Hawkeye
Mitglieder
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Hawkeye
-
Danke, @Goetz Meine Grundregel: Setze nie einen Gleiskontakt auf die Schnittstelle von Gleisen. (Zumindest bei GK für Fahrstraßen!) VG, Hawkeye
-
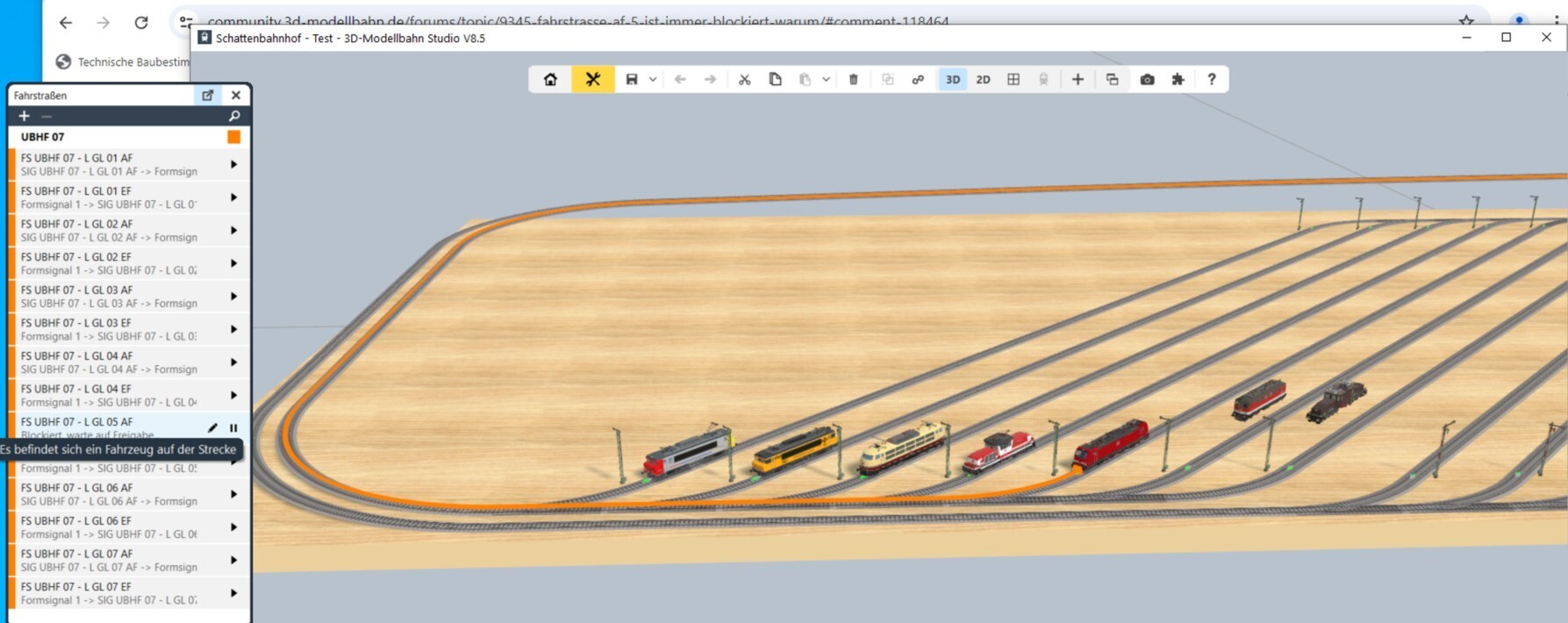
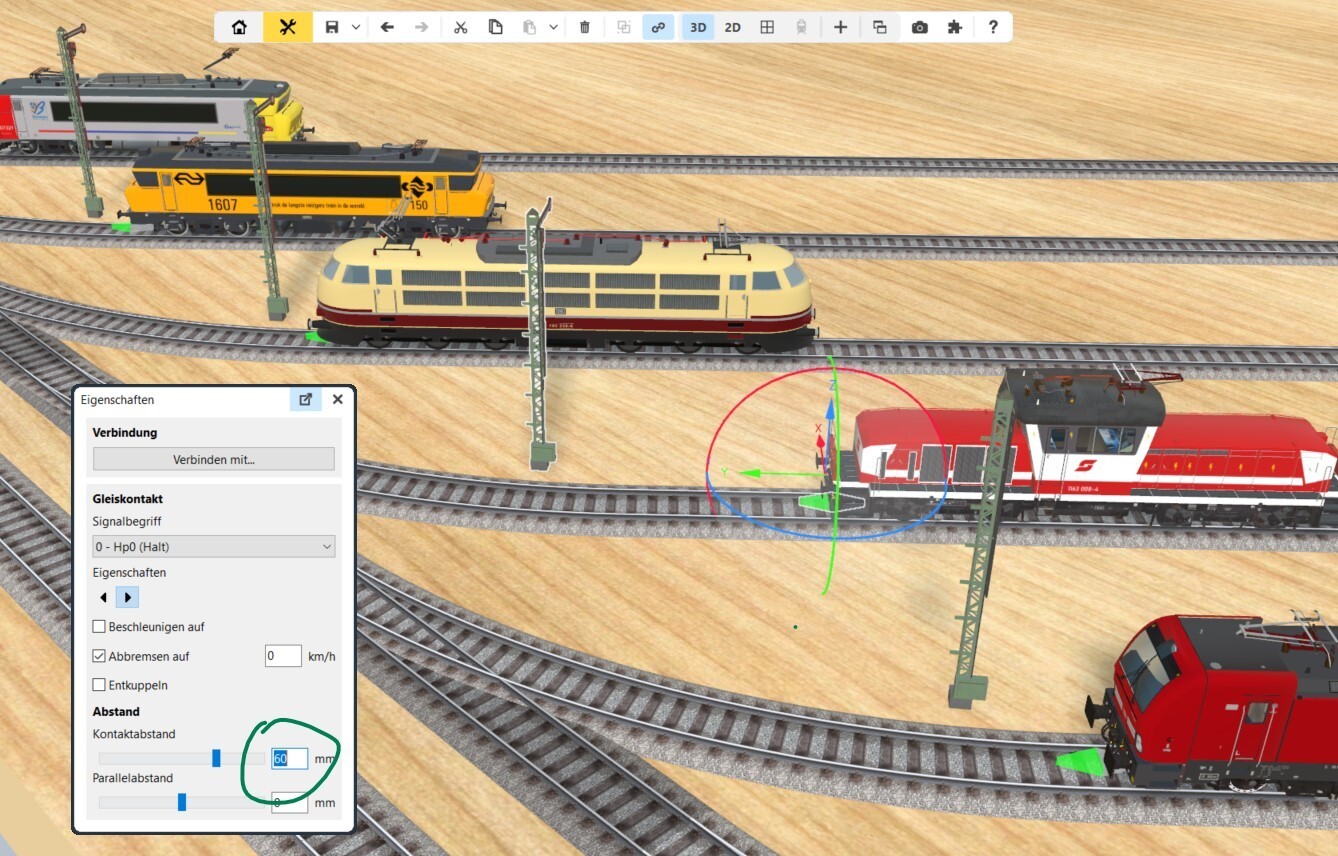
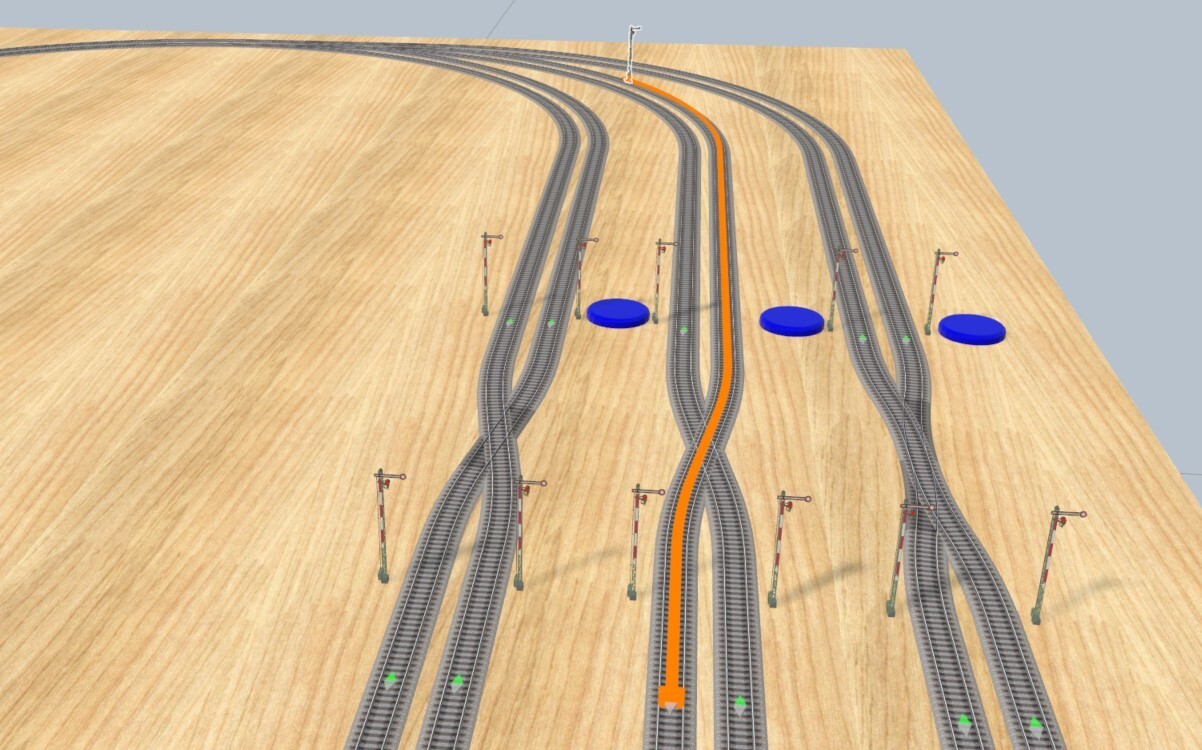
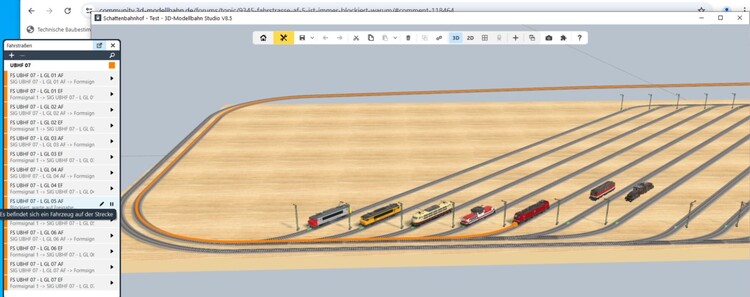
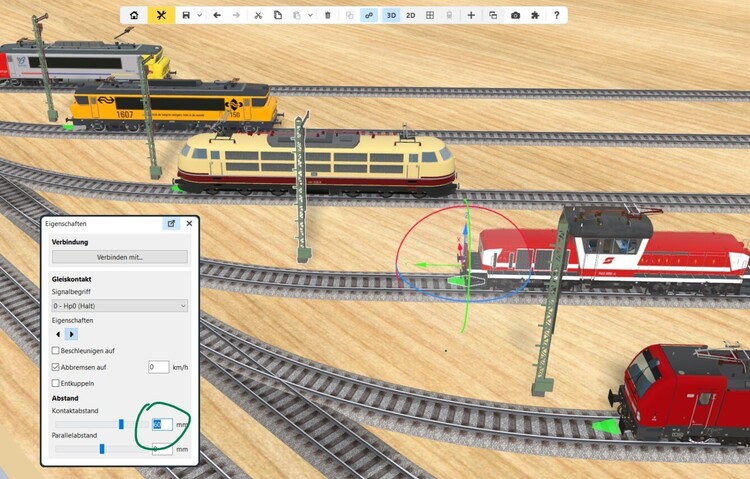
Hhallo @dahn.swiss, Die Meldung dazu lautet: "Es befindet sich ein Fahrzeug auf der Strecke" Das ist auf den ersten Blick aber nicht zu erkennen. Für die Weichen und die Positionen der Signal-Gleiskontakte hast du aber eine ungünstige Konstellation gewählt. Einige der wartenden Loks vor den ersten 4 Signalen stehen auf den Weichen. Dies wird vom Programm so erkannt, das auf den Weichen ein Fahrzeug steht und folglich die Weiche/ Fahrstraße nicht frei ist. Somit bleibt die Fahrstraße 5 blockiert und es erfolgt keine Freigabe. Setze die Gleiskontakte weiter zurück, so das die Loks nicht auf den Weichen zum Stehen kommen und baue die Fahrstraßen neu auf. Dann funktioniert es auch. Auch solltes du die Verzögerung nicht zu niedrig wählen, weil sonst die Loks über den Gleiskontakt hinausfahren, was ebenfalls dazu führen kann, das diese Meldung entsteht. Oder alternativ, die Loks vorher per GK auf eine niedrigere Geschwindigkeit abbremsen. VG, Hawkeye

-
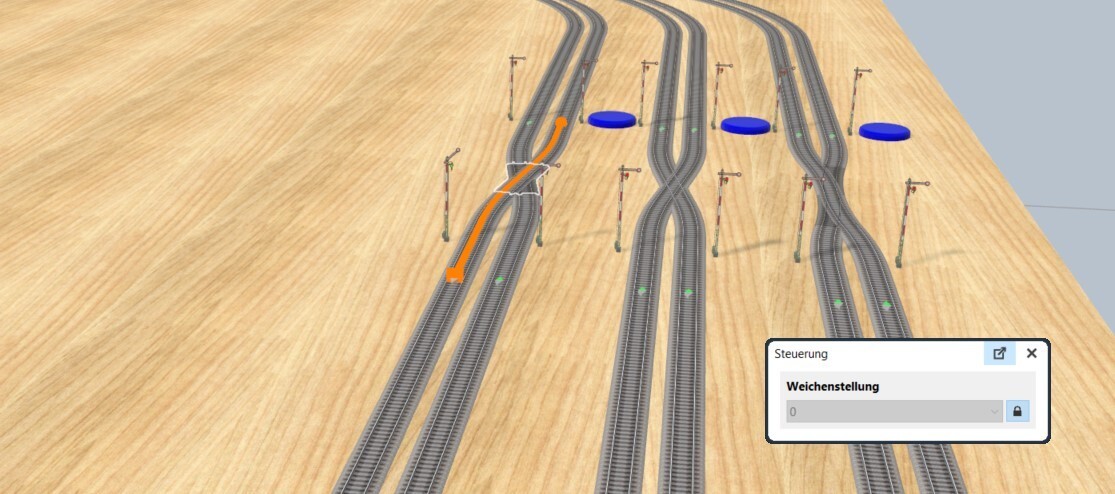
