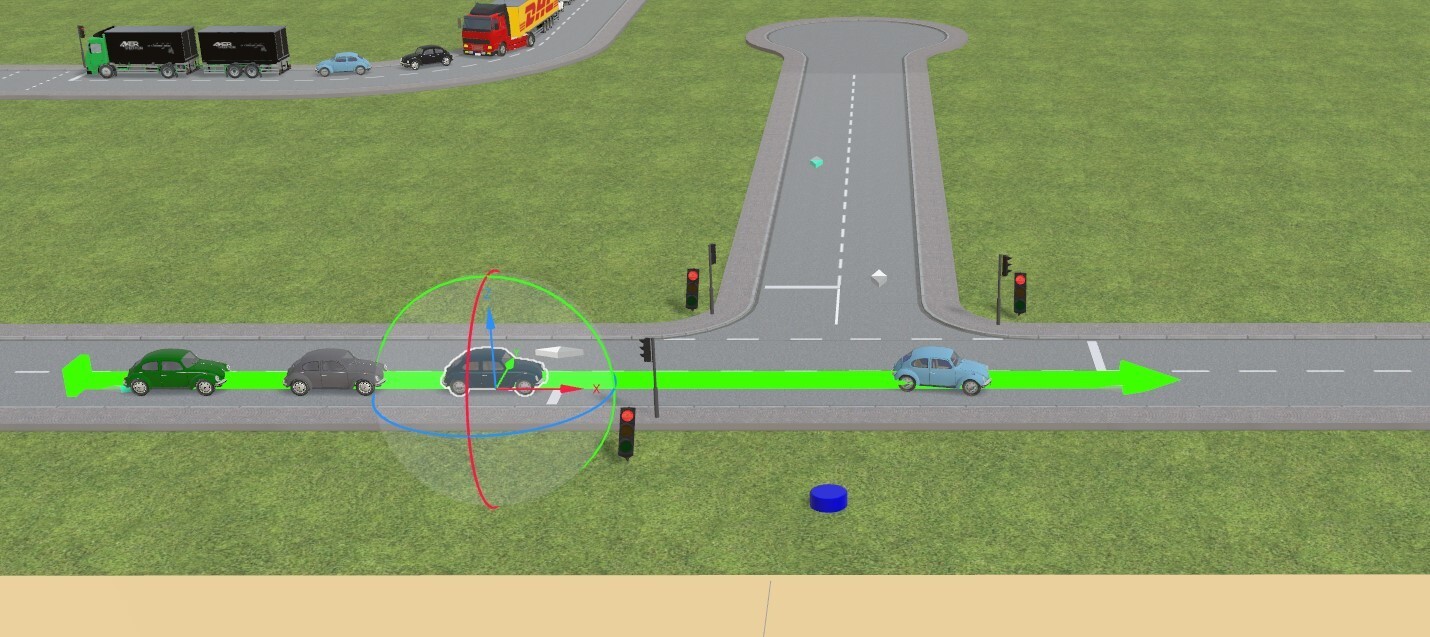
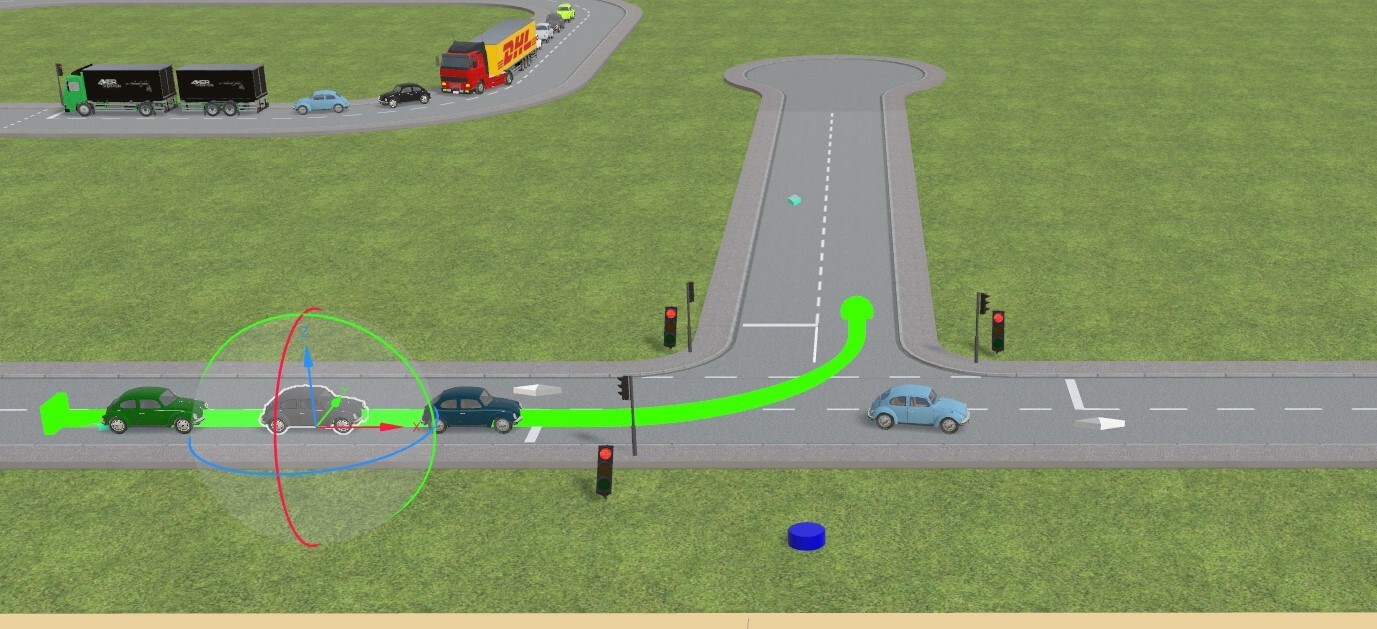
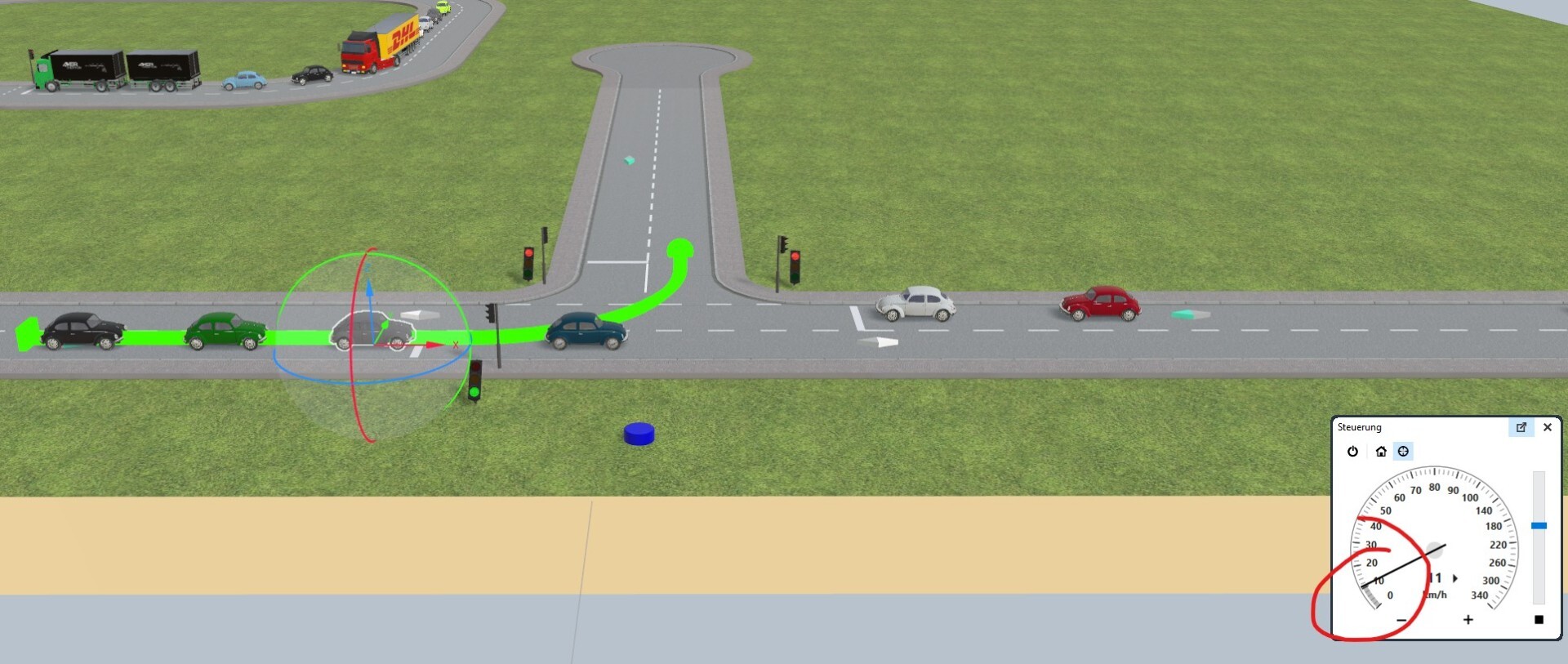
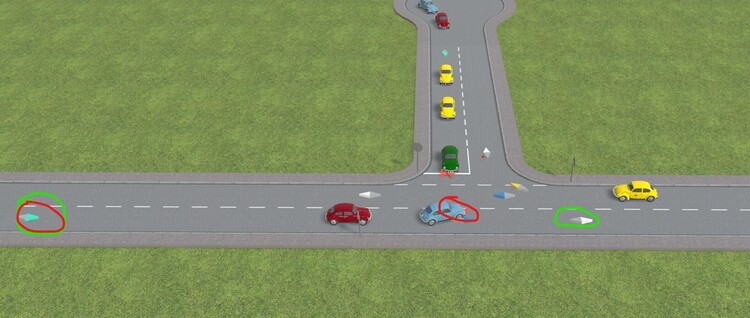
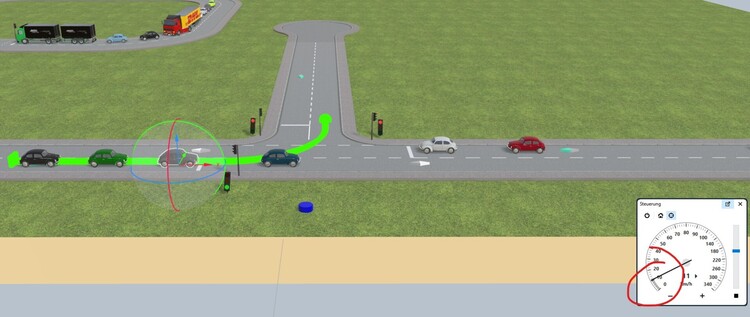
Danke @Goetz Hier mal die Erweiterung der Steuerung auf einen T-Abzweig. Ampelsteuerung über Bremsweg 01.mbp Da denkt man endlich einen flüssigen Ablauf erreicht zu haben, da tauchen wieder andere neue Probleme auf. Shit happens! Das neue Problem offenbart sich in der Tatsache, das durch die jetzt