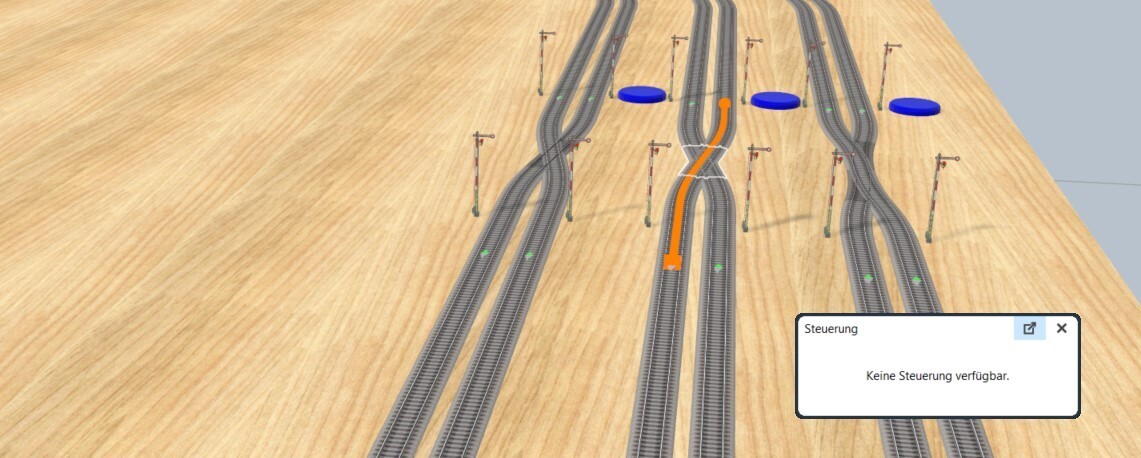
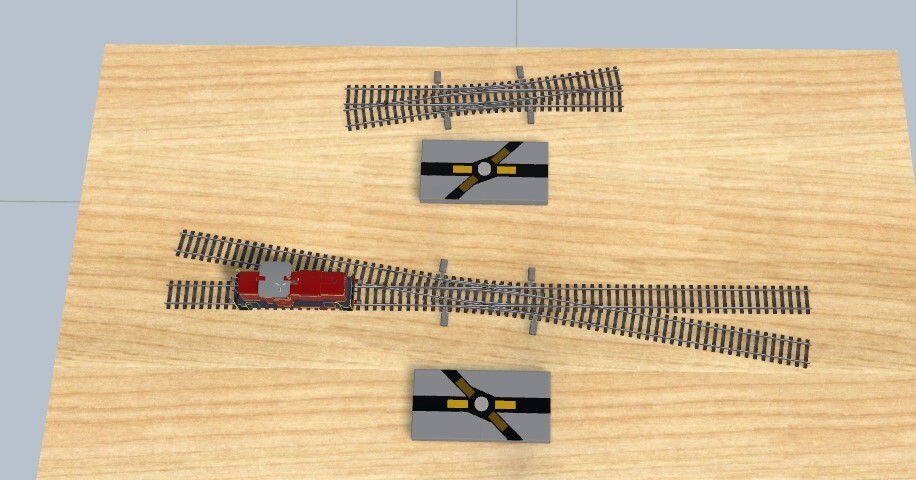
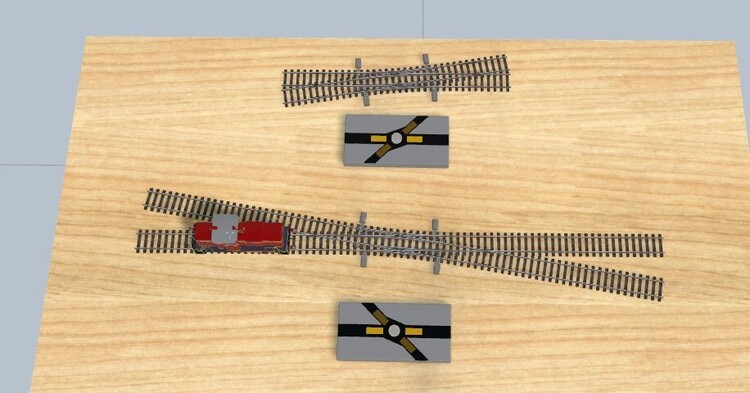
Hallo Bahnland, nein, da die Kreuzung einem normalen Gleis entspricht und in diesem Fall auch nicht "verriegelt" wird bzw. als Weiche vom Programm erkannt wird. Die aktive Fahrstraße blockiert die kreuzende Fahrstraße hier solange, bis die Fahrstraße durch erreichen des Signals aufgelöst wird. Also sollte hier das Signal an einer Stelle stehen, das die Zuglänge zwischen Kreuzung und Signal passt. Wird die einfache Kreuzung aber mit Weichenstellungen versehen, dann wird das Gleis auch "gesperrt". Die Fahrstraße wird beim Erreichen des Signals auch (wie oben) aufgelöst und die Weiche entsperrt, aber da der Zug sich noch auf der Kreuzung befindet, wird die "Weiche" erst durch die "wartende" Fahrstraße umgeschaltet, wenn der Zug die Weiche (also die Kreuzung) auch verlassen hat. Erst dann wird die andere Strecke aktiviert. Dies ist der kleine aber feine Unterschied. Ich wende Weichenstellungen schon lange auf alle einfachen Kreuzungen an. VG, Hawkeye



-
Hallo Rainer, ok, dann hier mal eine EV-Steuerung für jeweils eine rechtskreuzende und linkskreuzende DKW. Diese können beliebig oft kopiert (immer die ganze Gruppe!) werden. Jetzt aber nur über den Schalter im GBS schalten, nicht direkt an den Weichen! Sonst funktioniert es nicht, da die Weichen über Variablen im Schalter und die EV gesteuert werden. Das funktioniert aber nicht wie eine Verbindung, bei der sich Objekte gegenseitig schalten lassen. DKW über GBS gesteuert.mbp VG, Hawkeye
-
Hallo Rainer, Nochmal, benutzte Fahrstraßen. Weichen werden bei Aktivierung einer Fahrstraße automatisch für die gewählte Route gestellt. Dann brauchst du keine EV zum Schalten der einzelnen Weichen. VG, Hawkeye
-
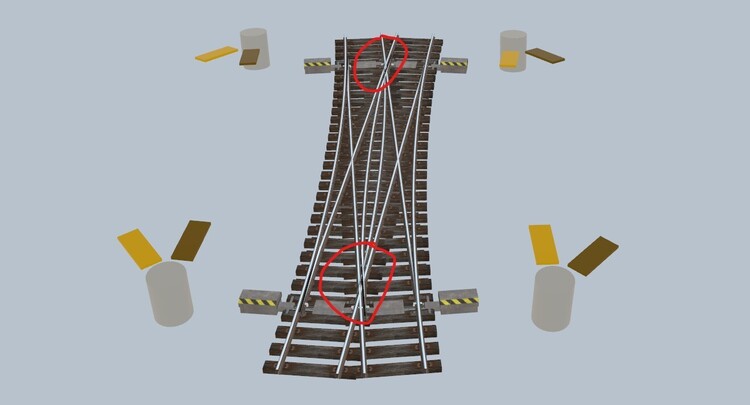
Hallo Rainer, der Bausatz diente nur als Versuch, um die animierten Zungen auch einzeln schalten zu können. Die fertigen DKW im MBS, die nur aus einem Bauteil bestehen, haben 4 Schaltmöglichkeiten (0-3),die animierten Weichenzungen aber nur zwei. Eine Schaltung über GBS habe ich bisher gar nicht vor gehabt bzw. versucht. Weichen werden über Fahrstraßen automatisch gestellt, deshalb die Konstruktion der DKW mit den beweglichen Weichenzungen aus vier einzelnen Weichen. Danke @Phrontistes, dieses Bild war meine Vorlage. 😁 Eine Möglichkeit gibt es aber schon, die animierten Weichenzungen von @BahnLand auch als DKW darzustellen. wenn man die DWK in zwei Weichen über die Diagonale baut. Dann braucht es auch nur zwei Antriebskästen. Leider folgen die Schwellen im MBS immer dem Gleisverlauf, so das die Gestänge schief eingebaut werden müssen. Und das sieht leider auch nicht gut aus. VG, Hawkeye
-