unterschiedlichen Richtungen, in die die Fahrzeuge zufällig fahren können, die "automatische Beschleunigung" gerade beim Anfahren recht wirkungslos ist. Der Kontakt zum Vordermann reißt sofort ab, wenn zwei Fahrzeuge, die hintereinander fahren unterschiedliche Richtungen einschlagen. Hier schön zu sehen, das der dunkelgraue Käfer gerade mal auf 10 km/h beschleunigt hat und dann der Beschleunigungsvorgang unterbrochen wird, da der dunkelblaue Käfer geradeaus fährt. Da muss man schon tief in die Trickkiste greifen, um einen einigermaßen flüssigen Ablauf beim Anfahren an der Ampel hinzubekommen. Ganz lässt sich das aber wohl nicht abstellen. Auch nicht mit vielen Gleiskontakten. Mein Ziel ist ja auch, Gleiskontakte auf ein Minimum zu reduzieren, damit es übersichtlich bleibt. VG, Hawkeye
-
Hallo @Goetz, ich habe diese Steuerung über den Bremsweg mal auf einen T-Abzweig erweitert. Für die reine Ampelschaltung habe ich dein schönes Beispiel unter Tutorials adaptiert. Ist das o.k. für dich, wenn ich das verwende? VG, Hawkeye