Das mein Radius nicht den Original entspricht, ist mir klar. Sollte ja auch nur eine erste Abschätzung sein, wie klein der Radius für die animierten Weichenzungen werden muß. Ich habe aber auch festgestellt, das die Angaben mancher Hersteller in Bezug auf Radien und Winkel manchmal nur grob gerundete Werte sind und sich deshalb im MBS nicht mit den Herstellerangaben umsetzen lassen. Wenn du dich daran setzt, dann überprüfe auch mal Märklin Spur Z. Da ist bei den Weichen auch irgendwo der Wurm drin. VG, Hawkeye
-
Hallo Brummi, danke. Aber ich wollte auf die Schnelle nur mal einen passenden Radius ermitteln, zu dem die neuen animieren Weichenzungen so gerade noch vor dem Herzstück enden. VG, Hawkeye
-
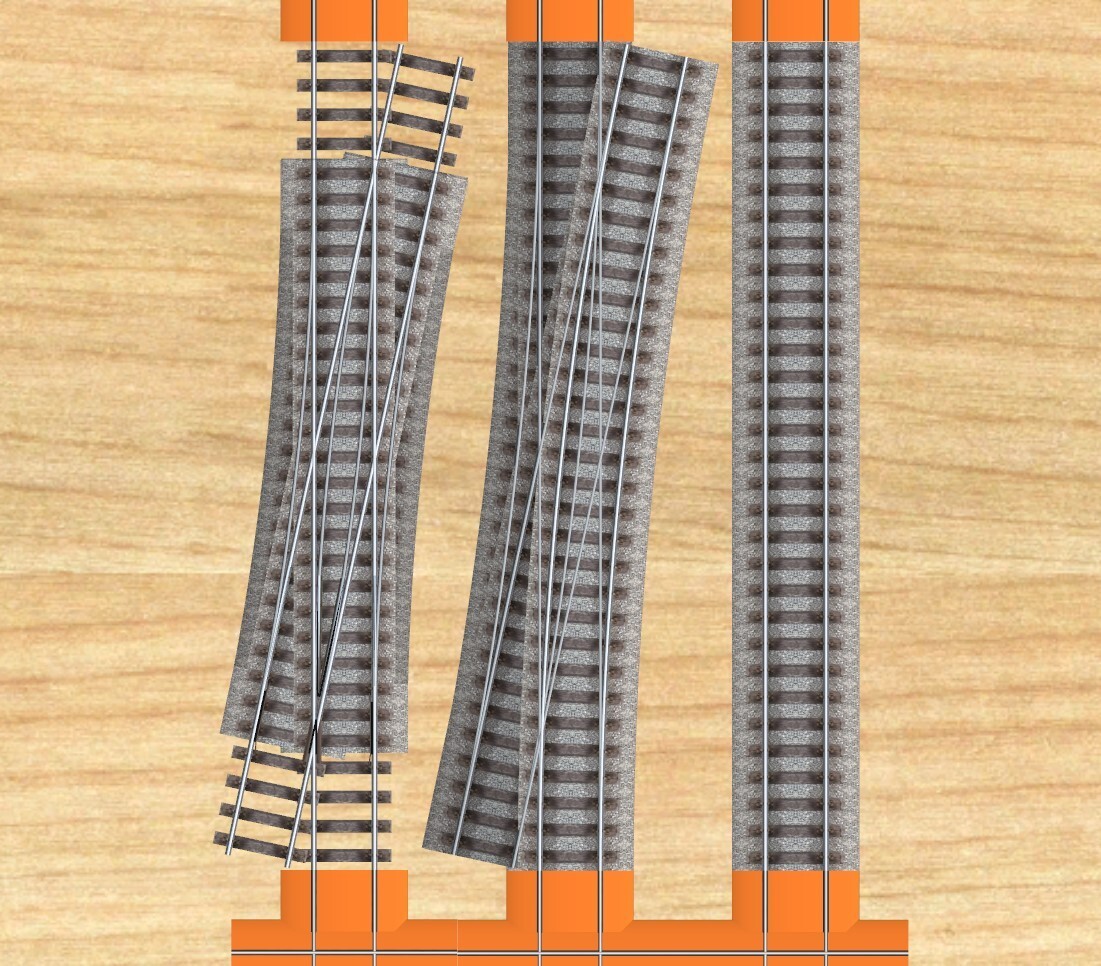
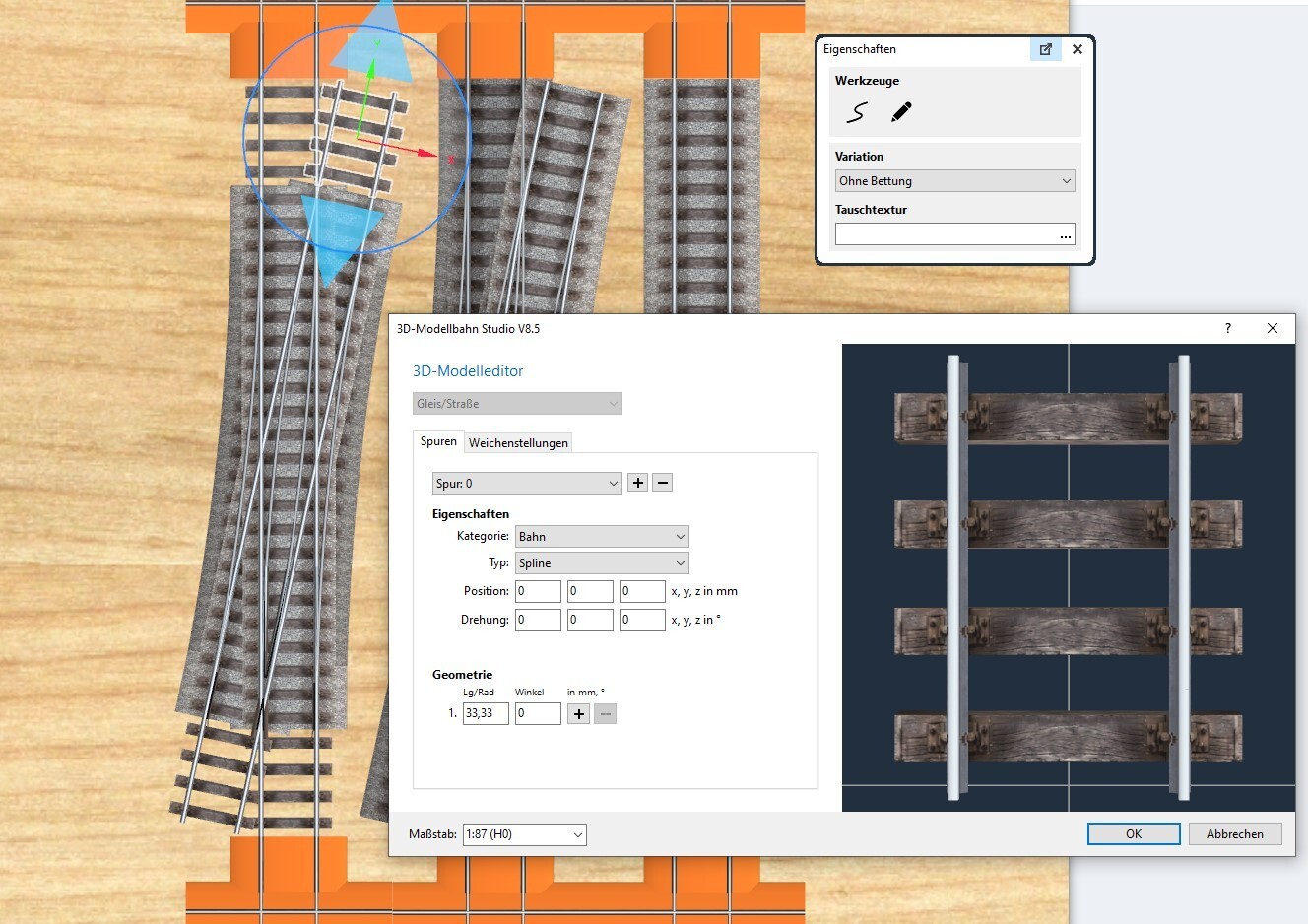
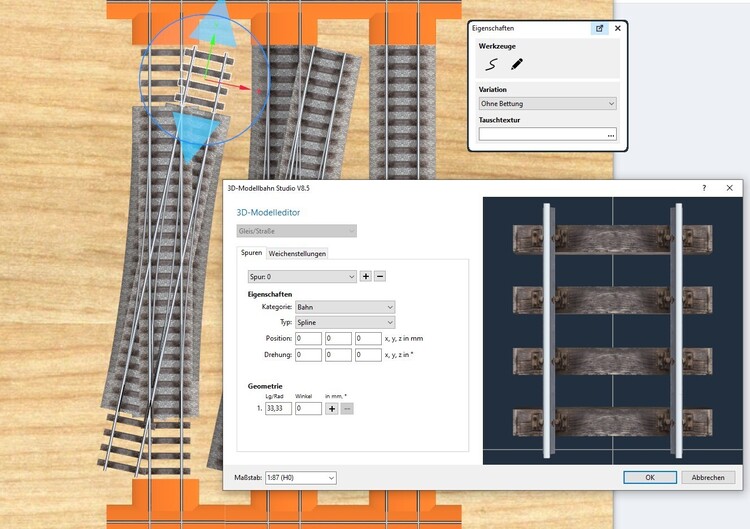
Schon geschehen. Um die neuen Weichenzungen von @BahnLand bei der Märklin C-Gleis DKW 24720 anzuwenden, muss der Radius auf 800mm reduziert und das gerade Stück bzw. die Diagonale auf 168,948mm eingestellt werden. Dann enden die Weichenzungen noch gerade so vor dem Herzstück. Die 4 zusätzlich benötigten Geraden (ohne Bettung) sind 33,33 lang. VG, Hawkeye
-
Hallo Andreas, Gut beobachtet. Ist mir bisher gar nicht aufgefallen. Habe mal nach den geometrischen Daten der DKW im Netz gesucht, aber die Angabe beschränken sich auf die Länge 236,1mm und den Winkel 12,1°. Der tatsächlich verwendete Radius wird aber leider nicht erwähnt und muss deutlich unter 1114,6 wie bei den Weichen liegen. Kennt jemand den Radius? VG, Hawkeye
-
Hallo Rainer, natürlich. Ist aber eine Fummelarbeit. DKW Beispiel mit animierten Weichenzungen.mbp Es wird aber nicht für jede Gleisradius/Winkel-Kombination der DKW im Katalog funktionieren. Bei der Märklin C-Gleis DKW 24720 z.B. würden die Weichenzungen im Herzstück liegen. VG, Hawkeye

-
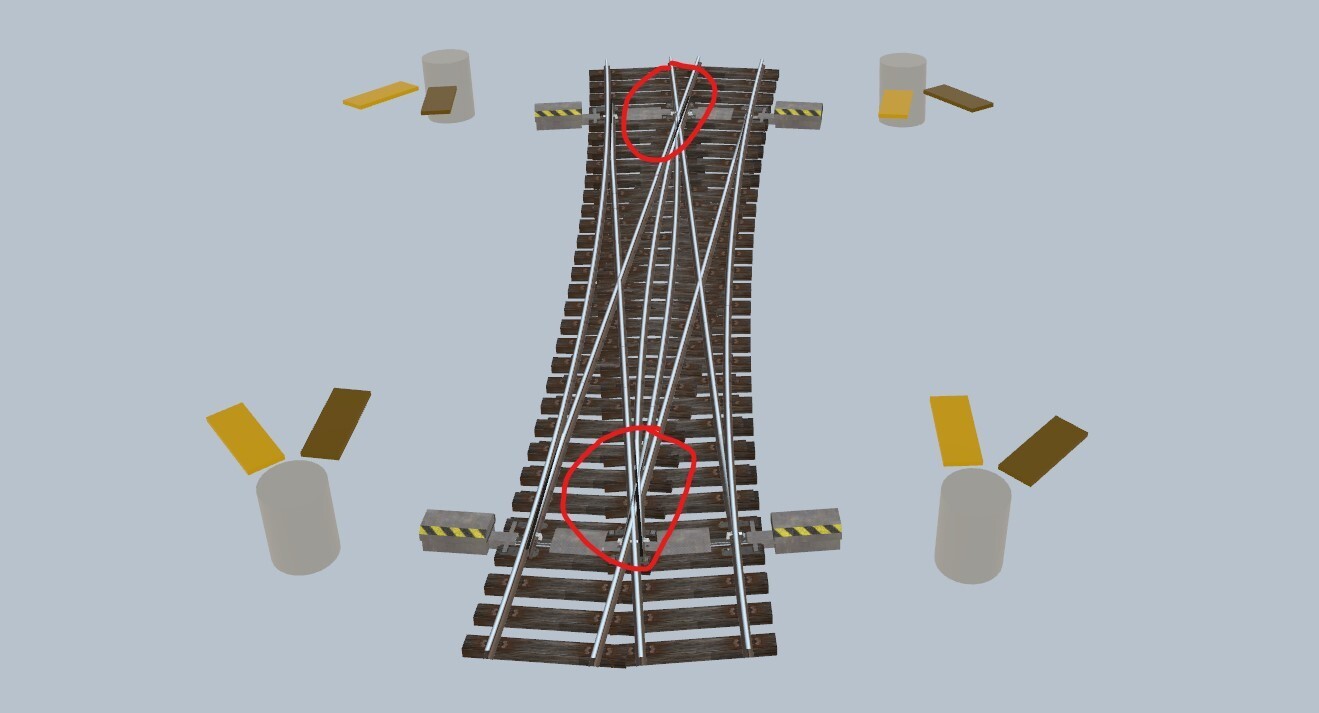
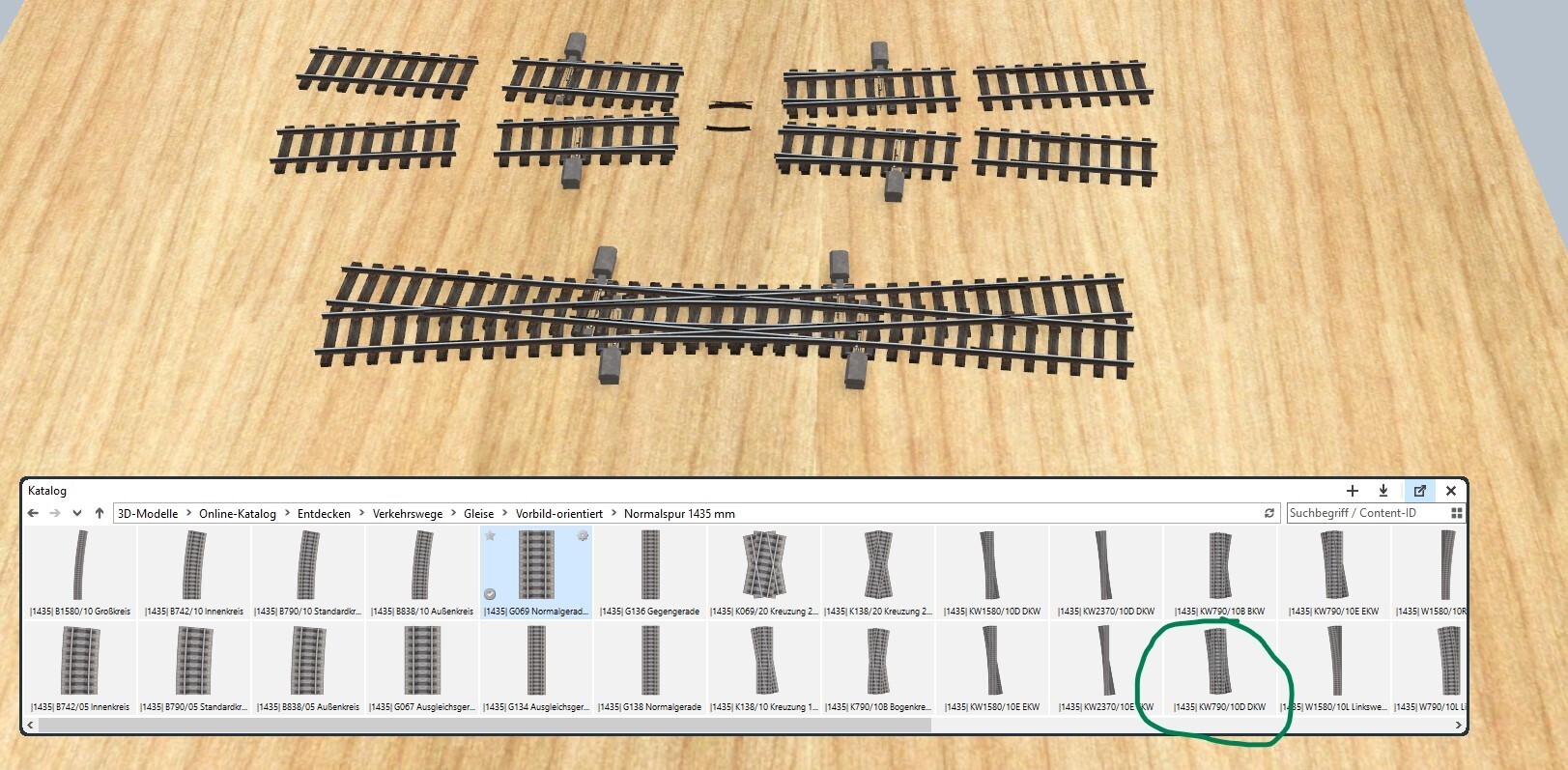
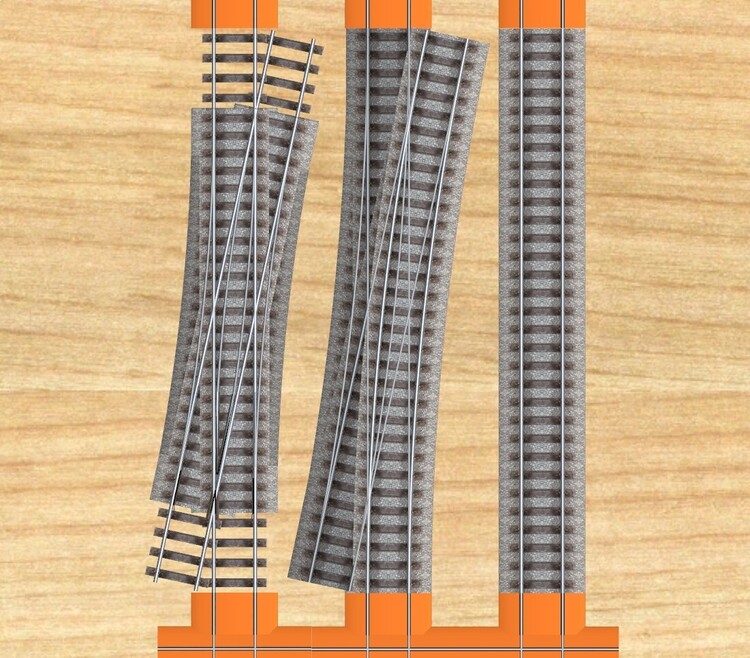
Hallo @BahnLand, sehr schöne filigrane Details. Mit etwas Übung und Spucke lassen sich für geeignete Radien auch DKW's mit animierten Weichenzungen bauen. Hier mal nach den Abmessungen der KW790/10D DKW. VG, Hawkeye
-
Um das beurteilen zu können, müssten wir die Anlage und Situation kennen, warum die FS anscheinend zu lange blockiert bleibt. Bleibt also nur die Frage so zu beantworten, wie sie verstanden wurde. Egal ob die Lösung zielführende ist oder nicht.😉 VG, Hawkeye
-
Hallo Atrus, nein, so wie ich das verstanden habe, soll der Zug nach Ablauf der Frist eine alternative Route nehmen. Als Beispiel: Zug soll im Bahnhof auf Gleis X einfahren. Die Einfahrt auf Gleis X ist blockiert. Nach Ablauf der eingestellten Zeit des Timers wird geprüft, ob die FS immer noch blockiert ist. Wenn das so ist, dann soll der Zug auf ein anderes Gleis einfahren. VG, Hawkeye
-
Hallo @jloos, Versuch es doch mal mit einem Timer, der bei „blockiert“ aktiviert wird und nach Ablauf der eingestellten Zeit diese Überprüfung wiederholt. VG, Hawkeye
-
Hallo Ralf, die man aber auch vermeiden kann. Wie das möglich ist, habe ich mal hier erklärt. VG, Hakweye
-
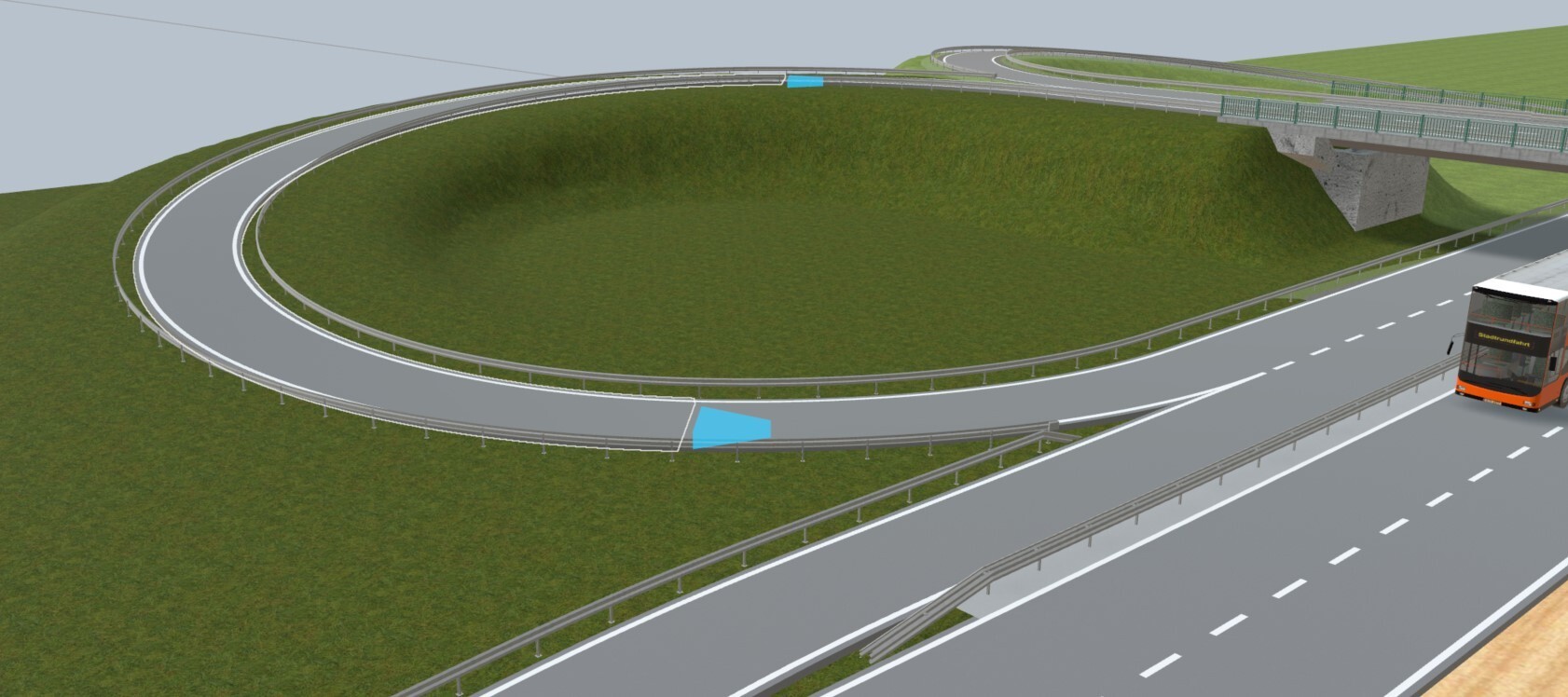
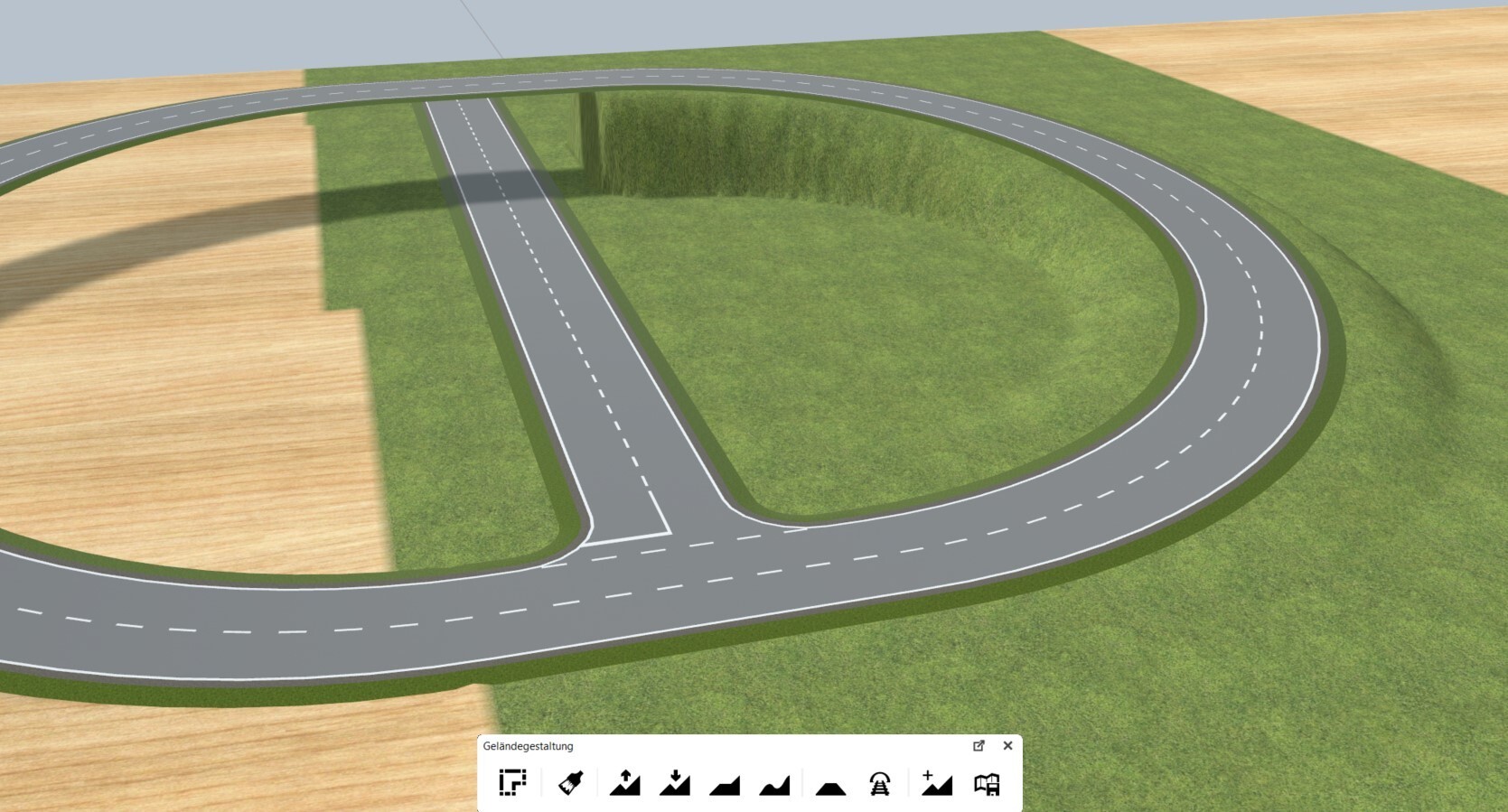
Sollte man bei Bau vermeiden! Hier fängt z.B. die Steigung erst später an. Dadurch kannst du Konflikte und Knicke im Verlauf vermeiden. VG, Hawkeye

-
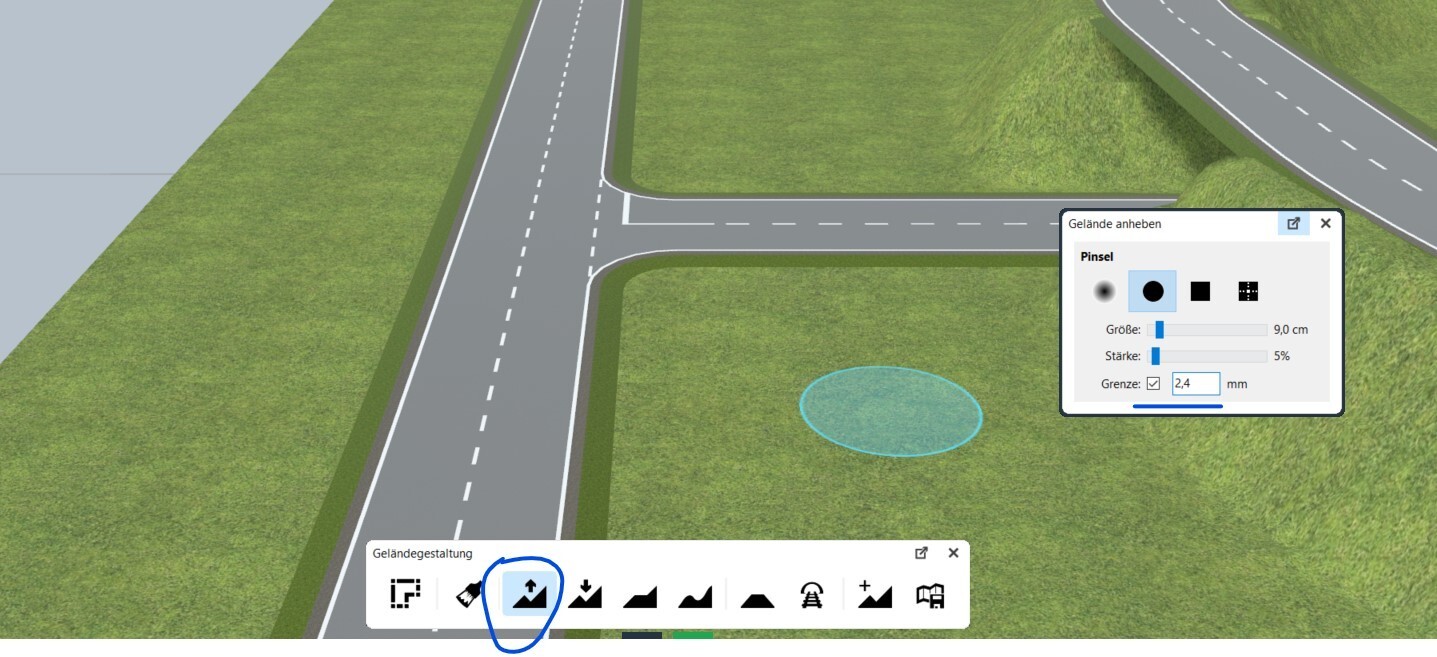
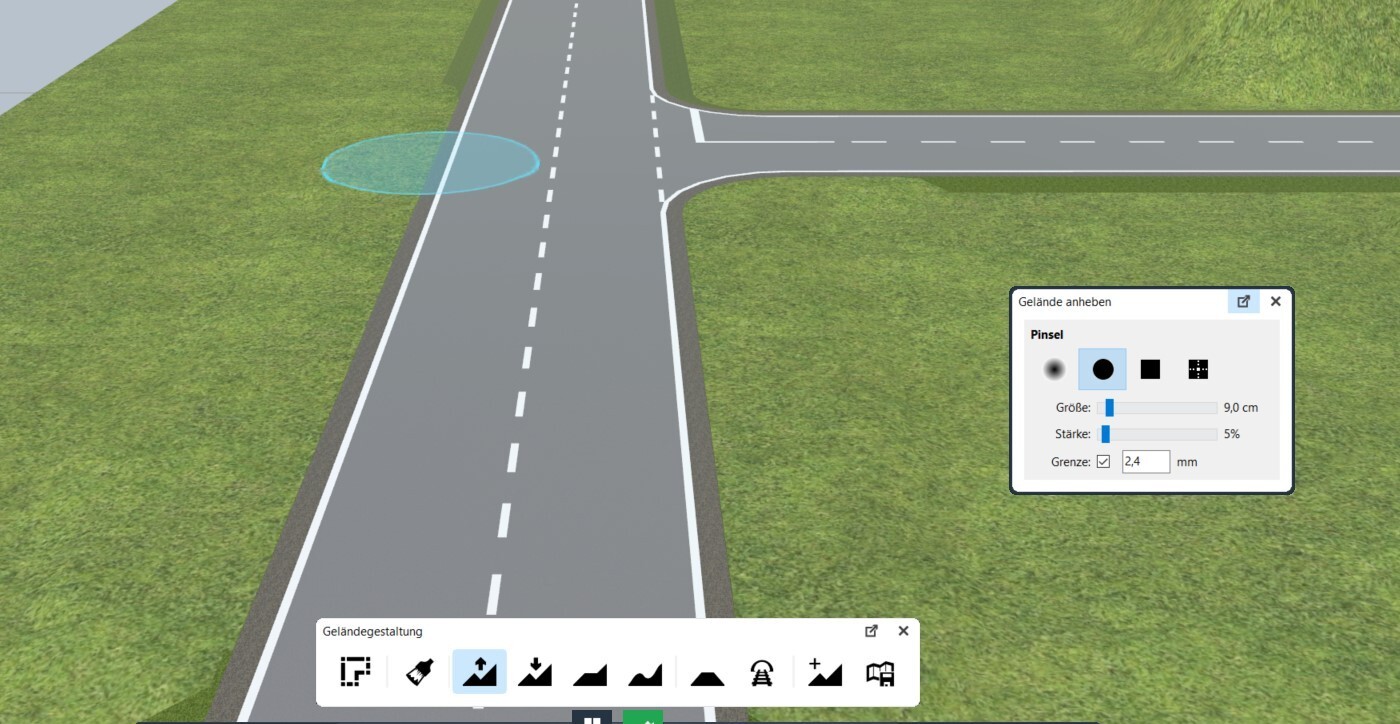
Ergänzung: Bei Straßen, die auf einer Höhe liegen, reicht es den Randbereich um 2,4 anzuheben. Hier im Beispiel von Höhe 0. Nur am Rand der Straße entlang fahren, und der grüne Streifen ist weg. VG, Hawkeye


-
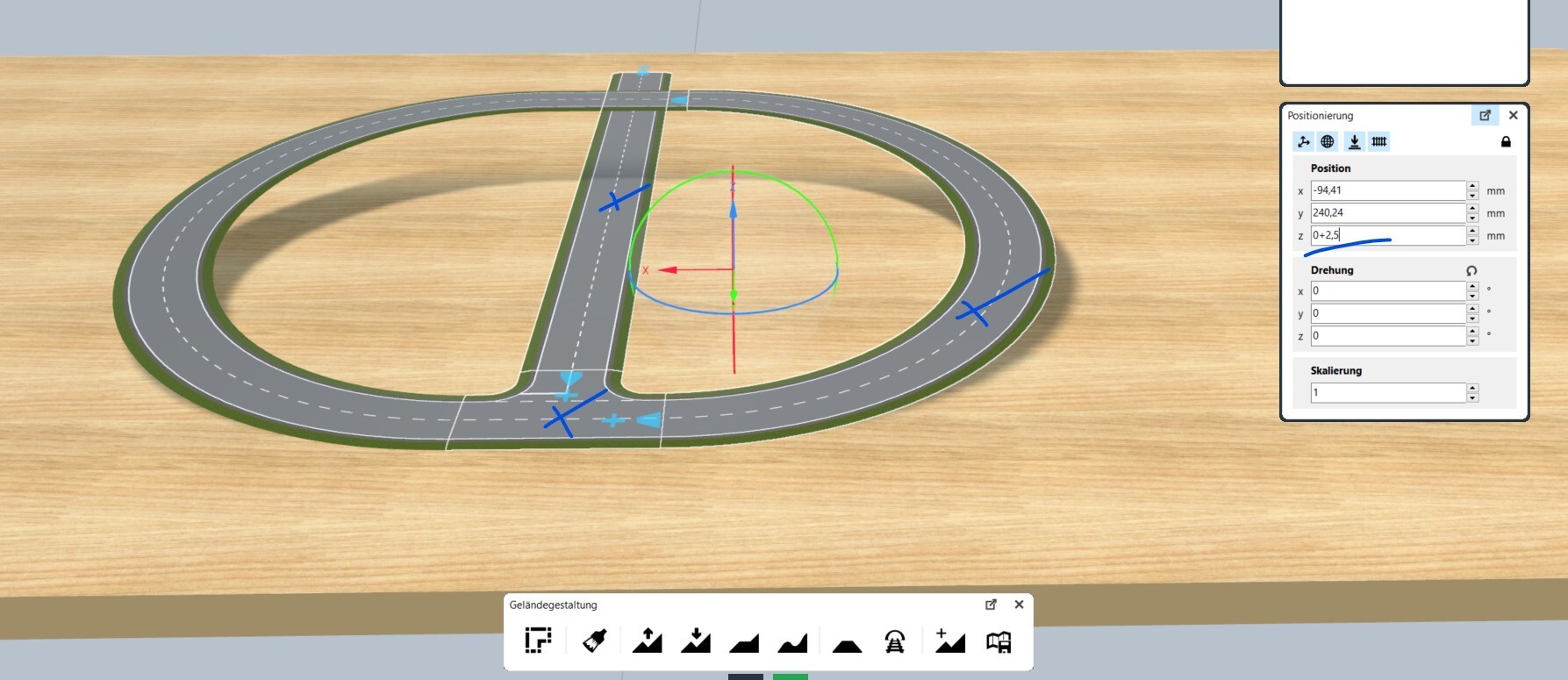
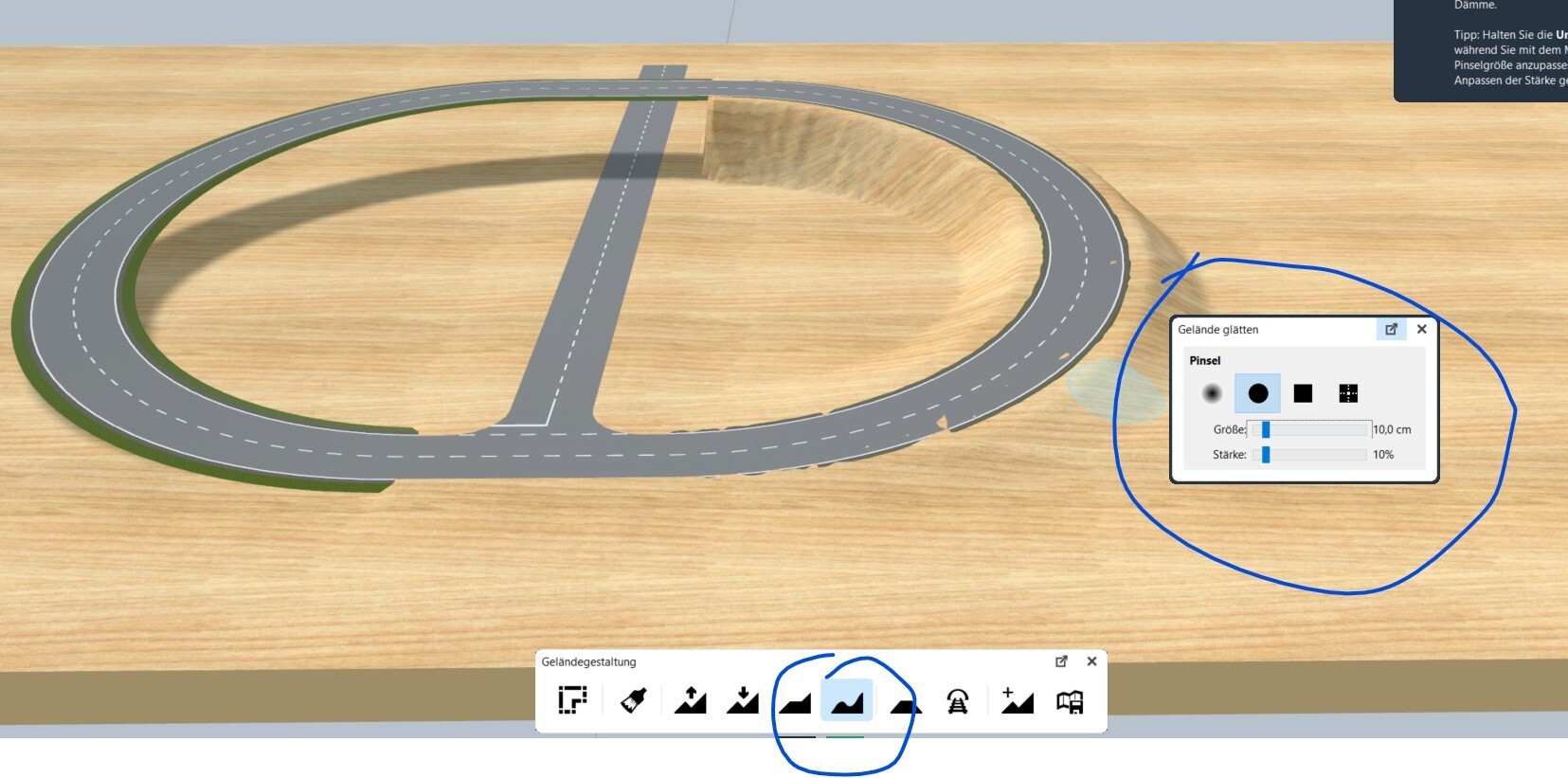
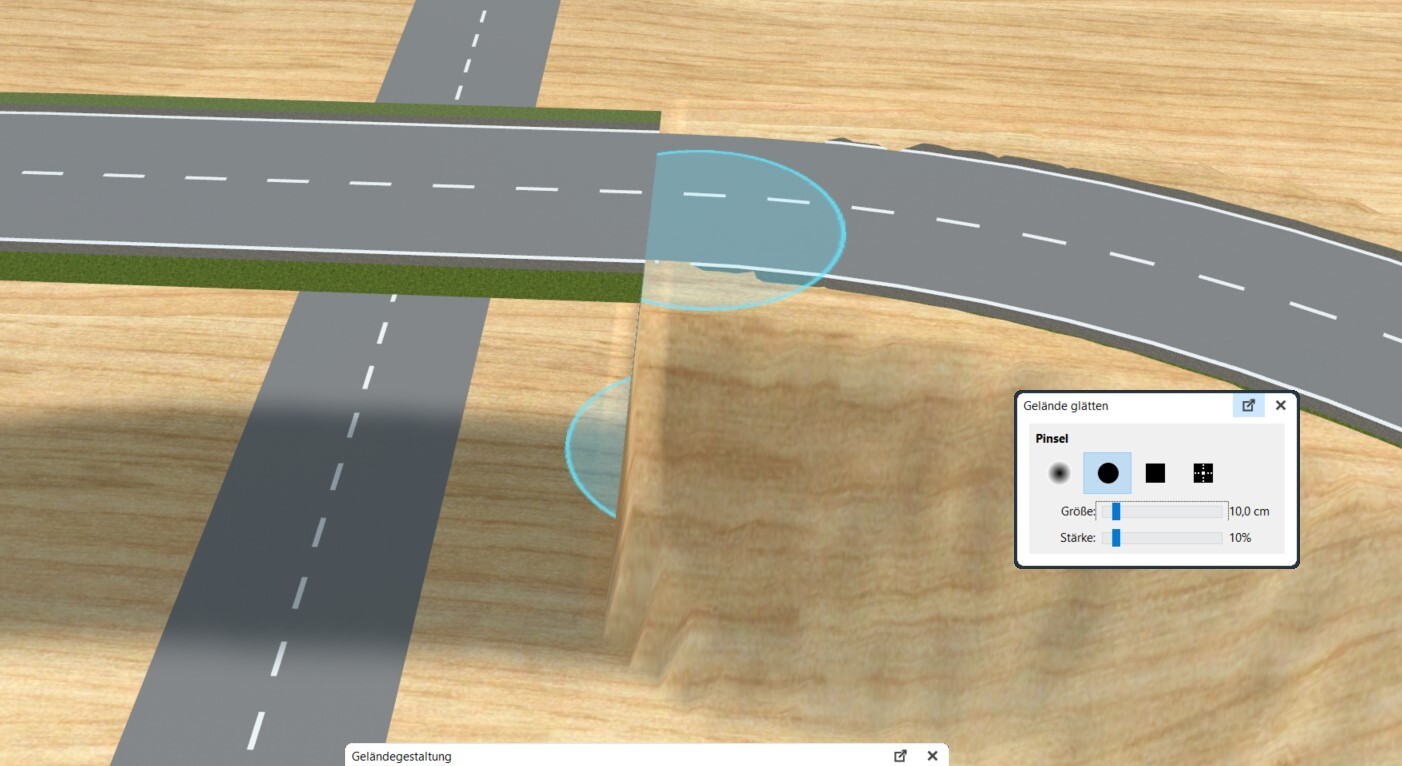
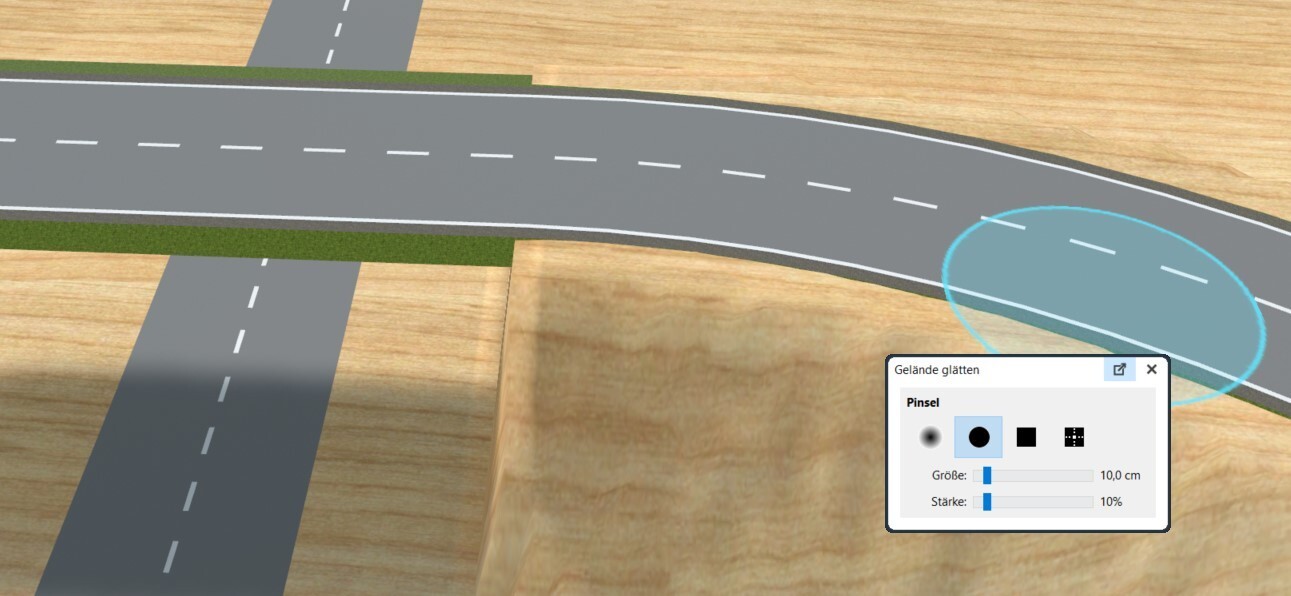
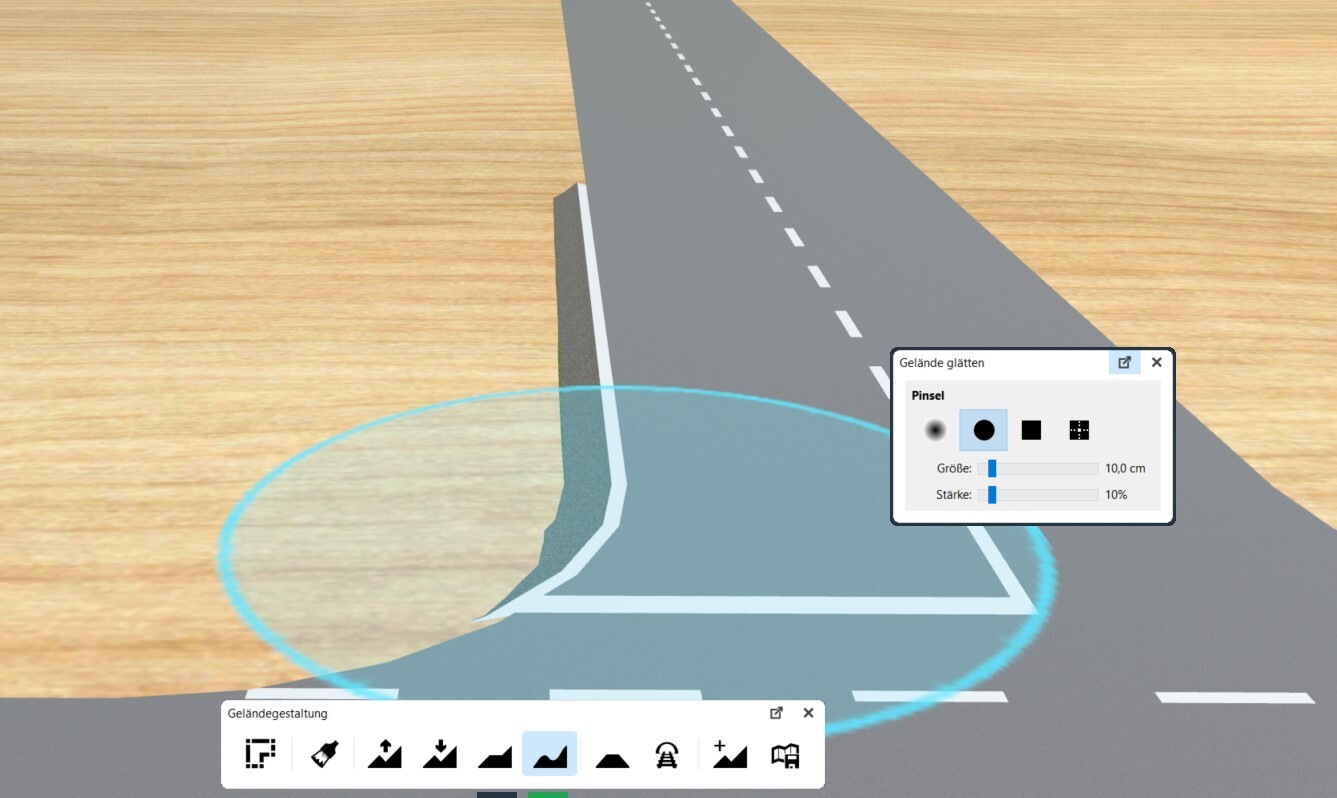
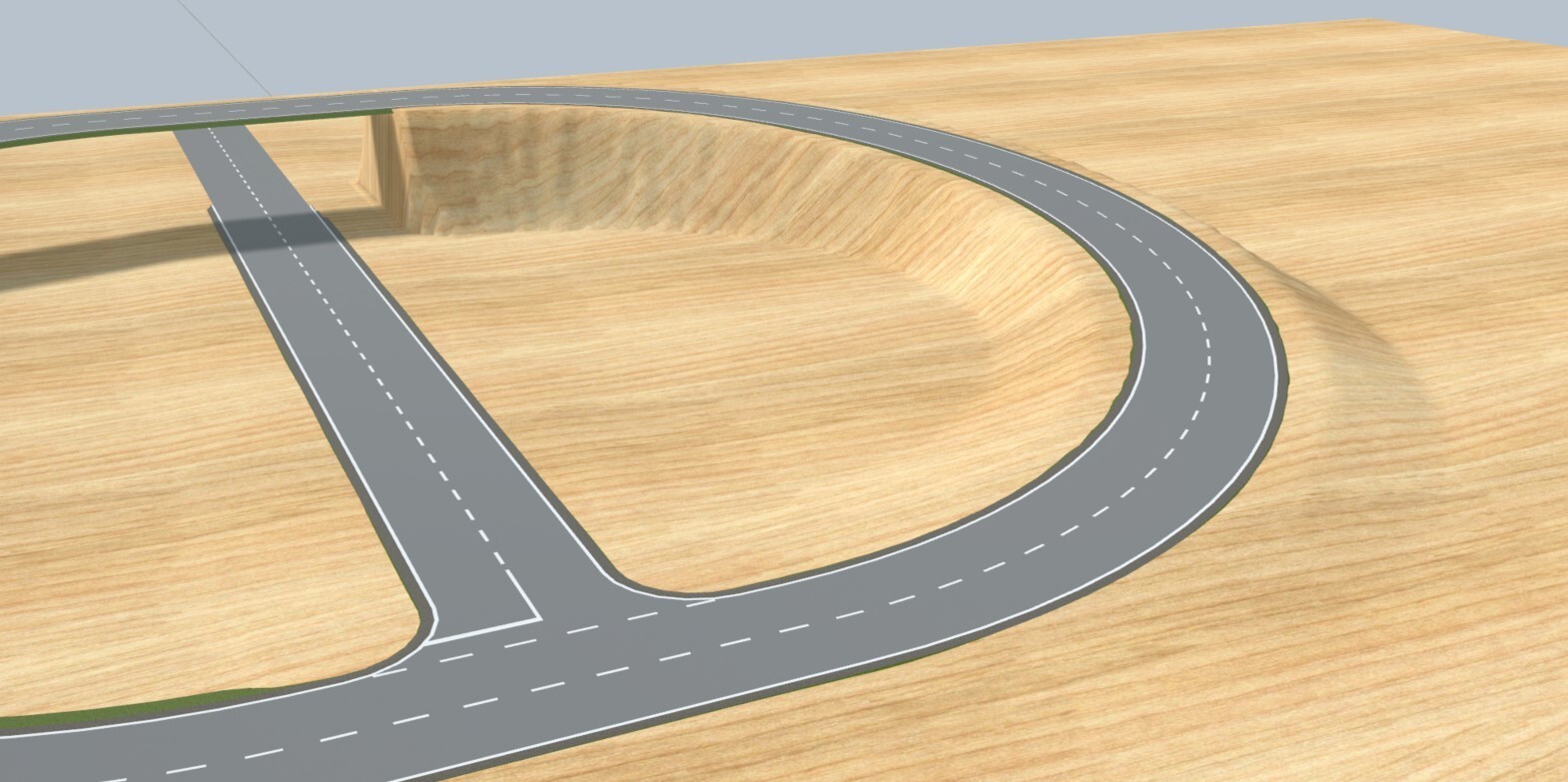
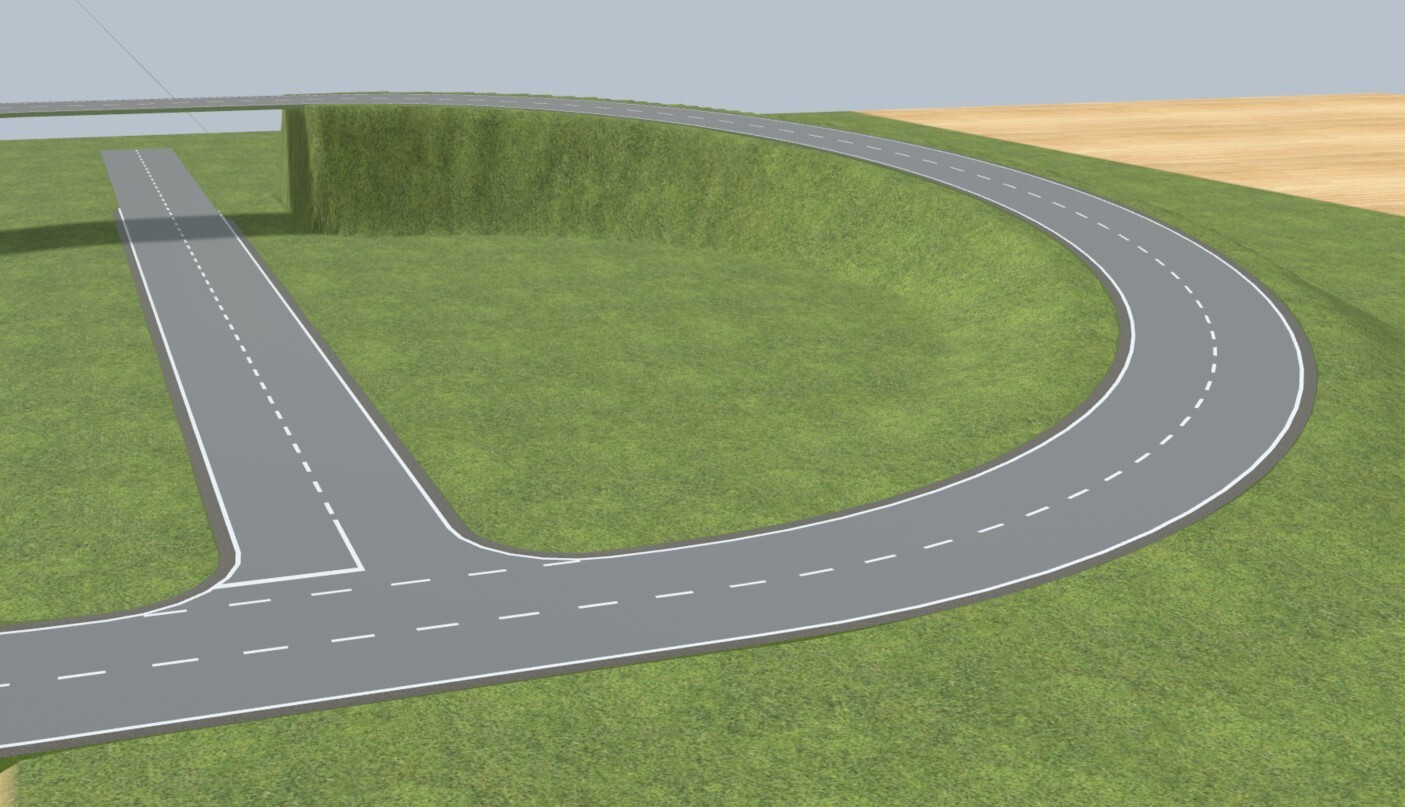
Hallo Ralf, mit der richtigen Technik und etwas "finetuning" ist das nicht notwendig. Ich glaube @Roter Brummer hat die notwendige Technik dazu mal bei der Beschreibung zur Erstellung von Modulen beschrieben. Diese lässt sich bei Straßen mit Bankette aber auch anwenden. Hier ein Beispiel: Wähle die Spuren der Straße, bei denen die Bankette verschwinden soll und erhöhe den z-Wert um 2,5. Die gewünschte Breite und Verlauf mit "Rampen und Böschung" einstellen und übernehmen. Jetzt den z-Wert wieder um die 2,5 zurücksetzten. Schon ist die Bankette weg. Das gröbste ist also schnell geschafft. Jetzt zum finetuning. Mit "Gelände Glätten" bei kleiner Pinselgröße und Stärke, reicht es meist punktuell zu "Tupfen", und die Straße ist sauber und die grüne Bankette weg, bzw. kaum wahrzunehmen. Hier das Ergebnis. Mit etwas Übung geht das eigentlich sehr schnell. In Steigungen sind vielleicht einige Stellen noch mit "Gelände absenken" zu bearbeiten, aber auch hier nur mit der Maus "tupfen" und die Straße ist frei. Hier das Endergebnis: Hier noch zum Vergleich, wie es ohne Anwendung dieser Technik aussieht. VG, Hawkeye











-
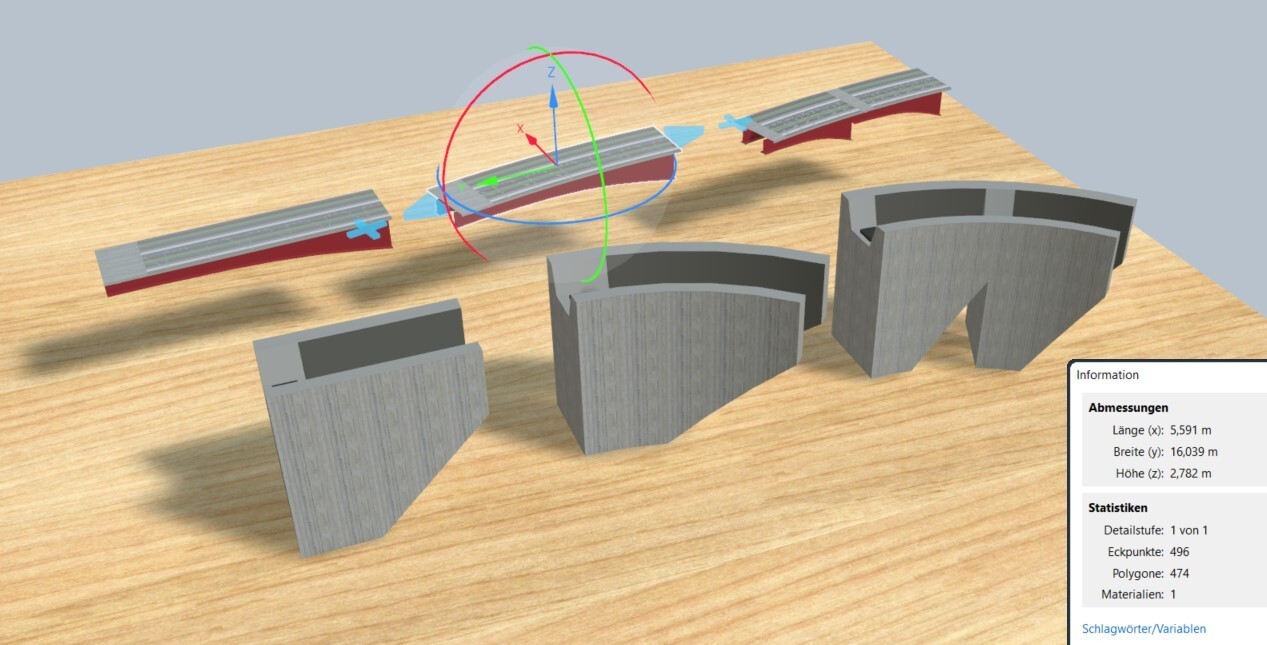
Hallo Thomas, sieht toll aus. Aber die Brücke ist noch im Entwurf und eigentlich für den Straßenverkehr vorgesehen! Für Lasten wie die schweren Güterwagen ist sie nicht konstruiert. Pass auf das sie nicht einstürzt. VG, Hawkeye
-
Danke, dann habe ich Voraussetzungen falsch interpretiert. Ok, super, danke für die Info. VG, Hawkeye
-
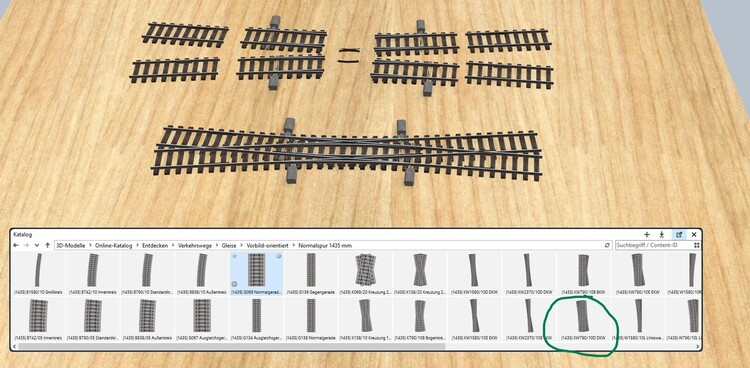
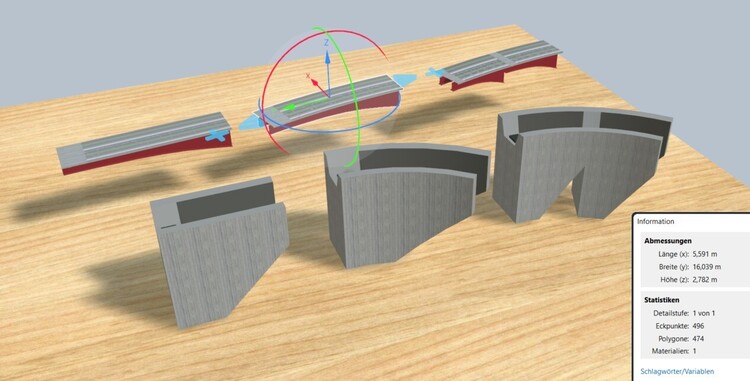
Hallo @Neo, oder würdest du beim Upload-Check von in Spline-Richtung erkennbar unsymmetrischen Modellen auf die Begrenzung von 250 Polygonen verzichten können? Die rechten vervielfachten Modelle würde sich ja wohl eh keiner auf eine Anlage stellen, ohne die Länge wieder zurück zu korrigieren, oder? Dadurch würde sich der Konstruktionsspielraum schon jetzt doch schon wesentlich erhöhen. VG, Hawkeye
-
Danke, aber soooo weit bin ich noch lange nicht. Ich installiere Add-ons dann, wenn die Benutzung in einem Tutorial erklärt wird und ich danach auch weiß wofür sie sind und was sie machen. VG, Hawkeye
-
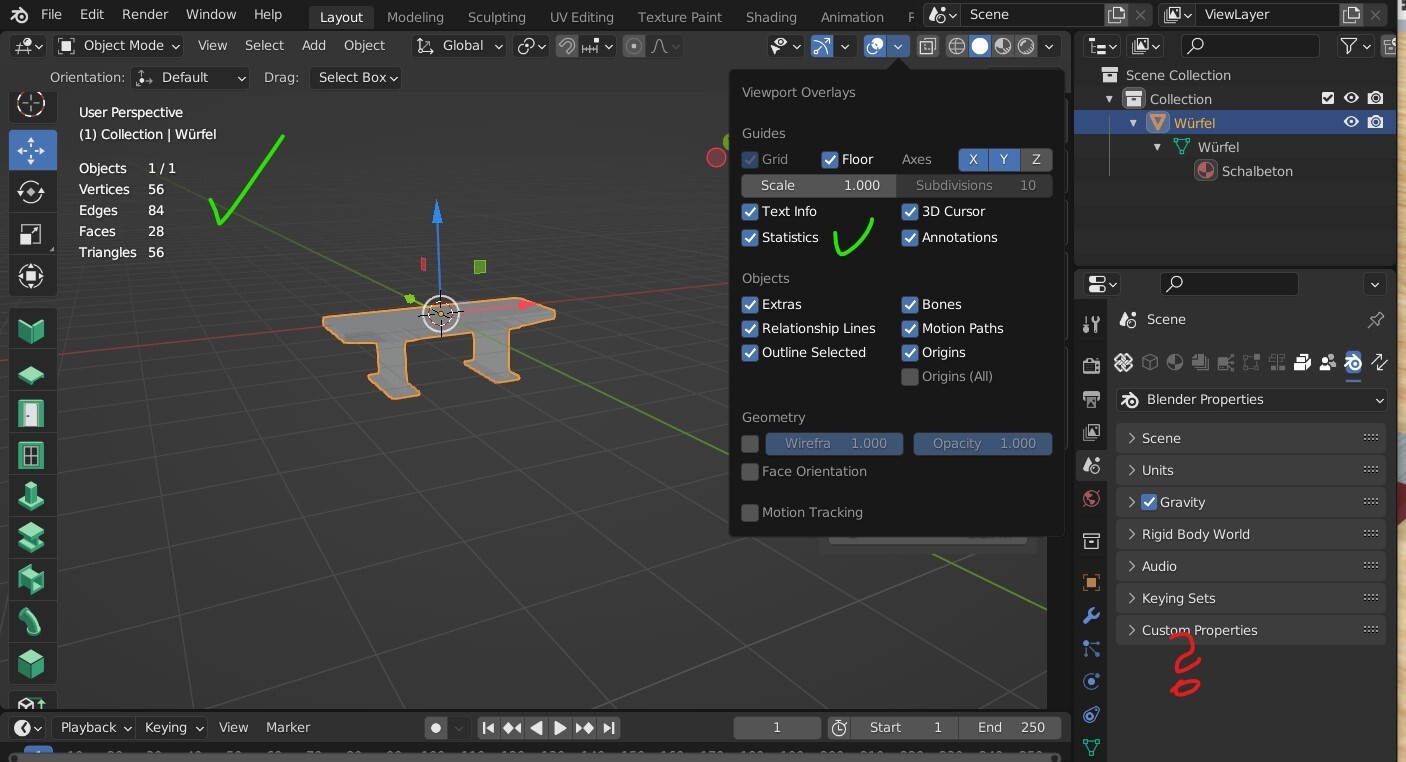
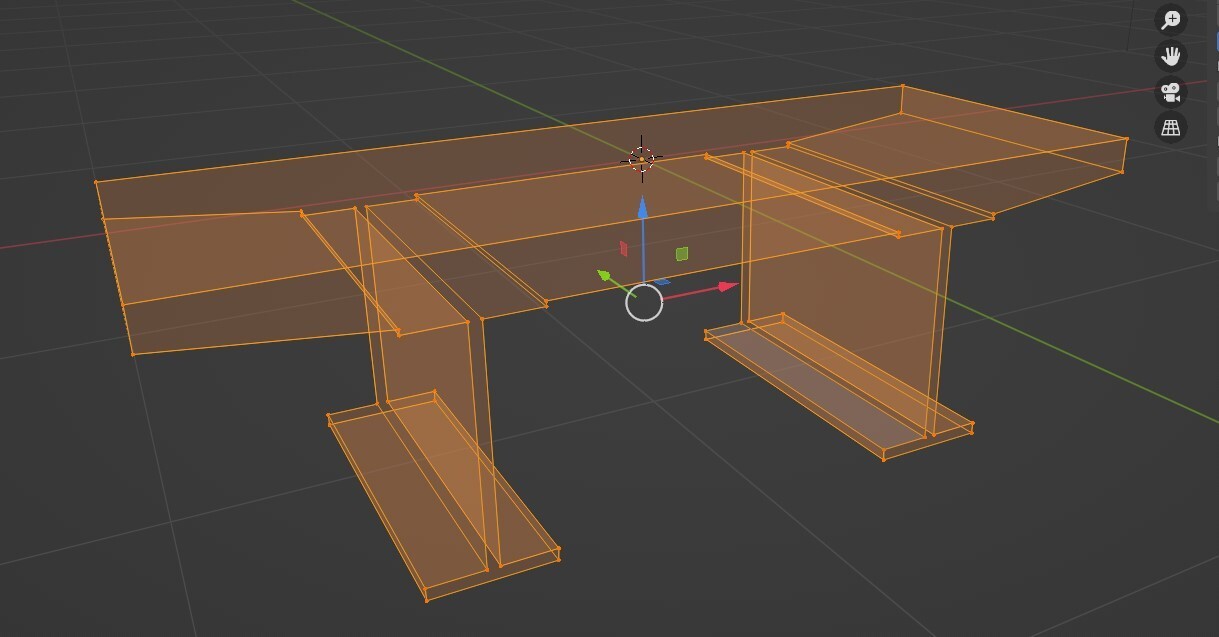
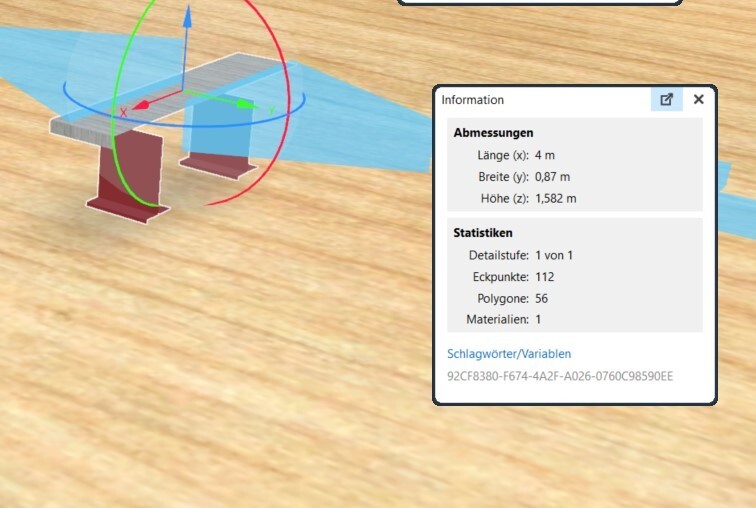
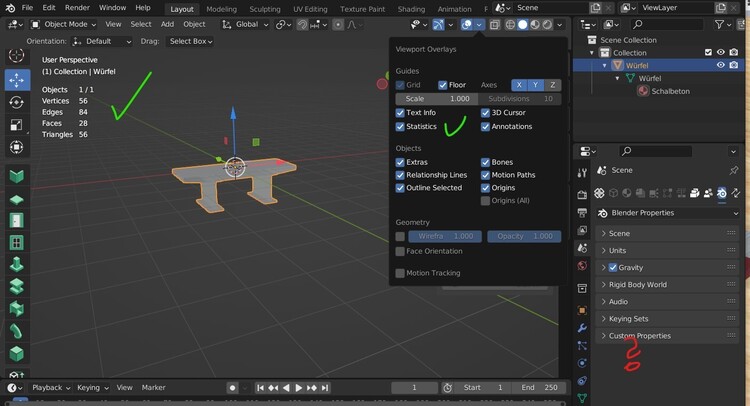
Hallo, Ja, eigentlich. Aber als ich das Modell da erste mal ins MBS geladen hatte, haben einzelne Flächen geflimmert. Bei der Überprüfung des Objekts in Blender habe ich dann festgestellt, das ich es beim Spiegeln irgendwie auch verdoppelt hatte, ohne es zu merken. Ich habe dann alle Flächen nochmal einzeln überprüfen und die doppelten Flächen löschen müssen. Anfängerfehler. @maxwei: Es sieht bei mir zwar etwas anders aus, aber die Statistik habe ich jetzt eingeschaltet, danke. "Blend Info" wird bei mir z.B. nicht angezeigt. Ich habe Blender 3.2.0 im Einsatz und wohl nicht die optimalen Voreinstellungen. VG, Hawkeye
-
Hallo, mal wieder eine Frage an die Experten. Kann man sich in Blender die Anzahl der Eckpunkte eines Objektes anzeigen lassen? Dieses Objekt hat gezählte 56 Eckpunkte. Wenn ich das Objekt ins MBS einfüge, egal ob als Spline oder einfaches 3D-Modell, dann sind es 112. Woher kommt die Verdopplung der Eckpunkte? VG, Hawkeye